一种房屋建筑施工用智能升降平台的制作方法
1.本发明涉及高空建筑施工技术领域,特别涉及一种房屋建筑施工用智能升降平台。
背景技术:
2.建筑施工是指工程建设实施阶段的生产活动,是各类建筑物的建造过程,也可以说是把设计图纸上的各种线条,在指定的地点,变成实物的过程,在建筑施工过程中,施工人员会需要在高处进行作业,从而需要借助脚手架来辅助施工。
3.现有技术中的脚手架在使用过程中不便于移动,无自动移动功能,当需要更换作业位置时,则需要通过人工进行,极为不便,特别是在单人作业时,则需要施工人员从升降平台上下来,然后在移动脚手架,且防护性较差,而且不能向高空运输建筑材料。
4.现有技术(申请号:cn202110541965.1)公开了一种用于房屋建筑施工的升降平台,包括底座框架,底座框架内侧设有主动轴、从动轴,主动轴一侧设有第一动力装置,底座框架内相对应的两侧均固定设有两个连接环,主动轴、从动轴均可转动连接在连接环内侧,主动轴、从动轴一侧均设有车轮轴,车轮轴外侧均固定设有两个车轮。本发明,通过设置车轮轴、车轮、a电动机、主动带轮、从动带轮、起降弯架、a带动杆、b带动杆、带动轴、a螺纹杆、b电动机、支撑板、升降板、a支撑杆、b支撑杆、b螺纹杆、c电动机、u型围栏、防护门,使其具有自动移动、防止意外移动、自动升降、防护等功能。
5.但是该现有技术依旧没有解决向高空运输建筑材料的技术问题,且稳定性较差;所以急需一种房屋建筑施工用智能升降平台。
技术实现要素:
6.针对上述技术问题,本发明采用的技术方案为:一种房屋建筑施工用智能升降平台,包括储料机构、升降机构、支撑机构、棘轮机构。
7.所述储料机构包括储料箱、伸缩杆,储料箱上设置有压杆,伸缩杆顶部滑动安装在储料箱上,压杆驱动伸缩杆在储料箱上滑动;储料机构设置在支撑机构上方,所述支撑机构包括底座、固定丝杆,两个固定丝杆转动安装在底座上,固定丝杆底部转动设置有固定块,固定块滑动安装在底座上,固定丝杆转动带动固定块在底座上滑动,储料机构滑动安装在升降机构上;所述升降机构包括电机支架、升降丝杆,电机支架滑动安装在底座上,升降丝杆底部转动安装在底座上,升降丝杆转动安装在储料箱上,伸缩杆滑动安装在电机支架上的方槽上,伸缩杆控制升降丝杆的转动以驱动储料机构的升降;每个固定丝杆上连接有两组棘轮机构,两组棘轮机构之间有高度差,所述棘轮机构包括棘轮,棘轮固定安装在固定丝杆上,棘轮限制固定丝杆的转动,固定块落地时加固支撑机构的稳定。
8.进一步的,所述储料机构还包括挤压框、推杆,挤压框滑动安装在储料箱上,挤压框的四个角上分别滑动安装有压缩弹簧,压缩弹簧设置在挤压框和压缩弹簧之间,储料箱上设置有滑槽,推杆滑动安装在滑槽上。工作人员压动挤压框,挤压框带动压杆下移,压缩
弹簧压缩,使用完毕后可以使挤压框复位。
9.进一步的,所述储料机构还包括复位弹簧,复位弹簧滑动安装在伸缩杆和滑槽之间,伸缩杆固定安装在推杆端部,所述推杆上设置有斜面,压杆设置在推杆的斜面上方。压杆下移时驱动推杆滑动,推杆推动伸缩杆移动,复位弹簧辅助推杆和推杆的复位。
10.进一步的,所述升降机构还包括电机、从动齿轮,电机固定安装在电机支架上,电机的输出轴上固定安装有主动齿轮,从动齿轮固定安装在升降丝杆上,从动齿轮转动安装在底座上,主动齿轮与从动齿轮啮合。电机带动主动齿轮转动,主动齿轮转动时通过从动齿轮带动升降丝杆转动。
11.进一步的,所述升降机构还包弹簧架、摆杆,弹簧架固定安装在底座上,摆杆转动安装在底座上,弹簧架和电机支架之间设置有拉动弹簧,摆杆设置在弹簧架和电机支架之间。滑杆固定安装在底座上,升降丝杆转动时,滑杆限制储料箱的位置,使储料箱在升降丝杆转动时在滑杆上升降,伸缩杆与方槽咬合时,拉动弹簧处于拉伸状态,伸缩杆脱离与方槽咬合,拉动弹簧拉动电机支架移动,电机支架断开主动齿轮与从动齿轮的啮合,停止储料箱的升降。
12.进一步的,所述支撑机构还包括固定板、转动轴,两个固定板分别固定安装在底座内部的两边,转动轴转动安装在两个固定板和底座上,转动轴上固定安装有从动锥齿轮,升降丝杆底部固定安装有锥齿轮,锥齿轮与从动锥齿轮啮合。升降丝杆带动锥齿轮转动,锥齿轮转动时带动从动锥齿轮转动,从动锥齿轮转动时带动转动轴转动。
13.进一步的,所述支撑机构还包括蜗杆、蜗轮,两个蜗杆固定安装在转动轴的两端,蜗杆转动安装在底座上,固定丝杆转动安装在蜗轮上,蜗轮转动安装在底座上,蜗杆与蜗轮啮合,蜗轮内部设置有螺纹。转动轴转动时,带动两个蜗杆转动,蜗杆转动时通过蜗轮的转动带动固定丝杆升降以及转动,固定丝杆控制固定块的升降。
14.进一步的,所述棘轮机构还包括固定架、棘爪滑板,两个第一组固定架固定安装在固定板的上方,两个第二组固定架固定安装在底座下方;固定架上固定安装有棘爪架,棘爪滑板转动安装在棘爪架上,棘爪滑板与棘轮咬合。蜗轮转动时,在两组棘轮机构的作用下,利用棘轮机构的特性,控制固定丝杆的转动以及升降。
15.进一步的,所述第一组棘轮与第二组棘轮的安装方向相反。第一组棘轮和第二组棘轮辅助配合,控制固定丝杆的转动方向,以及固定丝杆的升降。
16.进一步的,所述棘爪滑板和棘爪架之间设置有扭矩弹簧。扭矩弹簧使棘爪滑板复位,使棘轮的转动方向单一。
17.本发明与现有技术相比的有益效果是:(1)储料机构利用弹簧的复位特性以及机械连动,控制升降,快速准确;(2)升降机构利用齿轮传动,使用一个电机完成机构间的传动,结构紧凑;(3)利用棘轮机构实现固定块的升降,方便固定,构思巧妙;(4)支撑机构方便移动的同时,保证了储料机构的稳定上升,提高了建筑材料以及工作人员的安全性。
附图说明
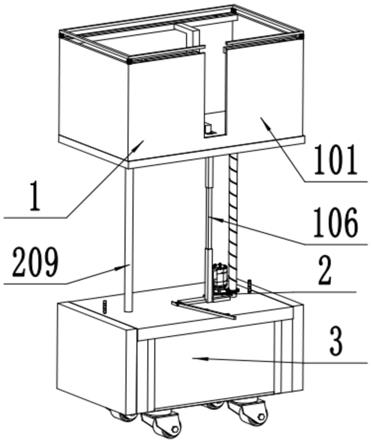
18.图1为本发明整体结构的示意图。
19.图2为本发明部分储料机构的示意图。
20.图3为本发明部分升降机构的示意图。
21.图4为本发明部分升降机构的示意图。
22.图5为本发明部分支撑机构的示意图。
23.图6为本发明部分支撑机构的示意图。
24.图7为本发明棘轮机构分布的示意图。
25.图8为本发明棘轮机构的示意图。
26.附图标号:1-储料机构;101-储料箱;102-压缩弹簧;103-挤压框;104-压杆;105-推杆;106-伸缩杆;107-复位弹簧;10101-滑槽;2-升降机构;201-电机;202-主动齿轮;203-从动齿轮;204-升降丝杆;205-电机支架;206-拉动弹簧;207-弹簧架;208-摆杆;209-滑杆;210-锥齿轮;20501-方槽;3-支撑机构;301-底座;302-滑轮;303-固定板;304-转动轴;305-从动锥齿轮;306-蜗杆;307-固定丝杆;308-固定块;309-蜗轮;4-棘轮机构;401-固定架;402-棘爪架;403-棘爪滑板;404-棘轮。
具体实施方式
27.下面结合附图并通过具体实施方式来进一步说明本发明的技术方案。
28.其中,附图仅用于示例性说明,表示的仅是示意图,而非实物图,不能理解为对本专利的限制;为了更好地说明本发明的实施例,附图某些部件会有省略、放大或缩小,并不代表实际产品的尺寸;对本领域技术人员来说,附图中某些公知结构及其说明可能省略是可以理解的。
29.实施例:如图1、图2、图3、图4、图5、图6、图7、图8所示的一种房屋建筑施工用智能升降平台,包括储料机构1、升降机构2、支撑机构3、棘轮机构4。
30.如图1、2、3所示的储料机构1,储料箱101转动安装在升降丝杆204上,储料箱101滑动安装在滑杆209上,压缩弹簧102滑动安装在储料箱101的四个角上,挤压框103固定安装在四个压缩弹簧102上,压杆104固定安装在挤压框103上,工作人员压动挤压框103,挤压框103带动压杆104下移,压缩弹簧102压缩,使用完毕后可以使挤压框103复位;储料箱101上设置有滑槽10101,推杆105滑动安装在滑槽10101上,推杆105上设置有斜面,压杆104设置在推杆105的斜面上方,压杆104下移时驱动推杆105在滑槽10101上滑动,伸缩杆106固定安装在推杆105端部,复位弹簧107滑动安装在伸缩杆106和滑槽10101之间推杆105移动时推动伸缩杆106移动,复位弹簧107辅助推杆105和推杆105的复位。
31.如图3、4所示的升降机构2,电机201固定安装在电机支架205上,电机支架205滑动安装在底座301上,电机支架205上设置有方槽20501,伸缩杆106底部滑动安装在底座301上,伸缩杆106与方槽20501咬合,弹簧架207固定安装在底座301上,摆杆208转动安装在底座301上,拉动弹簧206固定安装在弹簧架207和电机支架205之间,摆杆208设置在弹簧架207和电机支架205之间,伸缩杆106与方槽20501咬合时,拉动弹簧206处于拉伸状态,推杆105的移动使伸缩杆106脱离与方槽20501咬合,拉动弹簧206拉动电机支架205移动,主动齿轮202固定安装在电机201的输出轴上,从动齿轮203固定安装在升降丝杆204上,从动齿轮203转动安装在底座301上,电机201带动主动齿轮202转动,主动齿轮202与从动齿轮203啮合,主动齿轮202转动时带动从动齿轮203转动,升降丝杆204转动安装在底座301上,滑杆209固定安装在底座301上,储料箱101滑动安装在滑杆209上,从动齿轮203转动时带动升降丝杆204转动,升降丝杆204转动时在滑杆209的限位作用下,使储料箱101在滑杆209上升
降,电机支架205移动时断开主动齿轮202与从动齿轮203的啮合,使升降丝杆204停止转动,以停止储料箱101的升降,如图6所示,锥齿轮210固定安装在升降丝杆204底部,升降丝杆204转动时,带动锥齿轮210转动。
32.如图5、6所示的支撑机构3,滑轮302转动安装在底座301下方,两个固定板303固定安装在底座301内部的两端,转动轴304转动安装在两个固定板303上,从动锥齿轮305固定安装在转动轴304上,从动锥齿轮305与锥齿轮210啮合,升降丝杆204带动锥齿轮210转动时,锥齿轮210带动从动锥齿轮305转动,从动锥齿轮305带动转动轴304转动,两个蜗杆306固定安装在转动轴304两端,蜗杆306转动安装在底座301和固定板303上,转动轴304转动时带动两个蜗杆306转动,固定丝杆307转动安装在支撑机构3储料机构10上,固定丝杆307底部转动安装在固定块308上,固定块308滑动安装在底座301上,蜗轮309转动安装在底座301上,固定丝杆307转动安装在蜗轮309上,蜗杆306与蜗轮309啮合,蜗杆306转动时带动蜗轮309转动,蜗轮309内部设置有螺纹,螺纹与固定丝杆307咬合。
33.如图7、8所示的棘轮机构4,棘轮机构4共有四组,底座301的两端分别安装有两组棘轮机构4,两个第一组固定架401固定安装在固定板303的上方,两个第二组固定架401固定安装在底座301下方;棘爪架402固定安装在固定架401上,棘爪滑板403转动安装在棘爪架402上,棘爪滑板403和棘爪架402之间设置有扭矩弹簧,扭矩弹簧在棘轮404拨动棘爪滑板403摆动时使棘爪滑板403复位,棘轮404组织棘轮404的逆转;棘爪滑板403与棘轮404咬合,棘轮404固定安装在固定丝杆307上,第一组棘轮404与第二组棘轮404的安装方向相反。
34.当蜗轮309顺时针转动时,第一组棘轮404在第一组棘爪滑板403的限制作用下,使固定丝杆307不能转动,此时,第二组棘轮机构4不起作用,蜗轮309内的螺纹与固定丝杆307咬合,驱动固定丝杆307向下移动,固定丝杆307向下移动时带动两组棘轮404在棘爪滑板403上滑动,固定丝杆307带动固定块308向下移动,当固定块308接触到地面时,第一组棘轮404与第一组棘爪滑板403脱离咬合,此时第二组棘轮404与第二组棘爪滑板403仍然咬合,由于第一组棘轮404与第二组棘轮404的安装方向相反,则第二组棘爪滑板403不限制棘轮404的转动,蜗轮309带动固定丝杆307转动,固定丝杆307在底座301和固定块308上转动;当蜗轮309逆时针转动时,第二组棘轮机构4起作用,第二组棘轮404在第二组棘爪滑板403的限制作用下,使固定丝杆307不能转动,此时,第一组棘轮机构4不起作用,蜗轮309内的螺纹与固定丝杆307咬合,驱动固定丝杆307向上移动,固定丝杆307向上移动时带动两组棘轮404在棘爪滑板403上滑动,固定丝杆307带动固定块308向上移动。
35.工作原理:推动底座301,滑轮302转动,将底座301推到目标位置,在储料箱101中放入建筑施工用的建筑材料,此时伸缩杆106与方槽20501咬合,主动齿轮202与从动齿轮203啮合,启动电机201,电机201带动主动齿轮202转动,主动齿轮202转动时带动从动齿轮203转动,从动齿轮203带动升降丝杆204转动,升降丝杆204转动时带动储料箱101在滑杆209上向上移动,伸缩杆106伸长;升降丝杆204转动时带动锥齿轮210转动,锥齿轮210与从动锥齿轮305啮合,锥齿轮210带动从动锥齿轮305转动,从动锥齿轮305转动时带动转动轴304转动,转动轴304转动时带动两端的蜗杆306转动,蜗杆306与蜗轮309咬合,蜗杆306带动蜗轮309转动,假设此时,蜗轮309顺时针转动,第一组棘轮404在第一组棘爪滑板403的限制作用下,使固定丝杆307不能转动,第二组棘轮机构4不起作用,蜗轮309内的螺纹与固定丝杆307咬合,驱动固定丝杆307向下移动,固定丝杆307向下移动时带动两组棘轮404在棘爪
滑板403上滑动,固定丝杆307带动固定块308向下移动,当固定块308接触到地面时,第一组棘轮404与第一组棘爪滑板403脱离咬合,此时第二组棘轮404与第二组棘爪滑板403仍然咬合,第二组棘爪滑板403不限制棘轮404的转动,蜗轮309带动固定丝杆307转动,固定丝杆307在底座301和固定块308上转动,固定块308不再向下移动,两个固定块308加固底座301的稳定,储料箱101继续上升。
36.当储料箱101上升到所需要的高度时,随行的工作人员下压压杆104,压杆104带动挤压框103向下移动,压缩弹簧102压缩,压杆104推动推杆105在滑槽10101上滑动,推杆105推动伸缩杆106在底座301上滑动,复位弹簧107压缩,伸缩杆106断开与方槽20501的咬合,拉动弹簧206收缩,电机支架205带着电机201向弹簧架207方向移动,断开主动齿轮202与从动齿轮203的咬合,升降丝杆204不再转动,停止上升,此时可松开压杆104,复位弹簧107伸长,伸缩杆106推动推杆105在滑槽10101上滑动,压杆104和挤压框103向上移动,压缩弹簧102伸长。
37.建筑材料运送完成后,拨动摆杆208,摆杆208推动电机支架205向从动齿轮203方向移动,直至主动齿轮202与从动齿轮203啮合,伸缩杆106与方槽20501咬合,电机201反向转动,同理,储料箱101在滑杆209上向下移动,伸缩杆106伸长;电机201反向转动时,蜗轮309逆时针转动,第二组棘轮机构4起作用,第二组棘轮404在第二组棘爪滑板403的限制作用下,使固定丝杆307不能转动,此时,第一组棘轮机构4不起作用,蜗轮309内的螺纹与固定丝杆307咬合,驱动固定丝杆307向上移动,固定丝杆307向上移动时带动两组棘轮404在棘爪滑板403上滑动,固定丝杆307带动固定块308向上移动,固定块308收起,结束使用。
38.本发明不局限上述具体实施方式,所属技术领域的技术人员从上述构思出发,不经过创造性的劳动,做出的种种变换,均落在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1