适用于空心薄壁墩的智能同步提升滑模系统及施工方法与流程
本发明属于超高墩混凝土施工,特别涉及一种适用于空心薄壁墩的智能同步提升滑模系统及施工方法。
背景技术:
1、目前国内外关于超高墩施工技术大体上可分为以下几种:爬模施工、翻模施工、滑模施工。爬模技术的应用主要是利用液压系统实现爬架与模板体系沿着导轨的爬升。爬模技术的应用虽然能够提高施工的速度,成本相对较小,但构造复杂,较滑模相比,施工速度较慢。翻模技术主要是借助塔吊完成模板循环交替上升施工。翻膜技术的应用具有简单的优点,在施工完成之后,墩身表面相对较为平滑,但是施工速度相对较慢。滑模技术是预先在混凝土结构内埋置钢管,利用千斤顶、提升架,将滑升的模板施工荷载转至支撑杆,等到混凝土达到一定强度之后,利用液体提升系统支撑,提升整个装置,以此实现循环作业。
2、综上所述,滑模施工工艺施工效率最高,但是仍然存在一下问题:
3、1、目前的滑模施工均需要连续施工,模板必须在墩身上保持滑动,若遇上不可抗因素,导致施工中断,混凝土凝固,模板紧贴已浇筑混凝土,将无法继续滑升,需重新拆除滑模系统,再进行组装。
4、2、常规滑模施工模板水平位置的控制,需要测量人员使用全站仪进行测量,每次测量均需测量人员到达滑模系统操作平台,测量工作效率较低,且安全风险等级较高。
5、3、液压提升系统采用人工控制,但是在滑模施工过程中,需要多个千斤顶同步提升,每个千斤顶的提升速度直接影响模板的垂直度,而人为控制多个千斤顶很难保证其速度相同,容易导致卡模和模板倾斜。
技术实现思路
1、鉴于背景技术所存在的技术问题,本发明所提供的适用于空心薄壁墩的智能同步提升滑模系统及施工方法,本发明具有进退模功能,提高了施工的灵活性,遇到不可抗因素导致停止施工时间过长,模板将无法滑动时,本装置可将模板退出混凝土面,然后再进行爬升,避免了连续施工导致工人疲劳引起的施工风险,同时也节省了拆装模板的施工时间,避免了高空组装滑模系统带来的风险。
2、为了解决上述技术问题,本发明采取了如下技术方案来实现:
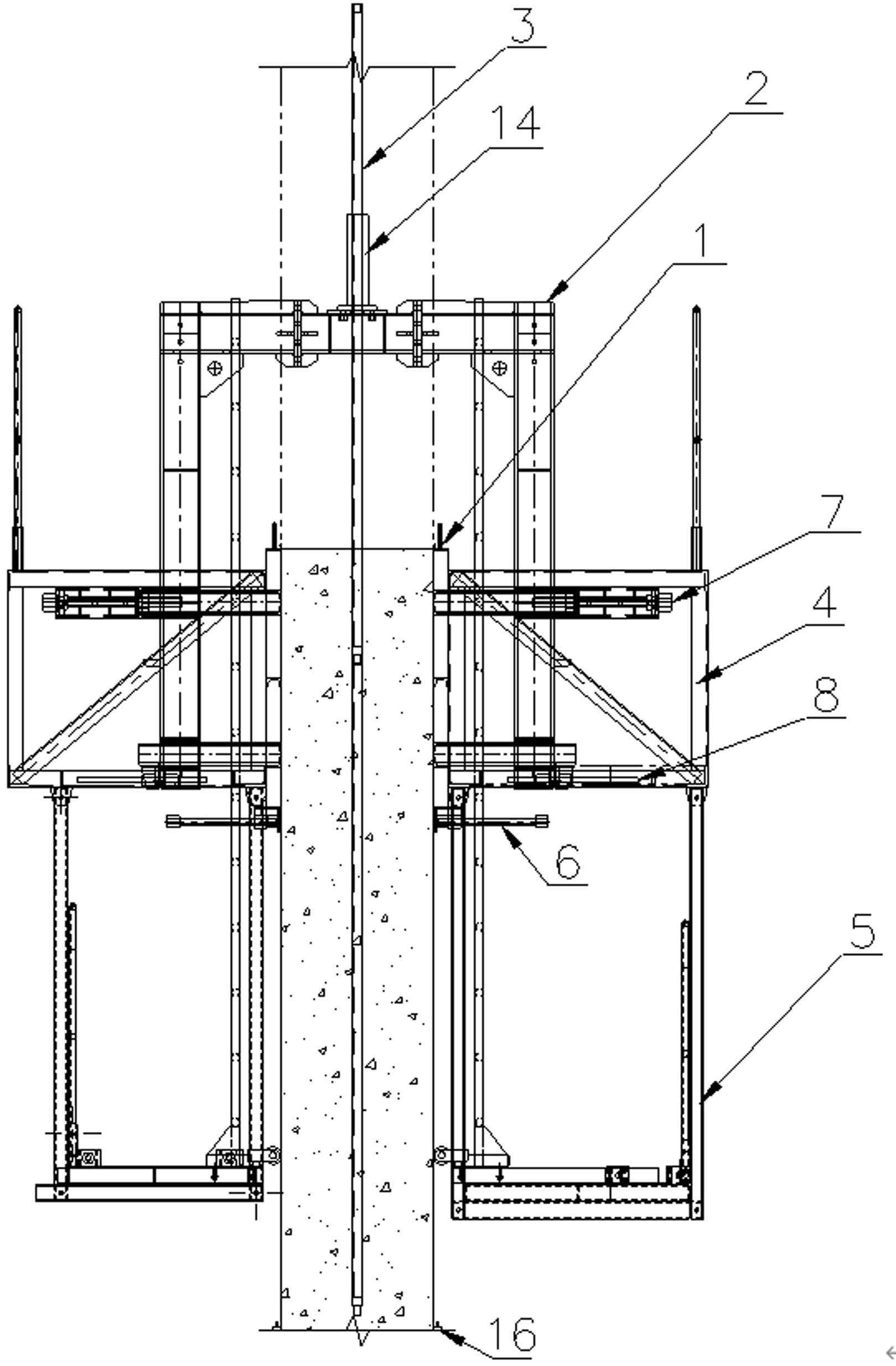
3、一种适用于空心薄壁墩的智能同步提升滑模系统,包括模板系统,模板系统包括多个内模和多个外模,其特征在于:内模和外模分别与连接丝杆连接,连接丝杆与提升架连接,提升架通过提升装置与支撑杆连接,支撑杆用于预埋在墩身钢筋中;模板系统与施工平台连接,施工平台与提升架连接;模板系统下沿设有顶紧机构,顶紧机构安装在施工平台或提升架上;施工平台上设有标靶,标靶与激光垂准仪相适配;液压千斤顶由一体化泵站供油。
4、优选的方案中,所述的提升装置为液压千斤顶,液压千斤顶的底座与提升架连接,液压千斤顶的活动端与支撑杆连接。
5、优选的方案中,所述的液压千斤顶与一体化泵站通过液压油路连接;每个液压千斤顶单独采用压力控制阀进行调控。
6、优选的方案中,所述的施工平台下方设有辅助平台。
7、优选的方案中,所述的施工平台包括内侧施工平台单元和外侧施工平台单元,内侧施工平台单元与内模连接,外侧施工平台单元与外模连接;内侧施工平台单元和外侧施工平台单元均与提升架连接。
8、优选的方案中,所述的内模包括四块边内膜和四块倒角内模,外模包括四块边外膜和四块倒角外模。
9、优选的方案中,所述的适用于空心薄壁墩的智能同步提升滑模系统的施工方法,包括以下步骤:
10、s1:施工准备:准备用于安装智能同步提升滑模系统的结构件;
11、s2:将支撑杆预埋进墩身钢筋中,然后安装提升架,再安装液压千斤顶,将液压千斤顶底座与提升架连接,将液压千斤顶的活动端与支撑杆连接;
12、s3:安装模板系统:将提升架与模板系统通过连接丝杆连接;
13、s4:安装施工平台:将施工平台与模板系统连接,然后将施工平台与提升架连接,再安装顶紧机构;
14、s5:将各个外侧施工平台单元进行连接,将各个内侧施工平台单元进行连接;
15、s6:安装自动液压爬模控制系统:将液压千斤顶与一体化泵站通过液压油路连接;然后安装倾角测量仪器,倾角测量仪器用于实时监测施工平台倾斜角度数据,当施工平台倾角超过预警值时,一体化泵站通过调整油压使施工平台达到水平;
16、s7:当模板系统爬升一定高度之后安装辅助平台,将辅助平台与施工平台连接;
17、s8:在墩身两侧对称布置激光垂准仪,激光垂准仪和标靶相适配,标靶安装在施工平台上,激光垂准仪和标靶用于确定模板系统的偏位走向;
18、s9:在钢筋绑扎完成之后,启动液压千斤顶,在液压千斤顶作用下,带动滑模系统沿支承杆向上进行爬升一段距离后停止爬升,然后进行混凝土浇筑、和上层钢筋绑扎施工,依次循环至墩柱施工完成;
19、s10:退模时,将各个外侧施工平台单元和各个内侧施工平台单元的连接件拆除,拆除施工平台与提升架之间的连接件;调节连接丝杆使内模退出,收拢内侧施工平台单元,利用内模下沿的顶紧机构顶紧已浇筑的混凝土表面;调节连接丝杆使外模退出,收拢外侧施工平台单元;利用外模下沿的顶紧机构顶紧已浇筑的混凝土表面;
20、s11:待滑模系统退出之后,安装临时支撑;
21、s12:启动液压千斤顶,将模板系统滑升至施工位置,再进行合模,合模顺序与退模顺序相反,然后进行钢筋绑扎和模板滑升和混凝土浇筑,循环施工直至墩身施工完成。
22、优选的方案中,所述的步骤s2中,墩身水平钢筋绑扎高度大于1.2m且小于2.1米的时,将支撑杆预埋进墩身钢筋中,然后安装提升架。
23、优选的方案中,所述的步骤s4中,将施工平台与提升架通过精轧螺纹钢连接;将施工平台与模板系统焊接;内侧施工平台单元与内模焊接,外侧施工平台单元与外模焊接。
24、优选的方案中,所述的步骤s5中,外侧施工平台单元之间使用施工平台连接螺栓连接,内侧施工平台单元之间使用内模连接角钢连接。
25、本专利可达到以下有益效果:
26、1、本发明具有进退模功能,提高了施工的灵活性,遇到不可抗因素导致停止施工时间过长,模板将无法滑动时,本装置可将模板退出混凝土面,然后再进行爬升,避免了连续施工导致工人疲劳引起的施工风险,同时也节省了拆装模板的施工时间,避免了高空组装滑模系统带来的风险。
27、2、本发明具有多点同步提升、自动倾角监测及控制等能力,可自动调整模板垂直度,无需人为操作;有效地控制了模板的偏位。同时降低了混凝土与模板间的摩阻力,提高了混凝土外观质量。
28、3、本发明激光标靶测控装置规避了测量仪器换站次数和人员路途折返,有助于提高测量效率,特别是在山区地段,道路不通畅时,效率提升效果更为明显;同时解决了由于结构物模板对测量视线的遮挡,需要重复设站的问题。
29、4、本发明校核方法有使用直观、操作方便、实时监测的优点;使用本方法可以在墩身的轴线、角点或者任意对称方向使用,成对布设,不受骨架横竖筋带来的视线影响;成对布设标靶上的两个激光点可以直观显示模板的偏位,反映墩柱的垂直度。本校核方法的应用大大的提高了现场作业的工作效率,随看随调随量,规避了人员攀爬作业的安全风险,大大减少了人员设备成本投入。
30、5、本智能同步提升滑模系自动化程度、施工高效、安全可靠、运用前景好,显示出了良好的技术特点和优越的经济性能,具有极大的推广价值。
- 还没有人留言评论。精彩留言会获得点赞!