一种墙面粉刷装置的制作方法
本发明涉及墙面粉刷,具体为一种墙面粉刷装置。
背景技术:
1、现有对墙体进行抹灰的方式主要有两种,一种为人工抹灰,这就需要大量的抹灰工人,大幅增加了抹灰成本。另一种方式就是采用机械的方式对墙面进行抹灰。
2、现有专利(公开号:cn 105804376 b)公开了一种智能墙面抹灰机器人。所述智能墙面抹灰机器人,包括液压系统、底座立柱顶杆装置、升降框架装置、提升装置、平移装置、旋转装置、翻板装置,上述装置由设置在升降框架上的控制箱里面的arm控制器进行控制。本发明属于精密的智能墙面抹灰机械,适用于有一定倾斜度的墙面,墙面抹灰质量高,效率高,操作方便,具有较强的实用性。
3、在实现本发明的过程中,发明人发现现有技术中至少存在如下问题没有得到解决:目前的抹灰装置在移动位置抹灰时,需要人工操作,无法实现全自动抹灰过程,而且目前,很多外墙面上开具有窗户,现有的抹灰装置无法判断墙面上窗户(即不需要抹灰的位置)的位置,导致整个抹灰过程繁琐。
技术实现思路
1、本发明的目的在于提供一种墙面粉刷装置,以解决背景技术中所提出的问题。
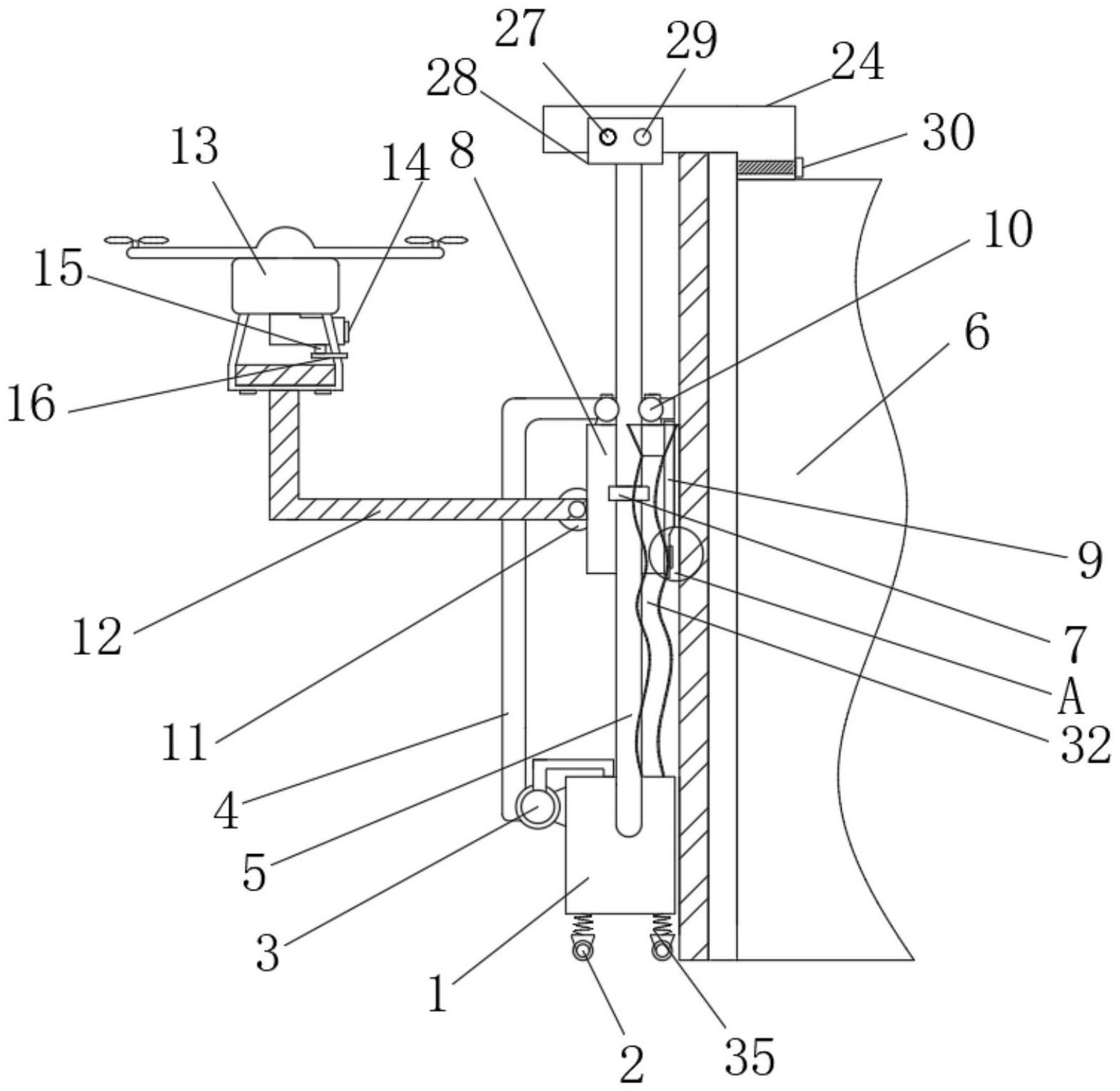
2、为实现上述目的,本发明提供如下技术方案:一种墙面粉刷装置,包括原料存储箱和数据处理终端,所述原料存储箱的底部设置有万向轮,所述原料存储箱的一侧安装有抽泵,所述抽泵的输入端与原料存储箱内腔连通,所述抽泵的输出端设置有柔性喷管,所述原料存储箱的前后两侧均安装有连杆,所述连杆的顶部设置有水平驱动机构,所述水平驱动机构的驱动端与连杆顶部连接,所述水平驱动机构的一侧设置有固定机构,所述连杆外侧的中部套设有滑环,两个所述滑环之间安装有安装座,所述安装座的一侧开设有凹槽,且凹槽内安装有水平推进装置,所述水平推进装置的驱动端设置有抹平板,所述安装座的顶部安装有第一水平驱动装置,所述第一水平驱动装置的驱动端与柔性喷管连接,所述安装座远离抹平板的一侧安装有第二水平驱动装置,所述第二水平驱动装置的驱动端安装有连接架,所述连接架远离第二水平驱动装置底端可拆卸式安装有无人机,所述无人机上设置有摄像装置和旋转驱动装置,所述旋转驱动装置的驱动端安装有测距单元;
3、所述数据处理终端包括窗户位置识别模块、未抹位置识别模块、数据存储模块、中央处理器、水平驱动装置驱动模块、无人机驱动模块和水平驱动机构驱动模块,所述摄像装置的信号输出端与未抹位置识别模块的信号输入端连接,所述测距单元的信号输出端与窗户位置识别模块的信号输入端连接,所述窗户识别模块和未抹位置识别模块均与数据存储模块电性连接,所述数据存储模块、水平驱动装置驱动模块、无人机驱动模块和水平驱动机构驱动模块均与中央处理器电性连接。
4、作为本发明的一种优选实施方式,所述水平驱动机构包括固定座,所述固定座的底部开设有凹槽,所述固定座的后侧安装有旋转电机,所述旋转电机的驱动端安装有螺杆,所述螺杆活动贯穿固定座至凹槽内,所述螺杆的外侧螺旋连接有滑块,所述凹槽的内部还安装有导杆,所述导杆活动贯穿于滑块。
5、作为本发明的一种优选实施方式,所述固定座呈l型,所述固定机构包括若干定位螺栓,若干所述定位螺栓均活动贯穿于固定座的右侧,且均与固定座通过螺旋旋接。
6、作为本发明的一种优选实施方式,所述固定安装与抹平板之间设置有导向座,所述导向座的顶部呈半圆状,所述导向座的两侧均设置有导向管,所述导向管的底部延伸至原料存储箱的顶部。
7、作为本发明的一种优选实施方式,所述第一水平驱动装置包括推杆电机和安装环,所述安装环固定安装在柔性喷管端部的外侧,所述安装管与推杆电机的驱动端连接。
8、一种墙面粉刷方法,采用一种墙面粉刷装置,包括以下步骤:
9、步骤一:将原料存储箱放置在墙面的拐角处,使得原料存储箱与墙面处于同一平面,且使得原料存储箱的一侧与墙面的边侧不重合;
10、步骤二:控制无人机起飞,使得无人机带动安装座上移,直至安装座到位,同时,测距单元和摄像装置启用,测距单元的数据变化可以判定无人机的该条路径相对应的墙面上是否存在窗户,摄像装置则拍摄图片进行颜色分析,判断该位置是否存在未粉刷位置;
11、步骤三:无人机该条路径的相对应墙面检测完成后,无人机复位,同时,通过水平驱动机构带动原料存储箱侧移,使得抹平板与前述无人机行驶路径相对应的墙面相抵,同时抽泵启动,抽泵将原料抽出至抹平板上,无人机继续上移,带动抹平板和喷管完成该墙面位置的粉刷工作,同时,由于无人机与原料存储箱错开,在无人机带动抹平板上移时,摄像装置和测距单元进行这次路径相对应墙面的检测,以此往复上述过程,直至完成整个墙面的粉刷。
12、作为本发明的一种优选实施方式,还包括步骤四:墙面粉刷完成后,通过第二水平驱动装置控制无人机移动至原料存储箱的另一侧,此时控制无人机起飞,使得无人机带动安装座上移,直至安装座到位,同时,摄像装置启用,摄像装置可以检测无人机的该条路径相对应的墙面上是否存在未粉刷部位,测距单元16则检测厚度不足的部位,若存在,则控制无人机复位,同时,通过水平驱动机构带动原料存储箱往存在未粉刷部位的一侧移动,同时,无人机再次移动到存在未粉刷部位的高度位置下方时,启动抽泵,抽泵将原料抽出至抹平板上,无人机继续上移,带动抹平板和喷管完成该墙面位置的修补工作,以此往复上述过程,直至完成整个墙面的修补。
13、作为本发明的一种优选实施方式,所述步骤二中,测距单元的数据变化可以判定无人机的该条路径相对应的墙面上是否存在窗户的具体过程为:当测距单元第一次发生数据变化时,则表示无人机达到窗户的相同高度,此时通过旋转驱动装置分别顺时针和逆时针转动测距单元一次,当测距单元的数据变化为逐渐减少后的增加,则可以判定最小值为窗户的边侧外端位置,根据两个外端位置、测距传感器未被旋转时的两次数据变化以及两次数据变化的时间以及无人机的速度,可以得到窗户尺寸以及位置的数据,根据该数据,粉刷墙面时,可以错开窗户进行粉刷。
14、与现有技术相比,本发明提供了一种墙面粉刷装置,具备以下有益效果:
15、该一种墙面粉刷装置,通过设置的无人机、摄像装置和测距单元,在使用时,可以通过无人机带动摄像装置和测距单元对需要粉刷的墙面进行检测,当测距单元第一次发生数据变化时,则表示无人机达到窗户的相同高度,此时通过旋转驱动装置分别顺时针和逆时针转动测距单元一次,当测距单元的数据变化为逐渐减少后的增加,则可以判定最小值为窗户的边侧外端位置,根据两个外端位置、测距传感器未被旋转时的两次数据变化以及两次数据变化的时间以及无人机的速度,可以得到窗户尺寸以及位置的数据,根据该数据,粉刷墙面时,可以错开窗户进行粉刷,避免减少原料的浪费,除以以外,利用摄像装置对墙面的颜色进行分析,可以实现本装置的全自动抹灰过程,使用效果极佳。
技术特征:
1.一种墙面粉刷装置,包括原料存储箱(1)和数据处理终端,其特征在于:所述原料存储箱(1)的底部设置有万向轮(2),所述原料存储箱(1)的一侧安装有抽泵(3),所述抽泵(3)的输入端与原料存储箱(1)内腔连通,所述抽泵(3)的输出端设置有柔性喷管(4),所述原料存储箱(1)的前后两侧均安装有连杆(5),所述连杆(5)的顶部设置有水平驱动机构,所述水平驱动机构的驱动端与连杆(5)顶部连接,所述水平驱动机构的一侧设置有固定机构,所述连杆(5)外侧的中部套设有滑环(7),两个所述滑环(7)之间安装有安装座(8),所述安装座(8)的一侧开设有凹槽,且凹槽内安装有水平推进装置(43),所述水平推进装置(43)的驱动端设置有抹平板(9),所述安装座(8)的顶部安装有第一水平驱动装置(10),所述第一水平驱动装置(10)的驱动端与柔性喷管(4)连接,所述安装座(8)远离抹平板(9)的一侧安装有第二水平驱动装置(11),所述第二水平驱动装置(11)的驱动端安装有连接架(12),所述连接架(12)远离第二水平驱动装置(11)底端可拆卸式安装有无人机(13),所述无人机(13)上设置有摄像装置(14)和旋转驱动装置(15),所述旋转驱动装置(15)的驱动端安装有测距单元(16);
2.根据权利要求1所述的一种墙面粉刷装置,其特征在于:所述水平驱动机构包括固定座(24),所述固定座(24)的底部开设有凹槽(25),所述固定座(24)的后侧安装有旋转电机(26),所述旋转电机(26)的驱动端安装有螺杆(27),所述螺杆(27)活动贯穿固定座(24)至凹槽(25)内,所述螺杆(27)的外侧螺旋连接有滑块(28),所述凹槽(25)的内部还安装有导杆(29),所述导杆(29)活动贯穿于滑块(28)。
3.根据权利要求2所述的一种墙面粉刷装置,其特征在于:所述固定座(24)呈l型,所述固定机构包括若干定位螺栓(30),若干所述定位螺栓(30)均活动贯穿于固定座(24)的右侧,且均与固定座(24)通过螺旋旋接。
4.根据权利要求1所述的一种墙面粉刷装置,其特征在于:所述固定安装与抹平板(9)之间设置有导向座(31),所述导向座(31)的顶部呈半圆状,所述导向座(31)的两侧均设置有导向管(32),所述导向管(32)的底部延伸至原料存储箱(1)的顶部。
5.根据权利要求1所述的一种墙面粉刷装置,其特征在于:所述第一水平驱动装置(10)包括推杆电机(33)和安装环(34),所述安装环(34)固定安装在柔性喷管(4)端部的外侧,所述安装管与推杆电机(33)的驱动端连接。
6.根据权利要求1所述的一种墙面粉刷装置,其特征在于:所述万向轮(2)的顶部设置有弹簧(35),且所述万向轮通过弹簧(35)与原料存储箱(1)的底部连接。
7.根据权利要求1所述的一种墙面粉刷装置,其特征在于:所述原料存储箱(1)包括箱体(36)和盖体(37),所述盖体(37)通过螺纹与箱体(36)的顶部螺旋连接,所述箱体(36)内部的一角设置有伺服电机(38),所述伺服电机(38)的驱动端安装有第二螺杆(39),所述第二螺杆(39)的外侧螺旋连接有挤压板(42),所述挤压板(42)上设置有原料容器(41),所述箱体(36)内部的另一角设置有第二导杆(40),所述第二导杆(40)竖直活动贯穿于挤压板(42),所述抽泵(3)的输入端贯穿盖体(37)延伸至原料容器(41)内。
8.根据权利要求1所述的一种墙面粉刷装置,其特征在于:所述抹平板(9)的下方开设有安装槽(44),所述安装槽(44)的内部设置有第二测距单元(45)。
9.一种墙面粉刷方法,采用权利要求1-7任一项所述的一种墙面粉刷装置,其特征在于:包括以下步骤:
10.根据权利要求9所述的一种墙面粉刷方法,其特征在于:所述步骤二中,测距单元(16)的数据变化可以判定无人机(13)的该条路径相对应的墙面上是否存在窗户的具体过程为:当测距单元(16)第一次发生数据变化时,则表示无人机(13)达到窗户的相同高度,此时通过旋转驱动装置(15)分别顺时针和逆时针转动测距单元(16)一次,当测距单元(16)的数据变化为逐渐减少后的增加,则可以判定最小值为窗户的边侧外端位置,根据两个外端位置、测距传感器未被旋转时的两次数据变化以及两次数据变化的时间以及无人机(13)的速度,可以得到窗户尺寸以及位置的数据,根据该数据,粉刷墙面时,可以错开窗户进行粉刷。
技术总结
本发明涉及墙面粉刷技术领域,公开了一种墙面粉刷装置,包括原料存储箱和数据处理终端,所述原料存储箱的底部设置有万向轮,所述原料存储箱的一侧安装有抽泵,所述抽泵的输入端与原料存储箱内腔连通,所述抽泵的输出端设置有柔性喷管,所述原料存储箱的前后两侧均安装有连杆。本发明通过设置的无人机、摄像装置和测距单元,在使用时,可以通过无人机带动摄像装置和测距单元对需要粉刷的墙面进行检测,不仅可以错开窗户进行粉刷,避免减少原料的浪费,而且可以利用摄像装置对墙面的颜色进行分析,可以实现本装置的全自动抹灰过程,使用效果极佳。
技术研发人员:殷健,陈兴生
受保护的技术使用者:苏州美尔邦纳米材料有限公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!