一种精平机器人转向机构的制作方法
1.本实用新型涉及混凝土地面平整作业装置领域,尤其涉及一种精平机器人转向机构。
背景技术:
2.精平机器人是一种可以替代人工进行部分建筑施工作业的智能设备,精平机器人的主要功能是在初凝状态的混凝土地面上进行混凝土地面平整作业,为了能进行大范围的混凝土地面平整作业,精平机器人上一般设置有行走机构和转向机构,由于初凝状态的混凝土地面湿滑且强度较低,常规轮式转向和履带式转向容易出现转向不准,严重破坏混凝土地面的问题。
技术实现要素:
3.为解决精平机器人在初凝状态的混凝土地面上转向时转向不准和严重破坏混凝土地面问题,特提出本实用新型。本实用新型提供了一种精平机器人转向机构,所述转向机构可实现精平机器人原地转向且对地面的破坏较小。
4.实现本实用新型目的的技术方案是:一种精平机器人转向机构,包括行走机构、连杆支撑平台和回转平台,所述行走机构与连杆支撑平台通过回转平台连接,行走机构相对连杆支撑平台转动;所述连杆支撑平台包括设于回转平台上的安装底座,所述安装底座上设有连杆支撑机构和直线驱动模组,所述直线驱动模组驱动所述连杆支撑机构进行张合运动。
5.作为优选,所述连杆支撑机构包括与直线驱动模组滑动连接的驱动板和设于驱动板上对称设置的数个连杆装置,每一所述连杆装置包括驱动连杆、摆臂、连接板、方向控制连杆和连杆底座,所述驱动连杆一端与驱动板铰接,驱动连杆另一端铰接有摆臂,所述摆臂设有第一铰接点、第二铰接点和第三铰接点,所述驱动连杆另一端通过第一铰接点与摆臂铰接,所述连接板一端连接至第二铰接点处,连接板另一端与方向控制连杆一端铰接,所述方向控制连杆另一端与设置在安装底座上的连杆底座一端铰接,所述连杆底座另一端连接至所述第三铰接点处,所述连杆装置还包括设于连接板远离直线驱动模组一端的可支撑于地面的支撑脚。
6.作为优选,所述摆臂、连接板、方向控制连杆、连杆底座组成平行四边形机构。
7.作为优选,所述驱动板、驱动连杆、摆臂、直线驱动模组组成直线摇杆机构。
8.作为优选,所述回转平台包括通过轴承连接的内圈和外圈,所述安装底座与其中一个圈固接,行走机构与另一圈固接。
9.采用了上述技术方案,本实用新型具有以下的有益效果:(1)本实用新型可实现精平机器人原地转向且对地面的破坏较小。
10.(2)本实用新型采用连杆支撑机构与行走机构采用转台连接,确保连接稳定可靠,能承受较大偏载。
11.(3)使用连杆支撑机构来实现支撑作用,可以使精平机器人在工作时收缩成体积较小的状态,仅在转向时展开,大大节省占地空间。
12.(4)本技术只用到直线驱动模组一个电机,既可以实现机构的张开,使机构整体举升,在这个过程中,又同时控制了驱动力的合理分配,同时机构死点状态可以降低对驱动的要求,解决现有技术如果需要实现多功能,需要用到多个驱动力的技术问题。
13.(5)本实用新型的连杆装置采用左右对称布置,可以使用一个直线驱动模组来实现两侧同时动作,并确保了两侧支撑脚支撑动作的同步,确保了精平机器人在撑起时的平稳状态。
14.(6)所述直线摇杆机构将直线方向的驱动力转换为转动驱动力并对机构运动速度进行分配,极大降低了对驱动系统的要求。
15.(7)所述平行四边形机构实现了对支撑脚的姿态控制,确保支撑脚的支撑面始终平行于地面。
附图说明
16.为了使本实用新型的内容更容易被清楚地理解,下面根据具体实施例并结合附图,对本实用新型作进一步详细的说明,其中
17.图1为本实用新型的结构示意图;
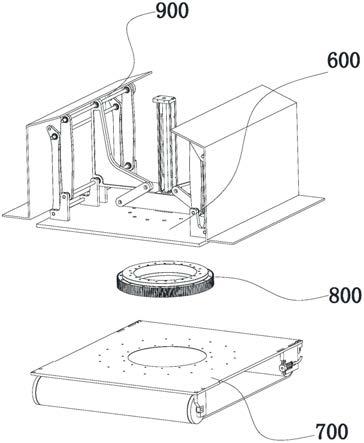
18.图2为图1爆炸图;
19.图3为本实用新型中连杆支撑机构收缩的主视图;
20.图4为本实用新型的部分结构示意图;
21.图5为连杆支撑机构半展开的结构示意图;
22.图6为连杆支撑机构全部展开的结构示意图。
具体实施方式
23.实施例一
24.见图1至图6,本实施例的精平机器人转向机构,一种精平机器人转向机构,包括行走机构700、连杆支撑平台900和回转平台800,所述行走机构700与连杆支撑平台900通过回转平台800连接,行走机构700相对连杆支撑平台900转动;所述连杆支撑平台900包括设于回转平台800上的安装底座600,所述安装底座600上设有连杆支撑机构400和直线驱动模组403,所述直线驱动模组403驱动所述连杆支撑机构400进行张合运动。所述直线驱动模组403提供连杆支撑机构400展开支撑和缩回的动力,直线驱动模组403上的输出滑块与连杆支撑机构900固定来接,所述直线驱动模组403可采用现有技术公开的直线驱动模组机构即可,因而对其具体结构组成不做赘述。
25.所述连杆支撑机构400包括与直线驱动模组403滑动连接的驱动板404和设于驱动板404上对称设置的数个连杆装置,每一所述连杆装置包括驱动连杆405、摆臂402、连接板406、方向控制连杆407和连杆底座408,所述驱动连杆405一端与驱动板404铰接,驱动连杆405另一端铰接有摆臂402,所述摆臂402设有第一铰接点409、第二铰接点410和第三铰接点411,所述驱动连杆405另一端通过第一铰接点409与摆臂402铰接,所述连接板406一端连接至第二铰接点410处,连接板406另一端与方向控制连杆407一端铰接,所述方向控制连杆
407另一端与设置在安装底座600上的连杆底座408一端铰接,所述连杆底座408另一端连接至所述第三铰接点411处,所述连杆装置还包括设于连接板远离直线驱动模组一端的可支撑于地面的支撑脚401。
26.本技术中,所有铰接处均可相对转动。本技术采用连杆支撑机构400来实现支撑作用,可以使精平机器人在工作时收缩成体积较小的状态,仅在转向时展开,大大节省占地空间,且确保连接稳定可靠,能承受较大偏载。所述连杆支撑机构400由直线摇杆机构和平行四边形机构等联合组成,所述摆臂402、连接板406、方向控制连杆407、连杆底座408组成平行四边形机构。所述驱动板404、驱动连杆405、摆臂402、直线驱动模组403组成直线摇杆机构。直线摇杆机构将直线方向的驱动力转换为转动驱动力并对机构运动速度进行分配(开始展开时力小,运动速度快;支撑时负载大,运动速度慢;这样降低了对驱动系统的要求),平行四边形机构实现了对支撑脚401的姿态控制,确保支撑脚401的支撑面始终平行于地面。直线摇杆机构在支撑状态时处于机构死点状态(即驱动板406与驱动连杆405处于同一平行直线,驱动连杆405的两个铰接点处于同一水平),即在撑起状态精平机器人转向时,连杆驱动系统不需要很大的保持力,甚至可以待机,降低了对驱动系统的要求,同时也提高了驱动系统的使用寿命。
27.所述回转平台800包括通过轴承连接的内圈和外圈,所述安装底座600与其中一个圈固接,行走机构700与另一圈固接。所述内圈和外圈的相对转动,带动所述安装底座600和行走机构700的相对转动。
28.具体实施时,所述转向机构在精平机器人需要转向时,首先直线驱动模组403驱动连杆支撑机构400展开将安装底座600撑起,带动行走机构700离开混凝土地面,然后回转平台驱动电机,通过齿轮或其他方式驱动回转平台800,带动行走机构700回转到指定角度,最后连杆支撑机构400收缩将转向后的安装底座600及其上的行走机构700等放下。支撑脚401在撑起精平机器人时,支撑脚的运动状态接近向下的直线运动,即向下移动75mm,水平移动3mm,接近向下的直线运动,对地面的破坏较小,经实验论证,支撑脚在上下高度相差75mm时,水平位置变动仅3mm。
29.以上所述的具体实施例,对本实用新型的目的、技术方案和有益效果进行了进一步详细说明,所应理解的是,以上所述仅为本实用新型的具体实施例而已,并不用于限制本实用新型,凡在本实用新型的精神和原则之内,所做的任何修改、等同替换、改进等,均应包含在本实用新型的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1