一种游泳池机器人脱困方法、系统及介质与流程
本发明涉及机器人,特别涉及一种游泳池机器人脱困方法、系统及介质。
背景技术:
1、游泳池清洁机器人是属于家用级消费机器人,其用于清洁泳池,功能与扫地机器人类似,与扫地机器人不同的是,泳池清洁机器人的应用场景为水下,需要在游泳池中进行工作,对于泳池清理一直都是一个痛点,人工去清理繁琐费时间,行业普遍开始使用机器进行泳池的清理工作,很多公司都在研究路径规划相关的算法,让机器按照设定好的路线去清理泳池,达到更高的清理效率。
2、目前市面上的清洁机器人缺少一些脱困算法,有时候泳池底部存在一些石头或者凸起的障碍物,就会把机器底盘卡住,导致机器无法走动,如果不能有效的检测识别出来,也没进行特殊的处理,机器就会一直停留在一个地方,,难以开展正常的清理工作。
技术实现思路
1、本发明的主要目的在于提出一种游泳池机器人脱困方法、系统及介质,旨在提升游泳池机器人的脱困能力和游泳池机器人对于不同环境的适应性。
2、为实现上述目的,本发明提供了一种游泳池机器人脱困方法,所述方法包括以下步骤:
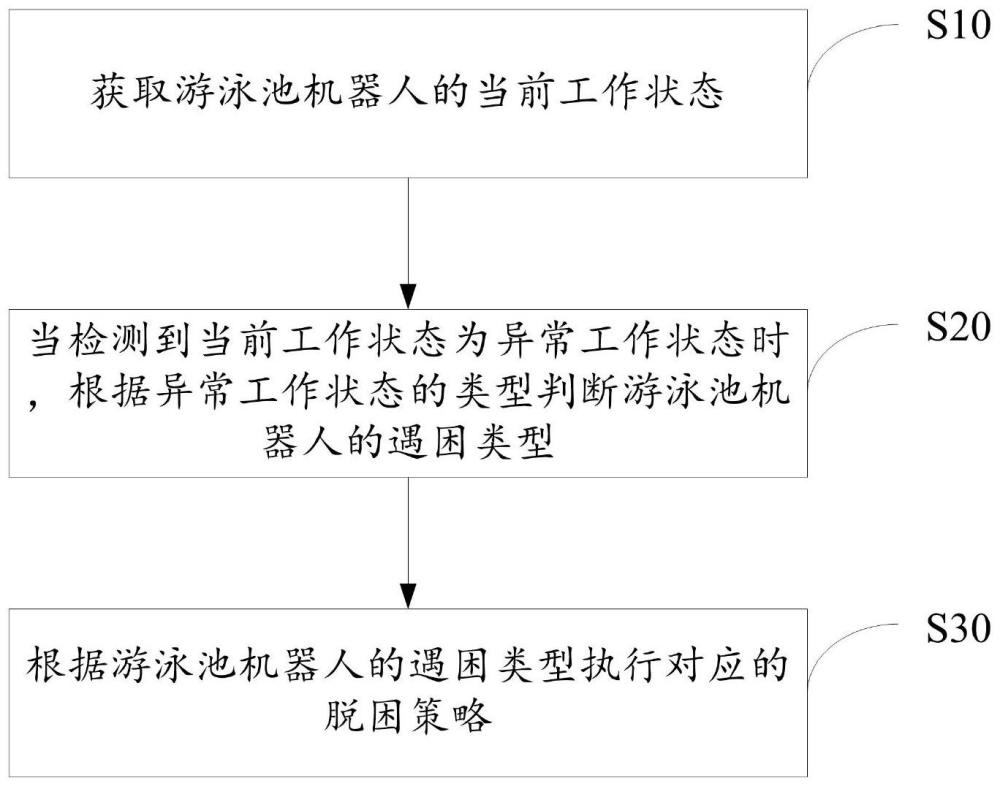
3、步骤s10,获取游泳池机器人的当前工作状态;
4、步骤s20,当检测到所述当前工作状态为异常工作状态时,根据所述异常工作状态的类型判断所述游泳池机器人的遇困类型;
5、步骤s30,根据所述游泳池机器人的遇困类型执行对应的脱困策略。
6、本发明进一步的技术方案是,所述步骤s20,当检测到所述当前工作状态为异常工作状态时,根据所述异常工作状态的类型判断所述游泳池机器人的遇困类型的步骤包括:
7、步骤s201,若所述异常工作状态的类型为偏离设定的航向,则判断所述游泳池机器人的遇困类型为受到外部障碍物卡住。
8、本发明进一步的技术方案是,所述游泳池机器人设置有抽水电机,当开启所述抽水电机时,所述游泳池机器人与游泳池底的压力增大,当关闭所述抽水电机时,所述游泳池机器人与游泳池底的压力减小;
9、所述步骤s30,根据所述游泳池机器人的遇困类型执行对应的脱困策略的步骤包括:
10、步骤s301,关闭所述抽水电机,控制所述游泳池机器人前进第一预设时长以越过障碍物。
11、本发明进一步的技术方案是,所述第一预设时长为3至30秒。
12、本发明进一步的技术方案是,所述步骤s20,当检测到所述当前工作状态为异常工作状态时,根据所述异常工作状态的类型判断所述游泳池机器人的遇困类型的步骤包括:
13、步骤s202,若所述异常工作状态的类型为所述游泳池机器人前进时与游泳池墙壁之间的距离不变或者变化不大,则判断所述游泳池机器人遇到无法前进的障碍物。
14、本发明进一步的技术方案是,所述步骤s30,根据所述游泳池机器人的遇困类型执行对应的脱困策略的步骤包括:
15、步骤s302,控制所述游泳池机器人后退第二预设时长,然后控制所述游泳池机器人转向运动。
16、本发明进一步的技术方案是,所述第二预设时长为2至20秒。
17、本发明进一步的技术方案是,所述游泳池机器人设置有imu传感器、加速度传感器和超声波传感器,所述imu传感器和所述加速度传感器用于获取所述游泳池机器人的运动状态和姿态角度,根据所述姿态角度调节所述游泳池机器人的航向角度;所述超声波传感器用于检测所述游泳池机器人与游泳池墙壁之间的距离。
18、为实现上述目的,本发明还提出一种游泳池机器人脱困系统,所述系统包括存储器、处理器以及存储在所述处理器上的游泳池机器人脱困程序,所述游泳池机器人脱困程序被所述处理器运行时执行如上所述的方法的步骤。
19、为实现上述目的,本发明还提出一种计算机可读存储介质,所述计算机可读存储介质上存储有游泳池机器人脱困程序,所述游泳池机器人脱困程序被处理器运行时执行如上所述的方法的步骤。
20、本发明游泳池机器人脱困方法、系统及介质的有益效果是:
21、本发明游泳池机器人脱困方法通过上述技术方案,获取游泳池机器人的当前工作状态;当检测到当前工作状态为异常工作状态时,根据异常工作状态的类型判断游泳池机器人的遇困类型;根据游泳池机器人的遇困类型执行对应的脱困策略,能够提升游泳池机器人的脱困能力,防止游泳池机器人长时间卡在某一个地方不动,进而提升游泳池机器人对于不同环境的适应性,可在更多游泳池正常进行清理工作。
技术特征:
1.一种游泳池机器人脱困方法,其特征在于,所述方法包括以下步骤:
2.根据权利要求1所述的游泳池机器人脱困方法,其特征在于,所述步骤s20,当检测到所述当前工作状态为异常工作状态时,根据所述异常工作状态的类型判断所述游泳池机器人的遇困类型的步骤包括:
3.根据权利要求2所述的游泳池机器人脱困方法,其特征在于,所述游泳池机器人设置有抽水电机,当开启所述抽水电机时,所述游泳池机器人与游泳池底的压力增大,当关闭所述抽水电机时,所述游泳池机器人与游泳池底的压力减小;
4.根据权利要求3所述的游泳池机器人脱困方法,其特征在于,所述第一预设时长为3至30秒。
5.根据权利要求1所述的游泳池机器人脱困方法,其特征在于,所述步骤s20,当检测到所述当前工作状态为异常工作状态时,根据所述异常工作状态的类型判断所述游泳池机器人的遇困类型的步骤包括:
6.根据权利要求5所述的游泳池机器人脱困方法,其特征在于,所述步骤s30,根据所述游泳池机器人的遇困类型执行对应的脱困策略的步骤包括:
7.根据权利要求5所述的游泳池机器人脱困方法,其特征在于,所述第二预设时长为2至20秒。
8.根据权利要求1至7任意一项所述的游泳池机器人脱困方法,其特征在于,所述游泳池机器人设置有imu传感器、加速度传感器和超声波传感器,所述imu传感器和所述加速度传感器用于获取所述游泳池机器人的运动状态和姿态角度,根据所述姿态角度调节所述游泳池机器人的航向角度;所述超声波传感器用于检测所述游泳池机器人与游泳池墙壁之间的距离。
9.一种游泳池机器人脱困系统,所述系统包括存储器、处理器以及存储在所述处理器上的游泳池机器人脱困程序,所述游泳池机器人脱困程序被所述处理器运行时执行如权利要求1至8任意一项所述的方法的步骤。
10.一种计算机可读存储介质,其特征在于,所述计算机可读存储介质上存储有游泳池机器人脱困程序,所述游泳池机器人脱困程序被处理器运行时执行如权利要求1至8任意一项所述的方法的步骤。
技术总结
本发明公开了一种游泳池机器人脱困方法、系统及介质,该方法包括以下步骤:获取游泳池机器人的当前工作状态;当检测到当前工作状态为异常工作状态时,根据异常工作状态的类型判断游泳池机器人的遇困类型;根据游泳池机器人的遇困类型执行对应的脱困策略。本发明能够提升游泳池机器人的脱困能力,防止游泳池机器人长时间卡在某一个地方不动,进而提升游泳池机器人对于不同环境的适应性,可在更多游泳池正常进行清理工作。
技术研发人员:邓智能,徐纬宾
受保护的技术使用者:深圳市思傲拓科技有限公司
技术研发日:
技术公布日:2024/3/24
- 还没有人留言评论。精彩留言会获得点赞!