智能化高塔施工方法与流程
本发明涉及房建和桥梁施工。更具体地说,本发明涉及一种智能化高塔施工 方法。
背景技术:
1、早期高塔采用翻模进行施工,一般使用人工进行混凝土浇筑和振捣,现场施工环境也 较差,随着国外爬模技术引进,新的工艺也随之而来,自动化设备也慢慢投入到建筑施工 中,但是仍然无法通过实现工厂化、智能化达到提高品质和功效的要求。而钢塔或组合塔 施工一般采用搭设支架或安装临时平台进行,虽然目前采用液压爬模改改造成简单的自动 爬升平台,满足了自动化的要求,但是却无法改善现场施工环境,仍然需要人工和料斗进 行混凝土浇筑并采用人工操作振捣系统进行混凝土振捣,现场施工效率低下,施工质量没 法保证。钢塔或组合塔钢壳焊接一般对环境要求很高,受风和外部温度干扰较大,常规工 艺一般无法解决各种因素对焊缝质量的影响;由于组合塔采用钢壳和混凝土组合式结构, 混凝土的施工属于隐蔽工程,很难保证整体质量,更是无法采用有效措施进行混凝土养护。
技术实现思路
1、本发明的目的在于提供一种智能化高塔施工方法,以解决上述问题。
2、本发明解决此技术问题所采用的技术方案是:一种智能化高塔施工方法,包括以下步 骤:
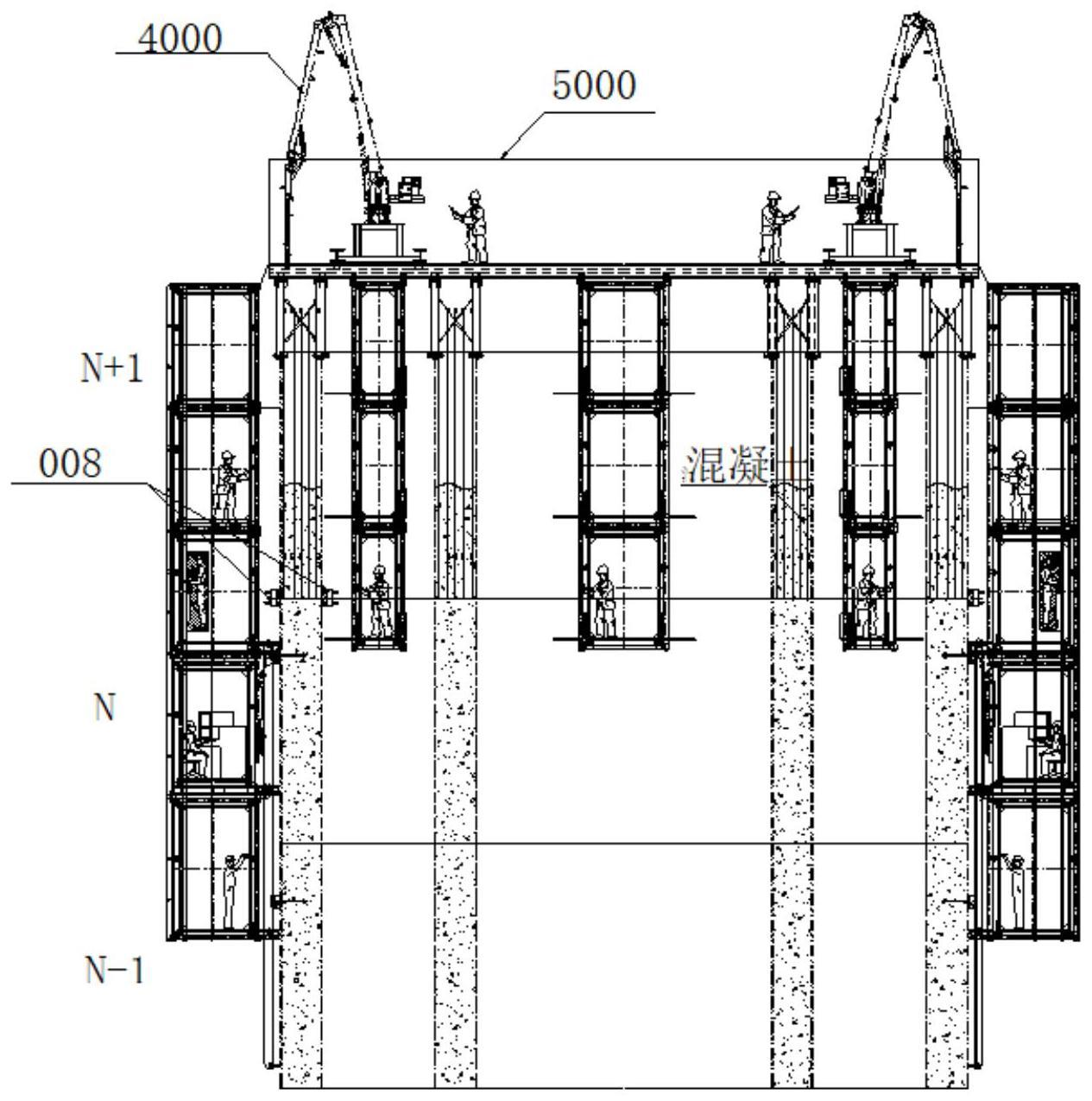
3、s1、地面完成高塔n节段施工,n≥2,提升n+1节段钢壳并与n节段钢壳连接,完 成粗定位和精确定位;安装内腔多功能平台,并完成钢筋对接;启动自动焊接系统完成拼 缝焊接;
4、s21、收起内腔多功能平台的顶部围护系统,打开自动布料系统完成n+1节段混凝土 浇筑,智能振捣装置完成振捣;
5、s22、n+1和n节段焊缝检测完毕后,自动喷涂系统完成焊缝区表面涂装;
6、s31、收起自动布料系统和自动喷涂系统,内腔架体整体提出内腔多功能平台;
7、s32、启动自动检测系统和智能养护系统,完成n+1阶段混凝土脱空检测和养护;
8、s41、提升n+2节段与n+1节段连接,完成粗定位和精确定位;
9、s42、在n+2节段钢壳上安装内腔多功能平台并上提至位于n+1节段处,通过自动焊接系统完成n+2节段钢壳与n+1节段钢壳对接;
10、s43、安装n+1节段处预埋件和承重挂靴,收起自动检测系统,启动智能控制系统,爬升智能爬升装置的轨道系统;
11、s44、拆除n-1节段预埋件和承重挂靴;
12、s45、收起自动焊接系统和智能养护系统,启动智能控制系统,爬升智能爬升装置的 智能筑塔装置;
13、s5、之后重复步骤s21~s45。
14、优选的是,所述内腔多功能平台包括:支撑系统、承载平台一、行走系统和内腔平台;
15、所述支撑系统支撑于高塔最上方的钢壳上,承载平台一安放于支撑系统上,内腔平台 通过行走系统悬挂于承载平台一上位于高塔的内部;
16、支撑系统包括若干立柱、若干立柱呈框型分布,呈框型分布的立柱相对的两侧通过可 调连杆组一连接,其另外相对的两侧通过可调连杆组一连接,所述立柱的下端设置有锁紧 装置,所述立柱的上端设置有行走滚轮一,所述立柱上端位于行走滚轮一两侧设置有限位 装置一;
17、承载平台一包括承重梁、防护栏杆、安全围护、行走平台和端部限位装置;
18、行走系统包括行走油缸,其一端与承载平台一相连,其另一端与内腔平台相连;所述 内腔平台上设置有行走滚轮二和限位装置二,所述限位装置二位于行走滚轮二两侧,所述 承载平台一的下端卡设于所述限位装置二中,行走油缸伸缩带动限位装置二和行走滚轮组 二在承载平台一上滑动;
19、优选的是,内腔平台包括第一外圈平台、外圈翻转平台、内圈平台和内圈翻转平台;
20、所述第一外圈平台上安装有若干上压轮和下撑轮,内圈平台位于上压轮和下撑轮之 间,内圈平台通过销轴二和伸缩油缸与第一外圈平台相连;
21、外圈翻转平台与第一外圈平台转动相连;内圈翻转平台与内圈平台相连,通过翻转可 以实现内圈平台在第一外圈平台内移动。
22、优选的是,所述内腔多功能平台上放置有自动布料系统、自动喷涂系统、智能振捣装 置。
23、优选的是,所述内腔多功能平台还包括全封闭式围护系统,其可拆卸的设置于内腔多 功能平台的外周。
24、优选的是,如图所述智能爬升装置包括智能筑塔装置、轨道系统、预埋件和承重挂靴;
25、所述预埋件预埋于节段内,承重挂靴通过预埋件锚固于节段表面,轨道系统穿过承重 挂靴并固定,
26、所述智能筑塔装置包括:承载平台二、内圈平台、外伸缩油缸和内伸缩油缸,内圈平 台置于承载平台二内,通过外伸缩油缸和内伸缩油缸实现自动伸缩,承载平台二和内圈平 台组成一套体系后穿过轨道系统与承重挂靴连接;
27、所述智能筑塔装置上放置有自动喷涂系统、自动检测系统、智能养护系统、自动焊接 系统、智能控制系统。
28、本发明至少包括以下有益效果:本发明的智能化高塔施工方法,能快速、安全、精准 的完成高塔施工,适用于不同类型的塔施工。
29、本发明的其它优点、目标和特征将部分通过下面的说明体现,部分还将通过对本发明 的研究和实践而为本领域的技术人员所理解。
技术特征:
1.一种智能化高塔施工方法,其特征在于,包括以下步骤:
2.如权利要求1所述的智能化高塔施工方法,其特征在于,所述内腔多功能平台包括:支撑系统、承载平台一、行走系统和内腔平台;
3.如权利要求2所述的智能化高塔施工方法,其特征在于,内腔平台包括第一外圈平台、外圈翻转平台、内圈平台和内圈翻转平台;
4.如权利要求3所述的智能化高塔施工方法,其特征在于,所述内腔多功能平台上放置有自动布料系统、自动喷涂系统、智能振捣装置。
5.如权利要求1所述的智能化高塔施工方法,其特征在于,所述内腔多功能平台还包括全封闭式围护系统,其可拆卸的设置于内腔多功能平台的外周。
6.如权利要求1所述的智能化高塔施工方法,其特征在于,如图所述智能爬升装置包括智能筑塔装置、轨道系统、预埋件和承重挂靴;
技术总结
本发明公开了一种智能化高塔施工方法,包括以下步骤:S1、地面完成高塔N节段施工,N≥2,提升N+1节段钢壳并与N节段钢壳连接,完成粗定位和精确定位;安装内腔多功能平台,并完成钢筋对接;启动自动焊接系统完成拼缝焊接;S21、收起内腔多功能平台的顶部围护系统,打开自动布料系统完成N+1节段混凝土浇筑,智能振捣装置完成振捣;S22、N+1和N节段焊缝检测完毕后,自动喷涂系统完成焊缝区表面涂装;S31、收起自动布料系统和自动喷涂系统,内腔架体整体提出内腔多功能平台;S32、启动自动检测系统和智能养护系统,完成N+1阶段混凝土脱空检测和养护。
技术研发人员:李环宇,陈良,翟保进,古明昌,臧晏明
受保护的技术使用者:中交二航局第二工程有限公司
技术研发日:
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!