一种室内建筑模板拆除装置的制作方法
1.本发明涉及一种拆除装置,尤其涉及一种室内建筑模板拆除装置。
背景技术:
2.建筑模板是一种临时性支护结构,按设计要求制作,使混凝土结构、构件按规定的位置、几何尺寸成形,保持其正确位置,并承受建筑模板自重及作用在其上的外部荷载,进行模板工程的目的,是保证混凝土工程质量与施工安全、加快施工进度和降低工程成本,在后期,需要对建筑模板进行拆除。
3.专利申请cn213115525u,公开日为20210504,公开了一种建筑模板拆除装置,包括底板,所述底板的顶面固定有立柱,在所述立柱的顶端安装有可调节高度的水平支撑组件,在所述立柱的外侧面固定有连接架,在所述连接架的端部铰接有竖直支撑组件;所述水平支撑组件和所述竖直支撑组件均包括支撑板,在所述支撑板表面活动安装有两个对称分布的托板;本发明的建筑模板拆除装置,使用方便,分别通过水平支撑组件和竖直支撑组件对需要拆除的建筑模板进行稳定,避免在拆除过程中建筑模板意外掉落,避免建筑模板损坏和意外伤人,并且,水平支撑组件的高度可调,竖直支撑组件的倾斜角度可调,大大提高了装置的适用范围。虽然上述专利便于对拆卸下的建筑模板起到支撑的作用,避免建筑模板发生高空掉落,提高安全性,但是上述专利不便移动,需要人们上述装置搬运到需要使用的位置上,如此不方便人们使用,降低拆除效率。
4.鉴于上述问题提供一种便于移动,减少人们搬运,提高拆除效率的室内建筑模板拆除装置。
技术实现要素:
5.为了克服上述专利不便移动,需要人们将上述装置搬运到需要使用的位置上,如此不方便人们使用,降低拆除效率的缺点,本发明的技术问题是:提供一种便于移动,减少人们搬运,提高拆除效率的室内建筑模板拆除装置。
6.本发明的技术特征在于:一种室内建筑模板拆除装置,包括:固定座,底板顶部设有固定座;第一支撑座,固定座顶部设有第一支撑座;滑动块,第一支撑座左右两侧均滑动式设有滑动块,两个滑动块均与固定座滑动式连接;双轴电机,第一支撑座内部安装有双轴电机;第一螺杆,双轴电机的两侧输出轴上均设有第一螺杆,两个第一螺杆均与同侧的滑动块螺纹式连接;第二支撑座,固定座顶部设有第二支撑座,第一支撑座位于第二支撑座的内下部;滑动平台,第二支撑座上滑动式设有滑动平台;升降架,两个滑动块前后两侧之间均转动式设有升降架,两个升降架均与滑动平
台转动式连接;固定板,滑动平台右侧设有固定板;滑动板固定板顶部滑动式设有滑动板;回力弹簧,滑动板与固定板之间设有两个回力弹簧;电动滑轨,固定板顶部前后两侧均安装有电动滑轨;电动滑块,两个电动滑轨右侧均通过移动件设有电动滑块;铲除板,两个电动滑块左侧之间设有铲除板;移动机构,底板上设有用于辅助室内建筑模板拆除装置进行移动的移动机构;辅助机构,底板上设有用于辅助移动机构进行收起的辅助机构,辅助机构与移动机构配合;支撑机构,滑动平台顶部设有用于对拆卸下的建筑模板进行抵住的支撑机构。
7.进一步的是,移动机构包括:旋转座,底板前后两侧均左右两侧转动式设有旋转座,旋转座共有四个;定位孔,四个旋转座上均开有两个定位孔;万向轮,四个旋转座上均转动式设有万向轮;第一扭力弹簧,四个旋转座与底板之间均设有两个第一扭力弹簧,第一扭力弹簧共有八个;顶杆,底板左右两侧均前后两侧滑动式设有顶杆,顶杆共有四个,四个顶杆与同侧的定位孔卡紧;复位弹簧,四个顶杆与底板之间均设有复位弹簧,复位弹簧共有四个。
8.进一步的是,辅助机构包括:踏板,底板顶部左右两侧均前后两侧滑动式设有踏板,踏板共有四个;缓冲弹簧,四个踏板与底板之间均设有两个缓冲弹簧,缓冲弹簧共有八个;楔形块,四个踏板内侧面均设有楔形块;第一连接杆,四个顶杆外侧均设有两个第一连接杆,第一连接杆共有八个,四个楔形块均与同侧的两个第一连接杆接触。
9.进一步的是,支撑机构包括:限位块,滑动平台顶部前后两侧均通过螺栓连接的方式安装有限位块;移动块,两个限位块内侧面的左右两侧均滑动式设有移动块,移动块共有四个;支撑筒四个移动块顶部均设有支撑筒。
10.进一步的是,还包括有吸附机构,吸附机构包括:吸盘,四个支撑筒内上部均滑动式设有吸盘;连接弹簧,四个吸盘与同侧的支撑筒之间均设有两个连接弹簧;导向架,四个移动块顶部均设有导向架;导向环四个导向架下部均滑动式设有导向环;球阀,四个导向环上均转动式设有球阀,四个球阀均与同侧的吸盘转动式连接;第二扭力弹簧,四个球阀与同侧的导向环之间均设有第二扭力弹簧;固定杆,四个支撑筒中部均设有固定杆,四个固定杆向下侧移动均与同侧的球阀接触。
第二支撑座,8-滑动平台,9-升降架,11-固定板,12-滑动板,13-电动滑轨,130-电动滑块,14-铲除板,15-回力弹簧,16-移动机构,160-万向轮,161-旋转座,162-第一扭力弹簧,163-顶杆,164-复位弹簧,165-定位孔,17-辅助机构,170-踏板,171-缓冲弹簧,172-楔形块,173-第一连接杆,18-支撑机构,180-限位块,181-移动块,182-支撑筒,19-吸附机构,190-吸盘,191-球阀,192-导向环,193-导向架,194-第二扭力弹簧,195-固定杆,196-连接弹簧,20-调节机构,200-伺服电机,201-第二螺杆,202-转盘,203-第二连接杆,21-防尘机构,210-支撑架,211-旋转件,212-发条,213-防尘帘,214-连接块,215-转杆,216-卡杆。
具体实施方式
32.为使本发明的目的、技术方案和优点更加清楚,下面将结合附图对本发明作进一步地详细描述。仅此声明,本发明在文中出现或即将出现的上、下、左、右、前、后、内、外等方位用词,仅以本发明的附图为基准,其并不是对本发明的具体限定。
33.实施例1一种室内建筑模板拆除装置,如图1-图9所示,包括有底板1、固定座2、第一支撑座3、滑动块4、双轴电机5、第一螺杆6、第二支撑座7、滑动平台8、升降架9、固定板11、滑动板12、电动滑轨13、电动滑块130、铲除板14、回力弹簧15、移动机构16、辅助机构17和支撑机构18,底板1顶部设有固定座2,固定座2顶部设有第一支撑座3,第一支撑座3左右两侧均滑动式设有滑动块4,两个滑动块4均与固定座2滑动式连接,第一支撑座3内部安装有双轴电机5,双轴电机5的两侧输出轴上均设有第一螺杆6,两个第一螺杆6均与同侧的滑动块4螺纹式连接,固定座2顶部设有第二支撑座7,第一支撑座3位于第二支撑座7的内下部,第二支撑座7上滑动式设有滑动平台8,两个滑动块4前后两侧之间均转动式设有升降架9,两个升降架9均与滑动平台8转动式连接,滑动平台8右侧设有固定板11,固定板11顶部滑动式设有滑动板12,滑动板12与固定板11之间设有两个回力弹簧15,固定板11顶部前后两侧均安装有电动滑轨13,两个电动滑轨13右侧均通过移动件设有电动滑块130,两个电动滑块130左侧之间设有铲除板14,用于对建筑模板进行拆除,底板1上设有移动机构16,用于辅助室内建筑模板拆除装置进行移动,底板1上设有辅助机构17,辅助机构17与移动机构16配合,用于辅助移动机构16进行收起,滑动平台8顶部设有支撑机构18,用于对拆卸下的建筑模板进行抵住,避免建筑模板高空掉落。
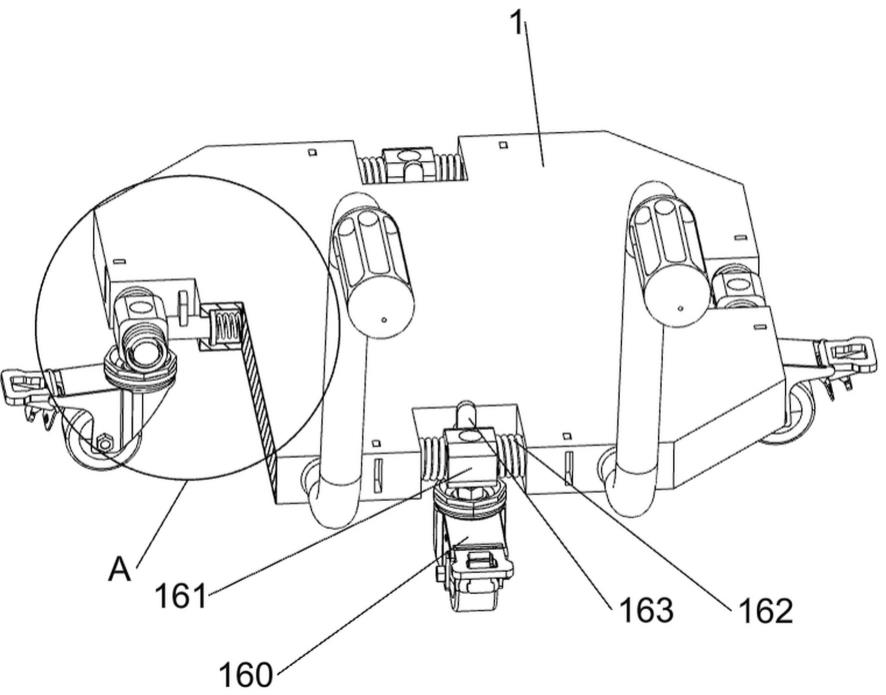
34.如图1、图4、图5和图6所示,移动机构16包括有万向轮160、旋转座161、第一扭力弹簧162、顶杆163、复位弹簧164和定位孔165,底板1前后两侧均左右两侧转动式设有旋转座161,旋转座161共有四个,四个旋转座161上均开有两个定位孔165,四个旋转座161上均转动式设有万向轮160,四个旋转座161与底板1之间均设有两个第一扭力弹簧162,第一扭力弹簧162共有八个,底板1左右两侧均前后两侧滑动式设有顶杆163,顶杆163共有四个,四个顶杆163与同侧的定位孔165卡紧,四个顶杆163与底板1之间均设有复位弹簧164,复位弹簧164共有四个,底板1右侧面的前后两侧均设有把手,把手用于人们推动把手打带动底板1进行移动。
35.如图1、图7和图8所示,辅助机构17包括有踏板170、缓冲弹簧171、楔形块172和第一连接杆173,底板1顶部左右两侧均前后两侧滑动式设有踏板170,踏板170共有四个,四个踏板170上均设置有防滑纹,用于人们对踏板170施加作业时,防滑纹能够起到防滑的作用,
四个踏板170与底板1之间均设有两个缓冲弹簧171,缓冲弹簧171共有八个,四个踏板170内侧面均设有楔形块172,四个顶杆163外侧均设有两个第一连接杆173,第一连接杆173共有八个,四个楔形块172均与同侧的两个第一连接杆173接触。
36.如图1和图9所示,支撑机构18包括有限位块180、移动块181和支撑筒182,滑动平台8顶部前后两侧均通过螺栓连接的方式安装有限位块180,两个限位块180内侧面的左右两侧均滑动式设有移动块181,移动块181共有四个,四个移动块181顶部均设有支撑筒182,支撑筒182用于对拆卸下的建筑模板进行支撑。
37.当人们需要使用室内建筑模板拆除装置时,人们推动把手带动底板1通过万向轮160在地面上进行移动,从而将本装置移动至需要使用的位置后,人们便停止推动把手,使得万向轮160停止转动,之后人们脚踩踏板170,踏板170沿底板1向下侧移动,缓冲弹簧171被压缩,踏板170带动楔形块172向下侧移动,楔形块172挤压第一连接杆173向内侧移动,第一连接杆173带动顶杆163向内侧移动,复位弹簧164被压缩,顶杆163向内侧移动至与旋转座161上的定位孔165脱离接触,然后人们将本装置进行搬起,使得万向轮160与地面脱离接触,第一扭力弹簧162的初始状态呈形变状态,在第一扭力弹簧162的复位作用下,旋转座161带动万向轮160转动收起,接着人们将本装置放置在地面上,万向轮160收起后,本装置便无法随意移动,随后人们不再对踏板170施加力,并将脚部与踏板170脱离接触,在缓冲弹簧171的复位作用下,踏板170沿底板1向上侧移动,踏板170带动楔形块172向上侧移动与第一连接杆173脱离接触,在复位弹簧164的复位作用下,顶杆163带动第一连接杆173向外侧移动,顶杆163向外侧移动至与旋转座161上的另一个定位孔165接触,从而顶杆163对旋转座161进行卡紧,避免旋转座161随意转动,使得本装置更加稳固,随后人们移动支撑筒182带动移动块181沿限位块180向外侧移动,将支撑筒182向外侧移动至适宜的位置,便于支撑筒182对不同大小的建筑模板起到支撑,然后人们启动双轴电机5,控制双轴电机5输出轴正转,双轴电机5输出轴带动第一螺杆6转动,第一螺杆6使得滑动块4沿第一支撑座3向内侧移动,滑动块4向内侧移动过程中带动升降架9转动,升降架9带动滑动平台8向上侧移动升起,滑动平台8带动固定板11和限位块180向上侧移动,限位块180带动移动块181向上侧移动,移动块181带动支撑筒182向上侧移动,固定板11带动滑动板12向上侧移动,滑动板12带动电动滑轨13向上侧移动,电动滑轨13带动电动滑块130向上侧移动,电动滑块130带动铲除板14向上侧移动至与建筑模板接触,建筑模板能够从铲除板14中穿过,回力弹簧15起到缓冲的作用,这时人们便关闭双轴电机5,然后人们便启动电动滑轨13,电动滑块130沿电动滑轨13向左侧移动,电动滑块130带动铲除板14向左侧移动,从而铲除板14将建筑模板进行拆下,使得建筑模板与墙体脱离接触,脱落下的建筑模板掉落到支撑筒182上,支撑筒182对建筑模板起到支撑的作用,避免脱落下的建筑模板直接掉落到地面上,造成高空掉落的危险,进而提高安全性,同时能够避免建筑模板损坏,之后电动滑块130带动铲除板14向右侧移动复位,人们关闭电动滑轨13,接着人们启动双轴电机5,控制双轴电机5输出轴反转,双轴电机5输出轴带动第一螺杆6反转,第一螺杆6反转使得滑动块4沿第一支撑座3向外侧移动,滑动块4向外侧移动过程中带动升降架9向下侧移动,升降架9带动滑动平台8向下侧移动,滑动平台8带动固定板11向下侧移动,固定板11带动滑动板12向下侧移动,滑动板12带动电动滑轨13向下侧移动,电动滑轨13带动电动滑块130向下侧移动,电动滑块130便带动铲除板14向下侧移动,同时滑动平台8带动限位块180向下侧移动,限位块180带动移动块181向下
侧移动,移动块181便带动支撑筒182向下侧移动,支撑筒182带动建筑模板向下侧移动与第二支撑座7接触,第二支撑座7对建筑模板起到支撑的作用,支撑筒182继续向下侧移动与建筑模板脱离接触,人们便关闭双轴电机5,然后人们将第二支撑座7上的建筑模板进行取下,并且人们推动支撑筒182带动移动块181沿限位块180向内侧移动,之后人们踩压踏板170向下移动,缓冲弹簧171被压缩,踏板170带动楔形块172向下侧移动,楔形块172挤压第一连接杆173向内侧移动,第一连接杆173带动顶杆163向内侧移动,复位弹簧164被压缩,顶杆163向内侧移动与旋转座161上的定位孔165脱离接触,接着人们便将本装置进行搬运起,使得底板1与地面脱离接触,这时人们便反向转动旋转座161,第一扭力弹簧162发生形变,旋转座161带动万向轮160反向转动至与地面接触,然后人们脚部移开与踏板170脱离接触,在缓冲弹簧171的复位作用下,踏板170带动楔形块172向上侧移动与第一连接杆173脱离接触,在复位弹簧164的复位作用下,顶杆163带动第一连接杆173向外侧移动复位,顶杆163向外侧移动至与旋转座161上的定位孔165接触,从而顶杆163对旋转座161上的定位孔165进行卡紧,使得旋转座161无法随意转动,人们松开本装置,并推动把手带动底板1通过万向轮160在地面上进行移动,进而将本装置移动至返回原位,之后人们停止推动把手,使得万向轮160停止转动,最终便可实现对建筑模板进行拆除,无需人们手动对建筑模板进行拆除,拆除效率高,同时能够对拆卸下的建筑模板起到支撑的作用,避免拆卸下的建筑模板发生高空掉落,对人们的安全造成影响,同时能够防止建筑模板损坏。
38.实施例2在实施例1的基础之上,如图1、图10、图11和图12所示,还包括有吸附机构19,吸附机构19包括有吸盘190、球阀191、导向环192、导向架193、第二扭力弹簧194、固定杆195和连接弹簧196,四个支撑筒182内上部均滑动式设有吸盘190,吸盘190用于对脱落下的建筑模板进行吸附,四个吸盘190与同侧的支撑筒182之间均设有两个连接弹簧196,四个移动块181顶部均设有导向架193,四个导向架193下部均滑动式设有导向环192,四个导向环192上均转动式设有球阀191,四个球阀191均与同侧的吸盘190转动式连接,四个球阀191与同侧的导向环192之间均设有第二扭力弹簧194,四个支撑筒182中部均设有固定杆195,四个固定杆195向下侧移动均与同侧的球阀191接触。
39.当铲除板14将建筑模板进行拆下,脱落下的建筑模板掉落到吸盘190上,吸盘190对建筑模板进行吸附,使得吸盘190对建筑模板起到更加稳固的支撑作用,避免支撑筒182对脱落下的建筑模板支撑不稳而导致建筑模板掉落,然后滑动平台8带动限位块180向下侧移动,限位块180带动移动块181向下侧移动,移动块181带动支撑筒182向下侧移动,支撑筒182带动吸盘190向下侧移动,吸盘190带动建筑模板向下侧移动,将建筑模板移动至与第二支撑座7接触,第二支撑座7对建筑模板起到支撑的作用,支撑筒182继续带动吸盘190向下侧移动,由于吸盘190对建筑模板进行吸附住,第二支撑座7对建筑模板进行抵住,使得吸盘190无法继续向下侧移动,移动块181继续带动支撑筒182沿吸盘190向下侧移动,连接弹簧196被压缩,同时移动块181带动导向架193沿导向环192向下侧移动,支撑筒182带动固定杆195向下侧移动与球阀191接触,并对球阀191进行挤压,使得球阀191转动,第二扭力弹簧194发生形变,球阀191转动至与吸盘190相通,使得气体进入吸盘190内,吸盘190进入气体后便与建筑模板脱离接触,在连接弹簧196的复位作用下,吸盘190沿支撑筒182向下侧移动,吸盘190带动球阀191沿导向架193向下侧移动与固定杆195脱离接触,在第二扭力弹簧
194的复位作用下,球阀191反向转动复位,这时球阀191与吸盘190不相通,之后人们便将第二支撑座7上的建筑模板进行取下,最终便可实现对脱落的建筑模板进行吸附,并将建筑模板进行升降,便于人们对脱落下的建筑模板进行收集,以确保脱落下的建筑模板能够在移动过程中更加稳固。
40.如图1、图13和图14所示,还包括有调节机构20,调节机构20包括有伺服电机200、第二螺杆201、转盘202和第二连接杆203,两个限位块180顶部均安装有伺服电机200,两个限位块180内部左右两侧均转动式设有第二螺杆201,第二螺杆201共有四个,四个第二螺杆201均与同侧的移动块181螺纹式连接,四根第二螺杆201外侧均设有转盘202,两个伺服电机200输出轴上均设有转盘202,转盘202共有六个,相邻的三个转盘202偏心位置之间均转动式设有第二连接杆203。
41.当需要调节支撑筒182与吸盘190的宽度时,便于对不同大小的建筑模板进行吸附,人们启动伺服电机200,控制伺服电机200输出轴正转,伺服电机200输出轴带动中间的转盘202转动,中间的转盘202转动带动第二连接杆203转动,第二连接杆203便带动左右两侧的转盘202进行转动,左右两侧的转盘202便带动第二螺杆201转动,第二螺杆201转动使得移动块181沿限位块180向外侧移动,移动块181带动支撑筒182向外侧移动,支撑筒182带动吸盘190向外侧移动,将吸盘190调节至适宜对建筑模板进行支撑的宽度后,人们便关闭伺服电机200,使得移动块181停止移动,当铲除板14将建筑模板进行拆下后,建筑模板掉落到吸盘190上方,吸盘190对建筑模板进行吸附,使得建筑模板在移动过程中更加稳固,当吸盘190将建筑模板输送到与第二支撑座7接触时,第二支撑座7对建筑模板起到支撑的作用,同时吸盘190与建筑模板脱离接触,这时人们便启动伺服电机200,控制伺服电机200输出轴反转,伺服电机200输出轴带动中间的转盘202反转,中间的转盘202带动第二连接杆203反转,第二连接杆203带动左右两侧的转盘202反转,左右两侧的转盘202带动第二螺杆201反转,然后移动块181便沿限位块180向内侧移动复位,移动块181带动支撑筒182向内侧移动,支撑筒182带动吸盘190向内侧移动复位,从而将吸盘190移动返回原位后,人们便关闭伺服电机200,最终便可实现对不同大小的建筑模板进行吸附和辅助不同大小的建筑模板进行升降,便于人们对建筑模板进行取下。
42.如图1、图15、图16和图17所示,还包括有防尘机构21,防尘机构21包括有支撑架210、旋转件211、发条212、防尘帘213、连接块214、转杆215和卡杆216,固定座2顶部设有支撑架210,支撑架210左右两侧均前后两侧转动式设有旋转件211,旋转件211共有四个,四个旋转件211上均设有防尘帘213,四个防尘帘213相互接触,四个防尘帘213位于升降架9外侧,四个旋转件211与支撑架210之间均设有两个发条212,发条212共有八个,八个发条212均绕接在同侧的旋转件211上,左右两侧的防尘帘213上部均设有连接块214,滑动平台8左右两侧均前后对称转动式设有转杆215,转杆215共有四个,四个转杆215内侧面前后两侧均设有卡杆216,卡杆216共有八个,八个卡杆216均与同侧的连接块214卡紧。
43.在正常状态下,防尘帘213是对固定座2上的安装部件起到防尘的作用,避免建筑模板在拆卸过程中产生的灰尘飘落到固定座2上的安装部件,减少人们后续对固定座2上的安装部件进行清理灰尘,同时卡杆216是对连接块214进行卡紧的,使得防尘帘213能够保持对固定座2上的安装部件起到防尘的效果,发条212的初始状态呈形变状态,当建筑模板拆卸完成后,人们便转动转杆215,转杆215带动卡杆216转动,卡杆216转动至不被连接块214
卡紧,在发条212的复位作用下,旋转件211转动将防尘帘213进行收卷,使得防尘帘213不会对固定座2上的安装部件进行遮挡,便于维修工人对固定座2上的安装部件进行检修,以确保本装置无故障,能够正常运行,当人们需要对固定座2上的安装部件进行防尘时,人们拉动连接块214带动防尘帘213向上侧移动,防尘帘213向上侧移动过程中带动旋转件211反转,发条212发生形变,将连接块214向上侧移动至转杆215位置后,人们便停止拉动连接块214,并反向转动转杆215,转杆215带动卡杆216反转至对连接块214进行卡紧,从而卡杆216对连接块214进行卡紧,这时防尘帘213便能够对固定座2上的安装部件起到防尘的效果,如此便可达到对本装置起到防尘的效果,避免建筑模板在拆卸过程中产生的灰尘飘落到本装置上,灰尘容易对本装置造成故障影响。
44.以上所述实施例仅表达了本发明的优选实施方式,其描述较为具体和详细,但并不能因此而理解为对本发明专利范围的限制。应当指出的是,对于本领域的普通技术人员来说,在不脱离本发明构思的前提下,还可以做出若干变形、改进及替代,这些都属于本发明的保护范围。因此,本发明专利的保护范围应以所附权利要求为准。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1