一种用于横编织机的抓取装置的制作方法
1.本实用新型涉及织机领域,特指一种用于横编织机的抓取装置。
背景技术:
2.随着技术的发展,越来越多的编织物可以通过圆编织机、横编织机等由电脑控制的织机进行编织。
3.此处的横编织机指由电脑控制的针纬编织横机,以及采用横机方式编织的手套机等织机。
4.以编织手套为例,可以由横编织机或专门编织手套的手套机进行编织,当手套编织完成后,常见的收集方式是在横编织机或手套机的机体侧面开设一个通道,使手套在前、后针板之间(如有选针滚筒,则选针滚筒设置在对应的针板下方)形成后从通道中自由落体后进入到机体外的收集筐中,再由人工进行整理收集打包,参考申请人的在先申请专利一种横编织机-cn201910132505.6,说明书附图12。
5.上述生产方式下,还需要额外安排人员对手套进行收集整理,既浪费人工,且整理效率不高,因此,本发明人对此做进一步研究,研发出一种用于横编织机的抓取装置,本案由此产生。
技术实现要素:
6.本实用新型的目的在于提供一种用于横编织机的抓取装置,可以将编织完成的织物输送到机体外进行堆叠整理,提高生产、包装效率。
7.为了实现上述目的,本实用新型的技术方案如下:
8.一种用于横编织机的抓取装置,设置于机体内并相对位于前、后针板下方,包括
9.抓取部,抓取部通过第一驱动源的驱动上下升降,同时通过第二驱动源的驱动将抓取住的织物送出机体外;
10.升降杆,抓取部设置在升降杆上,升降杆与第一驱动源联动;升降杆还与第二驱动源联动,第二驱动源驱动升降杆进行摆动。
11.通过在前、后针板下方设置的抓取装置,可以等待织物的形成并进行夹取,夹取后沿竖直方向下降,并通过移动翻转将织物放置在机体外的承接平台上进行自动堆叠。
12.进一步,第一驱动源为升降电机或者气缸。
13.当升降杆与升降电机联动时,可采用常见的齿轮齿条或丝杆作为升降结构;当第一驱动源为气缸时,可采用活塞杆推动升降的结构。
14.进一步,第二驱动源为旋转电机,旋转电机通过齿轮组带动升降杆摆动,从而使抓取部能移动到机体外侧。
15.如果直接由电机轴带动升降杆摆动,其扭矩较小,因此需要通过齿轮组对输出扭矩进行放大,才方便带动升降杆进行摆动。
16.进一步,抓取部包括夹持臂、活动臂和固定臂,固定臂与升降杆固定连接,活动臂
能相对于固定臂开合,活动臂和固定臂上皆设置有横向的夹持臂,通过控制活动臂使两个夹持臂相对开合对织物进行夹取或松开。
17.可参考常见的夹钳类工具的结构,只是由于抓取装置需要与升降杆连接,因此主要通过活动臂进行开合控制而非双臂控制开合。
18.进一步,活动臂为“ㄑ”结构,其中间的弯折部枢接在固定臂上,同时在枢接处设置扭簧,使活动臂未收外力作用时,活动臂的夹持臂与固定臂的夹持臂贴合;当活动臂的尾端受外力作用时,活动臂的夹持臂与固定臂的夹持臂打开。
19.对活动臂作用的外力即可以通过电控实现,也可以通过纯机械结构实现,使活动臂在夹持织物之前处于打开状态。
20.进一步,前、后针板下方设置有竖向的第一限位滑轨,承接平台上方设置有伸出机体外的第二限位滑轨,活动臂远离抓取部的一端设置有第一滚轮,活动臂靠近抓取部的一端设置有第二滚轮;第一滚轮沿第一限位滑轨正面滑动时,活动臂的夹持臂与固定臂的夹持臂处于打开状态,当第一滚轮从第一限位滑轨脱离或越过第一限位滑轨的上端后,活动臂的夹持臂与固定臂的夹持臂处于闭合状态;抓取部移动到承接平台上方时,第二滚轮在第二限位滑轨上方滑动,使活动臂的夹持臂与固定臂的夹持臂逐渐打开。
21.通过电控手段实现上述目的的成本较高,稳定性相对较差,因此作为优选,通过对织物本身的长度测算,可以用第一限位滑轨以及第二驱动源的驱动,使第一限位滑轨对活动臂施加作用力,使活动臂的夹持臂相对固定臂打开,当升降杆将抓取部送到在编织物处时,使第一滚轮脱离并越过第一限位滑轨,取消该作用力,使抓取部夹住编织物,第一滚轮从第一限位滑轨反面下降,再通过第二驱动源的转动,从而可以将编织物运送到承接平台上,而在第二限位滑轨的作用下,第二滚轮受力,使活动臂的夹持臂打开,而织物在整理机构按压部的固定,被固定在承接平台上;此处第一限位滑轨的正面是其面向承接平台的一侧。
22.进一步,第一限位滑轨的上端设置有一弯曲部,当活动臂尾端的第一滚轮处于弯曲部时,活动臂的夹持臂与固定臂的夹持臂处于闭合状态。
23.在对织物夹持前,在编织中的织物可能并不非常平整,因此活动臂的第一滚轮处于弯曲部时,抓取部处于对织物的夹持状态,当第一滚轮不越过第一限位滑轨顶部而是选择往原路下降使,抓取部的两个夹持臂对织物有个捋平的动作,从而方便后续的堆叠整理。
24.采用上述方案后,本实用新型与现有技术相比,具有以下优点:
25.通过创造性的设计,使横编织机或手套机实现了从生产编织到自动抓取堆叠整理的自动化生产,提高了生产效率,减少了人工。
附图说明
26.图1是本实用新型的实施例示意图;
27.图2是抓取部上升时的示意图;
28.图3是抓取部向机体外翻转的示意图之一;
29.图4是抓取部向机体外翻转的示意图之二;
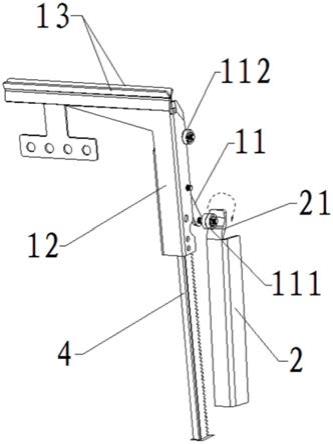
30.图5是图2的局部示意图;
31.标号说明
32.抓取部1,活动臂11,第一滚轮111,第二滚轮112,
33.固定臂12,夹持臂13,
34.第一限位滑轨2,弯曲部21,第二限位滑轨3,
35.升降杆4,升降电机5,旋转电机6,摆动杆7,输送带8,
36.选针滚筒9。
具体实施方式
37.下面结合附图和具体实施例对本实用新型作进一步的说明。
38.以制作手套为例,在编织过程中,针床先进行手指的编织,然后进行手掌编织,最后进行手掌的收口,编织过程中手套的手指向下,从前、后针板下方的两个选针滚筒9之间自由落下。
39.当在上述过程中加入本实用新型的技术方案后,如图所示,一种用于横编织机的抓取装置,设置于前、后针板下方,其包括抓取部1,抓取部1包括活动臂11和固定臂12,活动臂11和固定臂12上皆设置有横向的夹持臂13,固定臂12与升降杆4固定连接,活动臂11为“ㄑ”结构,其中间的弯折部枢接在固定臂12上,同时在枢接处设置扭簧,扭簧使活动臂11未收外力作用时,活动臂11的夹持臂13与固定臂12的夹持臂13处于贴合状态。
40.升降杆4本身为齿条结构,通过齿轮与作为第一驱动源的升降电机5联动,通过齿轮齿条之间的联动带动整个抓取部1升降。
41.而升降杆4还通过齿轮组与作为第二驱动源的旋转电机6联动,通过旋转电机6的转动带动升降杆4、抓取部1一起摆动,摆动方向从承接平台到选针滚筒9,从而使抓取部1能移动到机体外侧。
42.当活动臂11的任一一端受外力抬起或按下的作用力时,活动臂11的夹持臂13与固定臂12的夹持臂13打开。具体的,通过在前、后针板下方设置有竖向的第一限位滑轨2,承接平台上方设置有伸出机体外的第二限位滑轨3,活动臂11远离抓取部1的一端设置有第一滚轮111,活动臂11靠近抓取部1的一端设置有第二滚轮112;第一滚轮111沿第一限位滑轨2正面滑动时,活动臂11的夹持臂13与固定臂12的夹持臂13处于打开状态,当第一滚轮111从第一限位滑轨2脱离或越过第一限位滑轨2的上端后,活动臂11的夹持臂13与固定臂12的夹持臂13处于闭合状态;抓取部1移动到承接平台上方时,第二滚轮112在第二限位滑轨3上方滑动,使活动臂11的夹持臂13与固定臂12的夹持臂13逐渐打开。
43.上述动作中,抓取部1的升降通过第一驱动源实现,抓取部1的摆动通过第二驱动源实现。
44.本实用新型的抓取装置可以与摆动杆7配合,摆动杆7与摆动电机联动,摆动杆7相对位于承接平台上方,在手套被运输到承接平台上后,通过摆动杆7对手套进行固定。
45.承接平台包括输送带8,输送带8下方设置有升降机构,升降机构的连杆为x结构,并通过电机与丝杆的配合,对x型的连杆高度进行改变,从而改变输送带8的相对高度,随着手套堆叠的增多,升降机构可调节承接平台的高度,而输送带8可将堆叠完的手套送走。
46.上述实施例通过对手套本身的长度测算,以第一限位滑轨2以及第二驱动源的驱动,使第一限位滑轨2对活动臂11施加作用力,使活动臂11的夹持臂13相对固定臂12打开,当升降杆4将抓取部1送到在编手套处时,使第一滚轮111脱离并越过第一限位滑轨2,取消
该作用力,使抓取部1夹住手套手掌处,同时第一滚轮111越过并从第一限位滑轨2反面下降,通过传感器或摄像头的感应下降位置,再通过第二驱动源的转动,从而可以将编手套运送到承接平台上,而在第二限位滑轨3的作用下,第二滚轮112受力抬起,同样能使活动臂11的夹持臂13打开,而手套在整理机构按压部的固定,被固定在承接平台上;此处第一限位滑轨2的正面是其面向承接平台的一侧。
47.作为优选,第一限位滑轨2的上端设置有一弯曲部21,当活动臂11尾端的第一滚轮111处于弯曲部21时,活动臂11的夹持臂13与固定臂12的夹持臂13处于闭合状态(参考图5)。
48.在对手套夹持前,在编织中的手套可能并不非常平整,因此活动臂11的第一滚轮111处于弯曲部21时,抓取部1处于对手套的夹持状态,当第一滚轮111不越过第一限位滑轨2顶部而是选择往原路下降使,抓取部1的两个夹持臂13对手套有个捋平的动作,从而方便后续的堆叠整理。
49.上述仅为本实用新型的具体实施例,同时凡本实用新型中所涉及的如“上、下、左、右、中间”等词,仅作参考用,并非绝对限定,凡利用本实用新型进行非实质性的改动,均应属于侵犯本实用新型保护范围的行为。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1