一种装配式建筑版钢筋捆扎机器人的制作方法
[0001]
本发明涉及工程机械领域,特别涉及一种装配式建筑版钢筋捆扎机器人。
背景技术:
[0002]
在普遍的钢筋捆扎作业中,主要是通过人工来完成的,这样便会造成工作效率较为低下,并且通过人工来捆扎钢筋,其危险性较高,工作量较大。为了解决这一问题,申请号:cn207277856u公布了一种新型钢筋捆扎装置,该发明在一定程度上解决了钢筋捆扎的工作,但是其结构简单,自动化程度较低。
技术实现要素:
[0003]
针对上述技术问题本发明提供了一种装配式建筑版钢筋捆扎机器人,包括桁架、传动系统、桁架传动、捆扎机械臂,所述桁架固定安装在地面上,传动系统固定安装在桁架上,桁架传动固定安装在桁架上,捆扎机械臂固定安装在桁架传动上。
[0004]
所述桁架包括:立柱、横移电机座、横移电机、卡板、卡座、连杆座、顶挡板、连杆、横梁、横移导轨、横移丝杠、横向立板、连接板、横移滑块、垂向齿条,立柱固定安装在地面上,横移电机座固定安装在立柱上,横移电机固定安装在横移电机座上,卡板固定安装在立柱上,卡座固定安装在立柱上,连杆座固定安装在立柱上,顶挡板固定安装在立柱上,连杆转动安装在连杆座上,横梁固定安装在立柱上,横移导轨固定安装在横梁上,横移丝杠固定安装在横移电机的输出端,横向立板固定安装在连接板上,连接板固定安装在横梁上,横移滑块转动安装在横移丝杠上,垂向齿条滑动安装在立柱上。
[0005]
所述传动系统包括:传动电机、联轴器、输入轴、输入轴承、箱体、大斜齿轮、小直齿轮、输出轴、输出轴承、中间轴承、小斜齿轮、大直齿轮、中间轴,传动电机固定安装在横向立板上,联轴器固定安装在传动电机的输出端,输入轴固定安装在联轴器上,输入轴承转动安装在箱体上,大斜齿轮固定安装在输入轴的端头,小直齿轮固定安装在输出轴上,输出轴转动安装在输出轴承上,输出轴承转动安装在箱体上,中间轴承转动安装在箱体上,小斜齿轮固定安装在中间轴上,并与大斜齿轮相互啮合,大直齿轮固定安装在中间轴上,并与小直齿轮相互啮合,中间轴转动安装在中间轴承上。
[0006]
所述桁架传动包括:传动底座、电气元件、卡轨、纵向传动齿轮、纵向齿条、传感器、固定座、垂向电机座、垂向电机、导向座、导向轮轴、导向轮、垂向传动齿轮、垂向传动输入轴、垂向传动座,传动底座固定安装在横移滑块上,电气元件固定安装在传动底座上,卡轨固定安装在传动底座上,纵向传动齿轮固定安装在输出轴的端头,纵向齿条滑动安装在卡轨上,并与纵向传动齿轮相互啮合,传感器固定安装在传动底座上,固定座固定安装在立柱上,垂向电机座固定安装在立柱上,垂向电机固定安装在垂向电机座上,导向座固定安装在立柱上,导向轮轴转动安装在导向座上,导向轮固定安装在导向轮轴上,垂向传动齿轮固定安装在垂向传动输入轴上,垂向传动输入轴转动安装在垂向传动座上,垂向传动座固定安装在固定座上。,
所述捆扎机械臂包括:底座、配电箱、油缸座、油缸固定销、油缸、基座、油缸头、油缸连接轴、油缸连接座、上摆臂、第一关节轴、侧板、顶板、调整杆、调整座、第二关节轴、腹板、下摆臂、摆臂马达、回转、关节座、执行臂、扭转马达、扭转轴、电缸、捆扎挂钩、止挡、过渡板、止挡销、止挡安装轴、止挡座,底座固定安装在纵向齿条上,配电箱固定安装在底座上,油缸座固定安装在底座上,油缸固定销转动安装在油缸座上,油缸转动安装在油缸固定销上,基座固定安装在底座上,油缸头固定安装在油缸上,油缸连接轴转动安装在油缸头上,油缸连接座转动安装在油缸连接轴上,上摆臂固定安装在油缸连接座上,第一关节轴转动安装在上摆臂上,侧板转动安装在 第一关节轴上,顶板固定安装在侧板上,调整杆转动安装在调整座上 ,调整座固定安装在上摆臂上,第二关节轴转动安装在腹板上,下摆臂转动安装在第一关节轴上,摆臂马达固定安装在执行臂上,回转固定安装在摆臂马达的输出端,关节座转动安装在第一关节轴上,执行臂固定安装在回转上,扭转马达固定安装在执行臂上,扭转轴固定安装在扭转马达的输出端,电缸固定安装在扭转轴上,捆扎挂钩固定安装在电缸上,止挡转动安装在止挡销上,过渡板转动安装在第二关节轴上,止挡销固定安装在止挡安装轴上,止挡安装轴转动安装在止挡座上,止挡座固定安装在关节座上。
[0007]
进一步的,所述的连杆与连杆座通过轴孔形成转动配合。
[0008]
进一步的,所述的横移滑块与横移丝杠通过轴孔形成转动配合。
[0009]
进一步的,所述的输入轴与输入轴承通过轴孔形成滑动配合。
[0010]
进一步的,所述的大斜齿轮与小斜齿轮通过相互啮合形成转动配合。
[0011]
进一步的,所述的小直齿轮与大直齿轮通过相互啮合形成转动配合。
[0012]
进一步的,所述的输出轴与输出轴承通过轴孔形成转动配合。
[0013]
进一步的,所述的纵向齿条与卡轨通过滑槽形成滑动配合。
[0014]
进一步的,所述的油缸与油缸固定销通过轴孔形成转动配合。
[0015]
本发明与现有技术相比的有益效果是:(1)通过采用桁架式的结构来组装该机器人,使得整个装置的稳定性大大提高,保证了安全性能;(2)通过横向、纵向和垂向的多方向的位移调整,使得机械臂在不同方向上进行多维的捆扎;(3)该发明自动化程度高,工作效率高,使用机器人来完成钢筋的捆扎,大大提高了智能化。
附图说明
[0016]
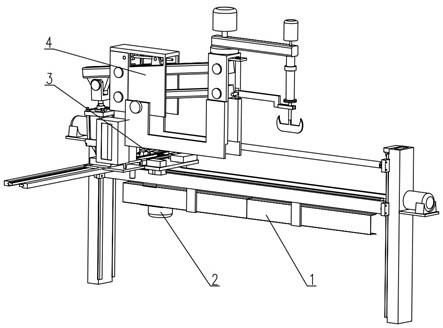
图1为本发明整体示意图。
[0017]
图2为本发明桁架示意图。
[0018]
图3为本发明传动系统示意图。
[0019]
图4为本发明桁架传动示意图。
[0020]
图5为本发明捆扎机械臂示意图。
[0021]
图中:1-桁架;2-传动系统;3-桁架传动;4-捆扎机械臂;101-立柱;102-横移电机座;103-横移电机;104-卡板;105-卡座;106-连杆座;107-顶挡板;108-连杆;109-横梁;110-横移导轨;111-横移丝杠;112-横向立板;113-连接板;114-横移滑块;115-垂向齿条;201-传动电机;202-联轴器;203-输入轴;204-输入轴承;205-箱体;206-大斜齿轮;207-小直齿轮;208-输出轴;209-输出轴承;210-中间轴承;211-小斜齿轮;212-大直齿轮;213-中间轴;301-传动底座;302-电气元件;303-卡轨;304-纵向传动齿轮;305-纵向齿条;306-传
感器;307-固定座;308-垂向电机座;309-垂向电机;310-导向座;311-导向轮轴;312-导向轮;313-垂向传动齿轮;314-垂向传动输入轴;315-垂向传动座;401-底座;402-配电箱;403-油缸座;404-油缸固定销;405-油缸;406-基座;407-油缸头;408-油缸连接轴;409-油缸连接座;410-上摆臂;411-第一关节轴;412-侧板;413-顶板;414-调整杆;415-调整座;416-第二关节轴;417-腹板;418-下摆臂;419-摆臂马达;420-回转;421-关节座;422-执行臂;423-扭转马达;424-扭转轴;425-电缸;426-捆扎挂钩;427-止挡;428-过渡板;429-止挡销;430-止挡安装轴;431-止挡座。
具体实施方式
[0022]
结合具体实施例对本发明作进一步描述,在此发明的示意性实施例以及说明用来解释本发明,但并不作为对本发明的限定。
[0023]
实施例:如图1、图2、图3、图4、图5所示的一种装配式建筑版钢筋捆扎机器人。
[0024]
一种装配式建筑版钢筋捆扎机器人的具体结构如图1所示,其中桁架1固定安装在地面上,传动系统2固定安装在桁架1上,桁架传动3固定安装在桁架1上,捆扎机械臂4固定安装在桁架传动3上。通过将桁架1固定安装在流水线上的地面上,启动传动系统2和桁架传动3,使得捆扎机械臂4在横向、纵向和垂向上分别进行位移和调整。
[0025]
桁架1的具体结构如图2所示,其中立柱101固定安装在地面上,横移电机座102固定安装在立柱101上,横移电机103固定安装在横移电机座102上,卡板104固定安装在立柱101上,卡座105固定安装在立柱101上,连杆座106固定安装在立柱101上,顶挡板107固定安装在立柱101上,连杆108转动安装在连杆座106上,横梁109固定安装在立柱101上,横移导轨110固定安装在横梁109上,横移丝杠111固定安装在横移电机103的输出端,横向立板112固定安装在连接板113上,连接板113固定安装在横梁109上,横移滑块114转动安装在横移丝杠111上,垂向齿条115滑动安装在立柱101上。采用桁架1式的结构使得整个装置的稳定性大大提高,保证了安全性能,横移滑块114与横移丝杠111相互配合使得机器人完成横向的位移调整。
[0026]
传动系统2的具体结构如图3所示,其中传动电机201固定安装在横向立板112上,联轴器202固定安装在传动电机201的输出端,输入轴203固定安装在联轴器202上,输入轴承204转动安装在箱体205上,大斜齿轮206固定安装在输入轴203的端头,小直齿轮207固定安装在输出轴208上,输出轴208转动安装在输出轴承209上,输出轴承209转动安装在箱体205上,中间轴承210转动安装在箱体205上,小斜齿轮211固定安装在中间轴213上,并与大斜齿轮206相互啮合,大直齿轮212固定安装在中间轴213上,并与小直齿轮207相互啮合,中间轴213转动安装在中间轴承210上。通过齿轮传动的结构使得传动系统稳定传动和高效传动。
[0027]
桁架传动3的具体结构如图4所示,其中传动底座301固定安装在横移滑块114上,电气元件302固定安装在传动底座301上,卡轨303固定安装在传动底座301上,纵向传动齿轮304固定安装在输出轴208的端头,纵向齿条305滑动安装在卡轨303上,并与纵向传动齿轮304相互啮合,传感器306固定安装在传动底座301上,固定座307固定安装在立柱101上,垂向电机座308固定安装在立柱101上,垂向电机309固定安装在垂向电机座308上,导向座310固定安装在立柱101上,导向轮轴311转动安装在导向座310上,导向轮312固定安装在导
向轮轴311上,垂向传动齿轮313固定安装在垂向传动输入轴314上,垂向传动输入轴314转动安装在垂向传动座315上,垂向传动座315固定安装在固定座307上。通过纵向传动齿轮304和纵向齿条305的相互啮合形成的转动配合来完成纵向的位移和调整。
[0028]
捆扎机械臂4的具体结构如图5所示,其中底座401固定安装在纵向齿条305上,配电箱402固定安装在底座401上,油缸座403固定安装在底座401上,油缸固定销404转动安装在油缸座403上,油缸405转动安装在油缸固定销404上,基座406固定安装在底座401上,油缸头407固定安装在油缸405上,油缸连接轴408转动安装在油缸头407上,油缸连接座409转动安装在油缸连接轴408上,上摆臂410固定安装在油缸连接座409上,第一关节轴411转动安装在上摆臂410上,侧板412转动安装在 第一关节轴411上,顶板413固定安装在侧板412上,调整杆414转动安装在调整座415上 ,调整座415固定安装在上摆臂410上,第二关节轴416转动安装在腹板417上,下摆臂418转动安装在第一关节轴411上,摆臂马达419固定安装在执行臂422上,回转420固定安装在摆臂马达419的输出端,关节座421转动安装在第一关节轴411上,执行臂422固定安装在回转420上,扭转马达423固定安装在执行臂422上,扭转轴424固定安装在扭转马达423的输出端,电缸425固定安装在扭转轴424上,捆扎挂钩426固定安装在电缸425上,止挡427转动安装在止挡销429上,过渡板428转动安装在第二关节轴416上,止挡销429固定安装在止挡安装轴430上,止挡安装轴430转动安装在止挡座431上,止挡座431固定安装在关节座421上。在捆扎机械臂4上安装的电缸425推动并且转动捆扎挂钩426进行装配式建筑版钢筋的捆扎。
[0029]
使用本发明时,通过将桁架1固定安装在流水线上的地面上,启动传动系统2和桁架传动3,使得捆扎机械臂4在横向、纵向和垂向上分别进行位移和调整。传动系统2以齿轮传动为主要结构,最终将传动力传动给纵向传动齿轮304,通过纵向传动齿轮304和纵向齿条305的相互啮合形成的转动配合来完成纵向的位移和调整。通过垂向传动齿轮313和垂向齿条115的相互啮合形成的转动配合来完成垂向的位移和调整。通过横移丝杠111和横移滑块114的相互配合形成的转动配合来完成横向位置的调整。在捆扎机械臂4上安装的电缸425推动并且转动捆扎挂钩426进行装配式建筑版钢筋的捆扎。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1