一种基于车板的停取车追踪控制方法与流程
1.本发明涉及智能停车库技术领域,具体地指一种基于车板的停取车追踪控制方法。
背景技术:
2.智能立体车库也称为机械式立体停车库,是利用钢结构作为主框架,配合升降机、横移装置以及控制系统组装而成,用来最大量存取放车辆的机械系统设备。一般来说单个库的容量在20-80台之间,因此如何安全可靠的将车辆存储位置等信息记录下来传给调度系统进行整体调度是智能立体车库的一个关键技术点。
3.信息的存储转移常用方式为在载体(载车板)上安装id卡,在关键设备比如升降机、穿梭车等位置安装读写头,进行信息的写入及读出并及时传递给调度系统。如id卡方式,其方法如下:车辆进入停车厅后车牌识别系统将识别出来的车牌信息通过升降机上的读写头写入到载车板上的id卡中并与载车板的车板号进行绑定,调度系统收到信息后根据库区内车板存储状况将升降机运行到指定楼层,升降机到达指定楼层后,调度系统指定穿梭车运行到升降机处将载车板从升降机上导入,穿梭车上的读写头从载车板上读出信息,调度系统收到信息后指定穿梭车行走到对应库位将载车板存入。取车时动作类似,这种方法运用比较广泛。
4.但是,为了实现连续追踪和大量的记录存储,针对某一大型智能立体车库而言,就需要在近20台升降机、40台穿梭车、几百个载车板上都安装读写头或者id卡,这将是一笔不菲的成本。
技术实现要素:
5.本发明的目的就是要解决上述背景技术的不足,提供一种成本低、稳定可靠,且发生异常可以快捷处理的基于车板的停取车追踪控制方法。
6.为实现此目的,本发明所设计的基于车板的停取车追踪控制方法,包括停车追踪控制方法和取车追踪控制方法;所述停车追踪控制方法包括识别待停车辆的车牌号,将待停车辆的车牌号与载车板的车板号进行绑定,转运机构将载有待停车辆的载车板运送至空闲停车位,将待停车辆所在停车位的车位号与所述载车板的车板号进行绑定;所述取车追踪控制方法包括输入待取车辆的车牌号,根据待取车辆的车牌号确定待取车辆所在停车位的车位号,转运机构根据待取车辆所在停车位的车位号运动至待取车辆的所在停车位,将载有待取车辆的载车板转运至取车位置。以载车板为基础,停取车均与载车板相关联,通过对载车板进行追踪和控制,即可得到每台车的运动轨迹,确定每台车的所在位置,从而实现停取车的智能控制。
7.进一步的,所述转运机构将载有待停车辆的载车板运送至空闲停车位的方法是:升降机将载有待停车辆的载车板转运至空闲停车位所在楼层,穿梭车将载有待停车辆的载车板从升降机转运至空闲停车位。
8.进一步的,所述根据待取车辆的车牌号确定待取车辆的车位号的方法是:根据待取车辆的车牌号确定载有待取车辆的载车板的车板号,根据所述载车板的车板号确定待取车辆所在停车位的车位号。
9.进一步的,所述转运机构根据待取车辆所在停车位的车位号运动至待取车辆的所在停车位,将载有待取车辆的载车板转运至取车位置的方法是:根据待取车辆所在停车位的车位号确定待取车辆的所在楼层,升降机运动至待取车辆的所在楼层,穿梭车将载有待取车辆的载车板从停车位转运至升降机内,升降机将载有待取车辆的载车板转运至取车位置。
10.进一步的,所述停车追踪控制方法还包括判断所述载车板在穿梭车上的转运状态,其方法是:在所述穿梭车上布置多个位置开关或多个位置传感器,通过载车板在穿梭车上的位置移动,依次触发多个位置开关或多个位置传感器动作,监测多个位置开关或多个位置传感器的触发顺序,判断载车板是从穿梭车上导出还是向穿梭车上导入。
11.进一步的,所述停车追踪控制方法还包括检测载车板的转运状态,避免出现和传递错误的载车板状态信息,其方法是:检测升降机或空闲停车位是否被载车板占位;若检测到升降机未被占位,载车板向穿梭车上导入,则所述载车板从所述升降机内转运至所述穿梭车上;若检测到载车板从所述穿梭车上导出、空闲停车位被载车板占位,则所述载车板从所述穿梭车上转运至所述空闲停车位内。
12.具体的,所述停车追踪控制方法包括以下步骤:
13.步骤一、识别待停车辆的车牌号,将待停车辆的车牌号与载车板的车板号进行绑定;
14.步骤二、升降机将载有待停车辆的载车板转运至空闲停车位所在楼层;
15.步骤三、将载有待停车辆的载车板从升降机内转运至穿梭车上,检测载车板是否从升降机内完全转运至穿梭车上;
16.步骤四、确定载车板从升降机内完全转运至穿梭车上后,穿梭车将载有待停车辆的载车板转运至空闲停车位;
17.步骤五、检测载车板是否从所述穿梭车上完全转运至空闲停车位,确定载车板从所述穿梭车上完全转运至空闲停车位后,将待停车辆所在停车位的车位号与载车板的车板号进行绑定。
18.上述步骤三至步骤五中,检测载车板是否从升降机内完全转运至空闲停车位内的方法是:检测升降机或空闲停车位是否被载车板占位(通过占位开关或占位传感器实现);若检测到升降机未被占位,载车板向穿梭车上导入,则所述载车板从所述升降机内完全转运至所述穿梭车上;若检测到载车板从所述穿梭车上导出、空闲停车位被载车板占位,则所述载车板从所述穿梭车上完全转运至所述空闲停车位内。其中,判断所述载车板在穿梭车上的转运状态的方法是:在所述穿梭车上布置多个位置开关或多个位置传感器,通过载车板在穿梭车上的位置移动,依次触发多个位置开关或多个位置传感器动作,监测多个位置开关或多个位置传感器的触发顺序,判断载车板是从穿梭车上导出还是向穿梭车上导入。
19.进一步的,所述取车追踪控制方法还包括判断所述载车板在穿梭车上的转运状态,其方法是:在所述穿梭车上布置多个位置开关或多个位置传感器,通过载车板在穿梭车上的位置移动,依次触发多个位置开关或多个位置传感器动作,监测多个位置开关或多个
位置传感器的触发顺序,判断载车板是从穿梭车上导出还是向穿梭车上导入。
20.进一步的,所述取车追踪控制方法还包括检测载车板的转运状态,避免出现和传递错误的载车板状态信息,其方法是:检测升降机或停车位是否被载车板占位;若检测到停车位未被载车板占位,载车板向所述穿梭车上导入、则所述载车板从停车位转运至所述穿梭车上,若检测到升降机被占位,载车板从穿梭车上导出,则所述载车板从所述穿梭车转运至所述升降机内。
21.具体的,所述取车追踪控制方法包括以下步骤:
22.步骤一、输入待取车辆的车牌号,根据待取车辆的车牌号确定载有待取车辆的载车板的车板号,根据载有待取车辆的载车板的车板号确定待取车辆所在停车位的车位号;
23.步骤二、根据待停车辆所在停车位的车位号确定待取车辆的所在楼层,升降机运动至待取车辆的所在楼层;
24.步骤三、穿梭车根据待取车辆所在停车位的车位号运动至待取车辆所在的停车位,将载有待取车辆的载车板从停车位转运至穿梭车上,检测载车板是否从停车位完全转运至所述穿梭车上;
25.步骤四、确定载车板从停车位完全转运至所述穿梭车上后,穿梭车将载有待取车辆的载车板转运至升降机内;
26.步骤五、检测穿梭车是否将载有待取车辆的载车板完全转运至升降机内,确定载车板从穿梭车上完全转运至升降机内后,升降机将载有待取车辆的载车板转运至取车位置。
27.上述步骤三至步骤五中,检测载车板是否从停车位完全转运至升降机内的方法是:检测升降机或停车位是否被载车板占位(通过占位开关或占位传感器实现);若检测到停车位未被载车板占位,载车板向所述穿梭车上导入、则所述载车板从停车位完全转运至所述穿梭车上,若检测到升降机被占位,载车板从穿梭车上导出,则所述载车板从所述穿梭车完全转运至所述升降机内。其中,判断所述载车板在穿梭车上的转运状态的方法是:在所述穿梭车上布置多个位置开关或多个位置传感器,通过载车板在穿梭车上的位置移动,依次触发多个位置开关或多个位置传感器动作,监测多个位置开关或多个位置传感器的触发顺序,判断载车板是从穿梭车上导出还是向穿梭车上导入。
28.本发明的有益效果是:本发明无需在载车板、升降机和穿梭车上安装读写设备,只需以载车板的车板号为基础,记录位于载车板上的车辆的车牌号和车辆所在停车位的车位号即可得到所有车辆对应的停车位,追踪载车板即可得到所有车辆的运动轨迹,对所有车辆进行停取车的智能调配。本发明所设计的停取车追踪控制方法提高了设备运行性能的稳定性,即使通讯过程中出现中断,也能迅速还原通讯中断前的操作,有效保证了追踪控制方法的准确性和稳定性,无需额外增加硬件结构,具有良好的经济价值和市场推广价值。
附图说明
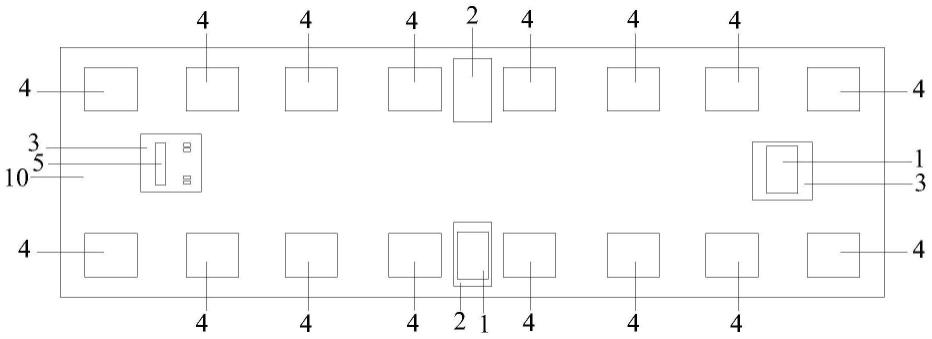
29.图1为本发明中单层停车库的结构示意图;
30.图2为本发明中穿梭车的结构示意图;
31.其中,1—载车板,2—升降机,3—穿梭车,4—停车位,5—移载机构,6—前进减速开关,7—前进到位开关,8—后退减速开关,9—后退到位开关,10—单层停车库。
具体实施方式
32.下面结合附图和具体实施例对本发明作进一步的详细说明。
33.如图1—2所示,本发明所设计的基于车板的停取车追踪控制方法,包括停车追踪控制方法和取车追踪控制方法。
34.停车追踪控制方法包括:识别待停车辆的车牌号,将待停车辆的车牌号与载车板1的车板号进行绑定;升降机2将载有待停车辆的载车板1转运至空闲停车位所在楼层,穿梭车3将载有待停车辆的载车板1从升降机2转运至空闲停车位;将待停车辆所在停车位的车位号与载车板1的车板号进行绑定。
35.为进一步保证停车追踪控制方法稳定可靠,本发明还设计了检测载车板1是否从升降机2内完全转运至穿梭车3上的方法和检测载车板1是否从穿梭车3上完全转运至空闲停车位上的方法。其中,检测载车板1是否从升降机2内完全转运至穿梭车3上的方法是:检测升降机2内是否被载车板1占位(可在升降机2内设置升降机占位开关或占位传感器实现),判断载车板1的运动状态(可通过检测开关或传感器的动作判断载车板1的运动状态);若检测到载车板1朝向穿梭车3运动、升降机2内未被载车板1占位,则载车板1从升降机2内完全转运至穿梭车3上。检测载车板1是否从穿梭车3上完全转运至空闲停车位上的方法是:检测空闲停车位是否被载车板1占位,判断载车板1的运动状态;若检测到载车板1远离穿梭车3运动、空闲停车位被载车板1占位,则载车板1从穿梭车3上完全转运至空闲停车位内。
36.取车追踪控制方法包括:输入待取车辆的车牌号,根据待取车辆的车牌号确定载有待取车辆的载车板1的车板号,根据载车板1的车板号确定待取车辆所在停车位的车位号;根据待取车辆所在停车位的车位号确定待取车辆的所在楼层,升降机2运动至待取车辆的所在楼层,穿梭车3将载有待取车辆的载车板1从停车位转运至升降机2内,升降机2将载有待取车辆的载车板1转运至取车位置。
37.为进一步保证取车追踪控制方法稳定可靠,本发明还设计了检测载车板1是否从停车位完全转运至穿梭车3上的方法和检测载车板1是否从穿梭车3上完全转运至升降机2内的方法。其中,检测载车板1是否从停车位完全转运至穿梭车3上的方法是:检测停车位是否被载车板1占位(可通过停车位占位检测开关或占位传感器实现),判断载车板1的运动状态(可通过检测开关或传感器的动作判断载车板1的运动状态);若检测到载车板1朝向穿梭车3运动、停车位未被载车板1占位,则载车板1从停车位完全转运至穿梭车3上。检测载车板1是否从穿梭车3上完全转运至升降机2内的方法是:检测升降机2内是否被载车板1占位(可在升降机2内设置升降机占位开关或占位传感器实现),判断载车板1的运动状态(可通过检测开关或传感器的动作判断载车板1的运动状态);若检测到载车板1远离穿梭车3运动、升降机2内被载车板1占位,则载车板1从穿梭车3上完全转运至升降机2内。
38.如图1—2所示,本发明以某高级写字楼地下智能车库为例进行说明,该5a级写字楼办公人员众多,车主上下班时间点非常集中,快速高效的存取车是该立体车库的最主要需求,为达到这一目标本车库采用如图1所示的平面移动式机械停车库ppyld-3-dfd(地下三层)型,单层停车库10包括供穿梭车3行走的中间巷道、位于巷道左右两侧的双排停车位4和位于单层停车库中部的升降机2。每个停车位4均有一个载车板1,车辆停在载车板1上,由升降机2及穿梭车3负责将载车板1运送到相应位置。停车库由西门子s7-300系列可编程控制器控制,采用profibus-dp总线通讯控制方式。
39.车库分为地面车厅及地下存车库两部分,其中存储库分为三层,一层只能存储suv车辆或轿车,二层、三层只能存储轿车车型,每一层有两个穿梭车3负责与升降机2和停车位4进行载车板1的转移。地面车厅负责车辆的开进与驶离。设备空闲时将空的载车板1通过穿梭车3和升降机2送到一层停车厅等待待存储的车辆。取车时需先将空的载车板1送到空闲停车位后再将载有待取车辆的载车板1通过穿梭车3和升降机2送到停车厅。升降机2只能在一个方向进出载车板1,以图1中下方的升降机2为例,载车板1可以从下往上导出至穿梭车3上或从上往下导出穿梭车3进入升降机2内。升降机2具体在哪一层可以通过升降位置检测传感器来判定。如图2所示,穿梭车3在巷道里面往复左右运行,通过移栽机构5的上下动作将载车板1从穿梭车3的上下两侧导入或导出(移栽机构5将载车板1夹住后向穿梭车3上拖拽或向远离穿梭车3的方向导出载车板1),穿梭车3上设置有后退到位开关9、后退减速开关8、前进减速开关6和前进到位开关7四个检测开关,通过这四个检测开关不同的通断顺序可以准确的判定载车板1是从哪个方向进出穿梭车3,判断载车板1是从穿梭车3上导出还是导入。
40.每个停车位4均安装有一个停车位占位检测传感器,可以准确确认载车板1是否停止到位。汽车进入停车厅后,车牌识别系统将识别好的车牌信息与当前载车板1的车板号进行绑定并传送给调度系统进行记录,调度系统根据库位存储情况发布命令控制升降机2、穿梭车3动作将车存好并把空的载车板1送到停车厅等待下一辆待存车辆。取车时在停车厅门口终端输入待取车牌信息,调度系统根据记录将装有待取车辆的载车板1取出放到车厅用户开走。通过分析工艺流程,载车板1主要在停车位4、穿梭车3和升降机2之间进行转移,而穿梭车3位于停车位4及升降机2之间,因此只要把穿梭车3上的载车板1信息交互过程记录清楚就完全可以实现智能停取车的功能。穿梭车3将载车板1从升降机2上转移有两个状态,分别是从前导入导出及从后导入导出,从停车位4转移也有从前导入导出及从后导入导出两个状态,为了最大限度的减少外部干扰,比如自动过程中发生设备故障需要手动处理,或者是自动过程中断后需要重新发布新的导入导出命令。可通过判断停车位4和升降机2占位与否并结合穿梭车3上的四个检测开关的不同状态变化来保证信息转移的可靠性。
41.针对上述停车库,本发明所设计的停车追踪控制方法包括以下步骤:
42.步骤一、识别待停车辆的车牌号,将待停车辆的车牌号与载车板1的车板号进行绑定;
43.步骤二、升降机2将载有待停车辆的载车板1转运至空闲停车位所在楼层;
44.步骤三、将载有待停车辆的载车板1从升降机2内转运至穿梭车3上,检测载车板1是否从升降机2内完全转运至穿梭车3上(若检测到升降机占位检测开关、后退到位开关9和后退减速开关8依次动作,则载车板1完全转运至穿梭车3上);
45.步骤四、确定载车板1从升降机2内完全转运至穿梭车3上后,穿梭车3将载有待停车辆的载车板1转运至空闲停车位;
46.步骤五、检测载车板1是否从穿梭车3上完全转运至空闲停车位(若检测到前进减速开关6、前进到位开关7和停车位占位检测开关依次动作或检测到后退减速开关8、后退到位开关9和停车位占位检测开关依次动作,则载车板1从穿梭车3上完全转运至空闲停车位内),确定载车板1从穿梭车3上完全转运至空闲停车位后,将待停车辆所在停车位的车位号与载车板1的车板号进行绑定。
47.针对上述停车库,本发明所设计的取车追踪控制方法包括以下步骤:
48.步骤一、输入待取车辆的车牌号,根据待取车辆的车牌号确定载有待取车辆的载车板1的车板号,根据载有待取车辆的载车板1的车板号确定待取车辆所在停车位的车位号;
49.步骤二、根据待停车辆所在停车位的车位号确定待取车辆的所在楼层,升降机2运动至待取车辆的所在楼层;
50.步骤三、穿梭车3根据待取车辆所在停车位的车位号运动至待取车辆所在的停车位,将载有待取车辆的载车板1从停车位转运至穿梭车3上,检测载车板1是否从停车位完全转运至穿梭车3上(若检测到停车位占位检测开关、前进到位开关7和前进减速开关6依次动作或检测到停车位占位检测开关、后退到位开关9和后退减速开关8依次动作,则载车板1从停车位4完全转运至穿梭车3上);
51.步骤四、确定载车板1从停车位完全转运至穿梭车3上后,穿梭车3将载有待取车辆的载车板1转运至升降机2内;
52.步骤五、检测穿梭车3是否将载有待取车辆的载车板1完全转运至升降机2内(若检测到后退减速开关8、后退到位开关9和升降机占位检测开关依次动作,则载车板1完全转运至升降机2内),确定载车板1从穿梭车3上完全转运至升降机2内后,升降机2将载有待取车辆的载车板1转运至取车位置。
53.本发明无需在载车板1、升降机2和穿梭车3上安装读写设备,只需以载车板1的车板号为基础,记录位于载车板1上的车辆的车牌号和车辆所在停车位的车位号即可得到所有车辆对应的停车位,追踪载车板1即可得到所有车辆的运动轨迹,对所有车辆进行停取车的智能调配。本发明所设计的停取车追踪控制方法提高了设备运行性能的稳定性,即使通讯过程中出现中断,也能迅速还原通讯中断前的操作,有效保证了追踪控制方法的准确性和稳定性,无需额外增加硬件结构,具有良好的经济价值和市场推广价值。
54.以上所述,仅是本发明的较佳实施例而已,并非对本发明的结构做任何形式上的限制。凡是依据本发明的技术实质对以上实施例所作的任何简单修改、等同变化与修饰,均仍属于本发明的技术方案的范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1