一种高精度反力墙施工方法与流程
1.本发明涉及土木工程结构抗震试验领域,尤其涉及一种高精度反力墙施工方法。
背景技术:
2.随着科研技术的发展,反力墙结构作为结构试验室的重要试验设施,在我国各高校兴建,是用于研究结构抗震性能、抗风性能的试验装置,其与测量系统、加力系统、计算和监测系统、反力台座共同构成伪动力试验装置。
3.作为特种结构的反力墙,根据已有文献,反力墙墙顶最大的侧向绕度可供参考的有1/1000h、1/1800h、1/2000h、1/3000h。考虑试验室实际加载,作动器作用于反力墙上的吨位和排列布置,取侧向挠度控制在1/1800h以内,即墙顶最大侧向位移为反力墙的高度1/1800。墙身的墙厚一般根据荷载工况取300mm~600mm,反力墙由于需要承受极大的静力或动力荷载,而且对变形、强度和裂缝控制等级的要求都很高,实际工程中多是通过施加预应力,在控制反力墙墙体的抗侧刚度的同时又避免过多的增加墙体的厚度。反力墙结构在试验加载过程中,墙根部产生巨大弯矩与剪力,故为保证对反力墙的约束,对箱型台座的厚度有一定要求。常见的箱底厚度有550mm、600mm、800mm,其中以800mm居多。
4.表面平整度的控制是衡量反力墙与箱式台座的施工质量的指标之一,目前国内尚无明确的施工规范,调研已建成试验室的作法,总结如下要求:箱式台座及反力墙墙面平整度允许偏差为
±
2mm、反力墙竖向垂直度
±
10mm、横向高低偏差
±
5mm、台座纵向
±
10mm,加载孔道预埋件孔距允许偏差2mm。考察许多高校试验室,发现反力墙的施工质量要求极高,施工中常见问题,如上下层混凝土交接平整度不达标,多者达10mm左右,但适当控制,墙面平整度偏差可控制在2mm以内。有效控制反力墙施工平整度,可在面板内设置型钢固定加载孔预埋件、或者墙体支模后用外部支架加固,再分层施工和浇筑。最终使平整度偏差在3mm以内,加载孔孔距偏差控制在2mm。反力墙墙身和台座面板上有数百个加载孔,有关加载孔的设计资料较少,多数是参考已有的反力墙的设计资料设计的,但单孔承载力在文献中给出的有125kn、150kn、 250kn、300kn、500kn, 其中以取300kn为多,加载孔孔距多为500mm,根据作动器的构造特点,按四个孔同时受力,而关于加载孔的尺寸未见详细研究。
5.综上所述,一般反力墙施工指标控制如下:(1)试台座平台平整度控制在
±
2mm/2m以内,反力墙墙面平整度控制在
±
2mm/2m以内,垂直度控制在
±
2mm/3m以内,墙体采用清水混凝土浇筑,严禁二次抹灰找平。
6.(2)试验台座与反力墙上预埋加载孔,加载孔制作长度偏差控制在
±
1mm,端板平整度控制在
±
0.5mm以内。
7.(3)试验台座与反力墙内加载孔型钢定位支架的工厂制作误差应控制在
±
2mm以内,定位安装精度控制在
±
4mm以内。
8.(4)试验台座与反力墙加载孔安装偏差控制在
±
1mm以内。
9.为此,需要研究一种新的施工方法以解决反力墙施工质量控制问题,要保证墙体整体性、预埋件的定位精度、结构表面的强度和平整度。
技术实现要素:
10.鉴于此,本发明的目的在于提供一种高精度反力墙施工方法,保证墙体整体性、预埋件的定位精度、结构表面的强度和平整度,避免后期与测量系统和加力系统设备设施无法协同或精度不足,影响试验研究。
11.为实现上述目的,本发明所采用的技术方案是:高精度反力墙施工方法,包括以下步骤:步骤一、制作转体台座,反力墙在转体台座上进行原位水平施工,利用激光整平机控制反力墙表面平整度;步骤二、反力墙养护及质量检测合格后,将水平布置的反力墙在转体台座上进行转体,使反力墙由水平调整为竖直,并对反力墙定位固定;步骤三、反力墙转体就位后,与转体台座以及反力台座进行混凝土浇筑连接,并进行养护,直至质量检测合格。
12.进一步的,反力墙在浇筑前,在转体台座上支设反力墙模板,反力墙模板包括外模板架和设置在外模板架内的两个水平间隔布置的内模板架;反力墙包括内侧墙、横隔墙及外侧墙,内侧墙内预埋有多个加载孔,施工时采用高流态自密实补偿收缩混凝土分两次进行浇筑,首先在外模板架形成的浇筑腔内浇筑反力墙的横隔墙和外侧墙,并养护完成,然后以已浇筑好的外侧墙为基础,支设内模板架,在外模板架和内模板架之间形成的内侧墙浇筑腔内浇筑成型内侧墙并养护,完成反力墙的浇筑施工。
13.进一步的,外模板架包括底模板和侧模板,转体台座上设有水平支座调平系统,水平支座调平系统包括沿反力墙长度方向上间隔设置的多个调平液压缸,所有调平液压缸的驱动端与底模板之间设有支撑背楞;各调平液压缸均连接有位移及应力监测系统,用于调节底模板的水平度;所述激光整平机用于控制反力墙表面的标高,包括激光发射器、激光接收器和水准标尺杆,激光发射器以设定的频率发射激光,形成一个激光束控制平面,然后在地面设计标高的水准控制点上立水准标尺杆,通过其上的水准定位头接收激光束锁定水准定位头,最后调整激光整平机上的激光接收器,通过激光整平机内部的电脑系统,控制整平头的作业标高。
14.进一步的,转体台座上安装有转轴,转轴与外模板架固定连接,转体台座上于转轴的一侧沿转体台座的长度方向上间隔设置有多个顶升支座,转体台座上于转轴的另一侧设有拉回支座,底模板上对应各顶升支座的位置设有顶升支撑点,顶升支撑点与对应的顶升支座之间可拆铰接有液压顶升转体油缸,靠近拉回支座的侧模板上对应拉回支座上设有拉回支撑点,拉回支撑点与对应的拉回支座之间可拆铰接有液压拉回转体油缸;所述反力墙绕转轴的轴线进行转体,转体时,位于转轴最远处的液压顶升转体油缸最先达到顶升极限位置,达到后将该液压顶升转体油缸拆除,并在该顶升液压油缸对应的顶升支撑点与顶升支座之间铰接长度可调的支撑杆,其余各顶升液压油缸按照此步骤循环,直至将反力墙转动至竖直位置。
15.进一步的,反力台座上设有多个预留孔洞,预留孔洞处安装有斜支撑,用于支撑处于竖直状态的反力墙。
16.优选的,各个液压顶升转体油缸的活动行程均相等。
17.优选的,位于反力墙根部的侧模板的内侧面设有花纹构造。
18.进一步的,反力墙结构底部与转体台座和反力台座之间进行固结,固结节点由锚栓连接、空隙填充封闭和外部包裹三部分组成;锚栓连接是在转体台座上于反力墙转体至竖直状态时所相对的部分事先预埋有锚固螺栓,反力墙在浇筑时在对应位置预留定位孔,以使反力墙转体至竖直位置时,各锚固螺栓能对应插入到预留定位孔内;空隙填充封闭是在反力墙与转体台座之间的空隙内采用灌浆料进行密封充填;外部包裹为在转体台座和反力台座上预留钢筋,待反力墙固定就位后,利用预留钢筋和反力墙预留钢筋进行连接并浇筑高流态自密实补偿收缩混凝土对反力墙根部进行包裹。
19.本发明的高精度反力墙施工方法的有益效果:1、本发明避免了传统反力墙竖向施工的方式,而是将反力墙先水平施工完成,然后转体至竖直状态,由于反力墙的平整度需要更加精确的控制,而反力墙水平施工时能够依靠激光整平机进行控制,一旦激光整平机的激光系统初始化完毕,只要激光发射器不受扰动,无论激光整平机移动到那里,地面标高始终以激光发射器发射的旋转激光束构成的平面为控制面,保证了大面积整体铺注的反力墙的水平度和平整度。
20.2、反力墙进行两次浇筑,更容易控制浇筑质量,并且内模板架的支设可以反力墙第一次浇筑后的部分作为基础进行支设,简化了内模板架的结构,减少了对应构件的数量,成本更低。
21.3、各调平液压缸和各液压顶升转体油缸可外接位移及应力监测系统,可实时对各调平液压缸和各液压顶升转体油缸进行调整,保证混凝土浇筑时,保证底模板的水平,进而保证反力墙表面的平整度和精度;以及最终反力墙的竖直。
附图说明
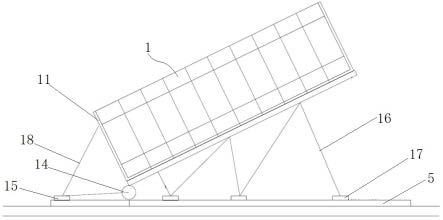
22.图1是本发明的高精度反力墙施工方法中所施工的反力墙的平面示意图;图2是本发明的高精度反力墙施工方法中反力墙的水平施工工艺示意图;图3是本发明的高精度反力墙施工方法中反力墙的转体施工工艺示意图;图4是本发明的高精度反力墙施工方法中反力墙竖直就位时的示意图;图5是本发明的高精度反力墙施工方法中反力墙根部固结处理示意图。
23.附图标记:1-反力墙,2-横隔墙,3-内侧墙,4-外侧墙,5-转体台座,6-反力台座,7-加载孔,8-外模板架,9-内模板架,10-底模板,11-侧模板,12-调平液压缸,13-支撑背楞,14-转轴,15-拉回支座,16-液压顶升转体油缸,17-顶升支座,18-液压拉回转体油缸,19-斜支撑,20-锚固螺栓,21-加固背楞,22-预留孔洞。
具体实施方式
24.下面结合附图及具体实施方式对本发明作进一步详细描述。
25.本发明的高精度反力墙施工方法的具体实施例:本发明的高精度反力墙施工方法所施工后的反力墙如图1所示,反力墙1包括内侧墙3、横隔墙2及外侧墙4。两面反力墙1在反力台座6上呈l形布置,反力墙1的内侧墙内和反力台座6上在对应的区域内均设有多个呈矩形阵列分布的加载孔7。
26.如图1至图5所示,高精度反力墙施工方法包括以下步骤:步骤一、制作转体台座5,反力墙1在转体台座5上进行原位水平施工,利用激光整
平机控制反力墙表面平整度;步骤二、反力墙1养护及质量检测合格后,将水平布置的反力墙1在转体台座5上进行转体,使反力墙1由水平调整为竖直,并对反力墙1定位固定;步骤三、反力墙1转体就位后,与转体台座5以及反力台座6进行混凝土浇筑连接,并进行养护,直至质量检测合格。
27.具体的,步骤一中反力墙水平施工时,如图2所示,需要在转体台座5上支设反力墙模板,本实施例中,反力墙模板包括外模板架8和设置在外模板架8内的两个水平间隔布置的内模板架9。由于反力墙包括内侧墙3、横隔墙2及外侧墙4,为了施工方便,本实施例中,反力墙1采用高流态自密实补偿收缩混凝土分两次进行浇筑。首先在外模板架8形成的浇筑腔内浇筑反力墙1的横隔墙2和外侧墙4,浇筑至设定的标高并养护完成,然后以已浇筑好的外侧墙4为基础,在其上支设内模板架9,在外模板架8和内模板架9之间形成的内侧墙浇筑腔内浇筑成型内侧墙并养护,完成反力墙的浇筑施工。需要说明的是,图2仅是反力墙模板的简单示意图,在实际中,外模板架8和内模板架9均包括采用4mm厚钢板制作的侧模板11、加固背楞21、龙骨及阳角锁具组成。由于内模板架9以外侧墙4为基础,因此内模板架9不设置底模板,而外模板架8包括底模板10。位于反力墙1根部的侧模板11的内侧面设有花纹构造,用于对接触面粗糙处理。
28.为保证反力墙浇筑时的处于水平,在转体台座5上设有水平支座调平系统。如图2所示,水平支座调平系统包括沿反力墙1长度方向上间隔设置的多个调平液压缸12,所有调平液压缸12的驱动端与底模板10之间设有支撑背楞13。各调平液压缸12均连接有位移及应力监测系统,用于调节底模板10的水平度。此处的调平分为两个过程,第一次是外模板架8支设后对底模板10的调平,第二次是在浇筑混凝土时,混凝土对底模板10产生压力,进而会导致底模板10在各个调平液压缸12支撑处的位置发生细微的变化,此时通过位移及应力监测系统即可实时控制各个调平液压缸12,最终保证底模板10在浇筑时处于水平。
29.另外,在浇筑混凝土时,采用激光整平机进行混凝土的浇筑和摊铺,进而控制反力墙表面的标高。激光整平机为现有技术,包括激光发射器、激光接收器和水准标尺杆,激光发射器以每秒钟10次的频率发射激光,形成一个激光束控制平面,然后在地面设计标高的水准控制点上立水准标尺杆,通过其上的水准定位头接收激光束锁定水准定位头,最后调整激光整平机上的激光接收器,通过激光整平机内部的电脑系统,控制整平头的作业标高。由于激光发射器为独立设置,一旦激光系统初始化完毕,只要激光发射器不受扰动,无论激光整平机移动到那里,地面标高始终以激光发射器发射的旋转激光束构成的平面为控制面,保证了大面积整体铺注的反力墙的水平度和平整度。
30.如图3所示,转体台座5上转动装配有转轴14,转轴14与外模板架8固定连接,从而外模板架8可相对转体台座5进行转动。转体台座5上于转轴14的右侧沿转体台座5的长度方向上间隔设置有多个顶升支座17,转体台座5上于转轴14的左侧设有相应的拉回支座15。底模板10上对应各顶升支座17的位置设有顶升支撑点,顶升支撑点与对应的顶升支座17之间铰接有液压顶升转体油缸16,并且液压顶升转体油缸16的两端可以分别从顶升支座17和顶升支撑点处拆卸。同样的,外模板架8的靠近拉回支座15的侧模板11上对应拉回支座15上设有拉回支撑点,拉回支撑点与对应的拉回支座15之间铰接有液压拉回转体油缸18,液压拉回转体油缸18可以分别从拉回支座15和拉回支撑点处拆卸。
31.液压顶升转体油缸16和液压拉回转体油缸18均连接位移及应力监测系统。反力墙1绕转轴14的轴线进行转体,各个液压顶升转体油缸16的活动行程均相等。初始位置时,液压顶升转体油缸16与调平液压缸12之间均支撑底模板10,此时的液压顶升转体油缸16的顶升行程较小,位于转轴14最远处的液压顶升转体油缸16动作速度最快,并最先达到顶升极限位置,此时反力墙已被转动至一定角度;此时需要将该液压顶升转体油缸拆除,并换取更大行程的液压顶升转体缸,以能够满足将反力墙转动至竖直。当能够满足要求且处于转轴14最远处的液压顶升转体油缸16顶升至极限位置时,将其拆除,并在该顶升液压油缸对应的顶升支撑点与顶升支座之间铰接长度可调的支撑杆,其余各顶升液压油缸则按照此步骤循环进行,在液压顶升转体油缸16动作的同时,液压拉回转体油缸18也进行动作,起到对反力墙支撑和拉回的作用,最终实现将反力墙转动至竖直位置,此时各根长度可调的支撑杆又作为斜撑对反力墙的右侧进行支撑,如图4所示,此时反力墙根部的侧模板可以拆除。在实际施工时,可以采用经纬仪对反力墙的垂直度进行检测。
32.如图4所示,反力台座6上设有多个预留孔洞22,预留孔洞22处安装有斜支撑16,用于支撑处于竖直状态的反力墙1,并支撑在反力墙1的左侧。
33.如图5所示,反力墙1底部与转体台座5和反力台座6之间进行固结,固结节点由锚栓连接、空隙填充封闭和外部包裹三部分组成。锚栓连接是在转体台座5上于反力墙1转体至竖直状态时所相对的部分事先预埋有锚固螺栓20,反力墙1在浇筑时在对应位置预留定位孔,以使反力墙1转体至竖直位置时,各锚固螺栓20能对应插入到预留定位孔内。空隙填充封闭是在反力墙1与转体台座5之间的空隙内采用高强灌浆料进行密封充填。外部包裹为在转体台座5和反力台座6上预留钢筋,待反力墙1固定就位后,利用预留钢筋和反力墙预留钢筋进行连接并浇筑高流态自密实补偿收缩混凝土对反力墙根部进行包裹。
34.本发明避免了传统反力墙竖向施工的方式,而是将反力墙先水平施工完成,然后转体至竖直状态,由于反力墙的平整度需要更加精确的控制,而反力墙水平施工时能够依靠激光整平机进行控制,一旦激光整平机的激光系统初始化完毕,只要激光发射器不受扰动,无论激光整平机移动到那里,地面标高始终以激光发射器发射的旋转激光束构成的平面为控制面,保证了大面积整体铺注的反力墙的水平度和平整度。
35.以上所述的本发明的实施方式,并不构成对本发明保护范围的限定。任何在本发明的精神和原则之内所作的修改、等同替换和改进等,均应包括在本发明的权利要求保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1