一种智能化侧墙大钢模施工体系及方法与流程
本发明涉及建筑工程,尤其涉及一种智能化侧墙大钢模施工体系及方法。
背景技术:
1、在办公性质的庭院式建筑中,一般需设置2个疏散通道,现有建筑中,疏散通道多为预留开放式门洞或设置封闭式门,预留开放式门洞无法保证庭院主人安全性和私密性,封闭式门一般为铝合金门、木门、金属门等,这些门单独设置在院墙上,和中式庭院整体风格不相符,影响建筑外立面整体美观。
技术实现思路
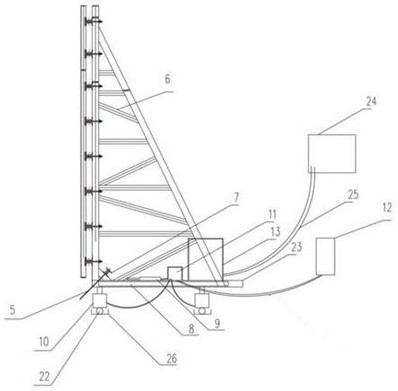
1、本发明目的在于针对现有技术的不足,提供一种智能化侧墙大钢模施工体系,包括钢模板支撑三角桁架、纵向移动机构、横向伸缩式液压缸、纵向伸缩式液压缸、测量调控系统和荷载平衡系统;所述钢模板支撑三角桁架的钢模板由面板、竖向肋板和横向肋板组成,钢模板支撑三角桁架的三角桁架由槽钢组成,三角桁架底部直角边为伸缩梁,三角桁架底部设有框架式圈梁,伸缩梁与框架式圈梁使用高强螺栓可靠固定,所述横向伸缩式液压缸设置在三角桁架底梁的伸缩梁上,与钢模板垂直方向布置,其活塞杆端部与三角桁架固定,横向伸缩式液压缸伸缩工作带动三角桁架移动,所述竖向伸缩式液压缸位于框架式圈梁四角,用以升降钢模板支撑三角桁架;所述纵向移动机构包括驱动电机、行走轮及导轨,所述导轨沿待施工侧墙平行方向铺设,所述驱动电机安装在三角桁架底部,用以驱动三角桁架移动,所述行走轮与驱动电机相连且置于导轨内;所述测量调控系统控制横向伸缩式液压缸和纵向伸缩式液压缸的工作行程,进而对钢模板支撑三角桁架进行调整,从而满足钢模板垂直度和空间位置要求;所述荷载平衡系统用于平衡钢模板横向移动产生的力矩荷载,保证三角桁架稳定。
2、优选地,所述钢模板间通过高强螺栓连接,钢模板与三角桁架间焊接固定。
3、优选地,所述测量调控系统包括激光传感器、控制柜、液压泵、和位移传感器,所述控制柜为预先编程的控制器,输入两种伸缩式液压缸的移动距离后,所述液压泵接收控制柜的指令增加或降低压力,结合位移传感器的数据反馈,精确控制伸缩式液压缸(横向、竖向)的工作行程,进而对钢模板支撑三角桁架进行调整,使用激光传感器获得钢模板上下端相对位置,将数据带入编程模型,得到需要伸缩式液压缸调整行程的具体数值,将该数值导入上述控制器进而实现钢模板支撑三角桁架的调整。
4、优选地,所述荷载平衡系统包括压梁、荷载箱、蓄水池和阀门控制系统,所述压梁设置在三角桁架底部远离钢模板侧,连接两个三角桁架;所述荷载箱设置在压梁上,荷载箱底部侧边设有进水/排水孔,相邻荷载箱进水/排水孔可相互连接贯通,荷载箱与蓄水池通过水管连接,通过阀门控制系统工作为荷载箱中注入或排出水。
5、优选地,所述阀门控制系统包括测量调控系统内的位移传感器和控制柜、流量计、阀门,所述位移传感器设置在三角桁架底部伸缩梁上,将伸缩梁移动距离传输至控制柜,分析处理端根据荷载平衡原理(k×g1×l1=g2×l2,g2=b×l×h×ρ水;g1为端头大钢模重量,厂家制作时已知;l1为变量,数值为端头大钢模至第一竖向伸缩式液压缸距离,由位移传感器获得;g2为水箱内水的重量,b×l×h为水箱内水的体积,;l2为水箱重心至第一竖向伸缩式液压缸距离;k为安全系数,宜取1.1~1.25)计算得出平衡钢模板所需荷载,通过控制荷载箱中水量进行荷载平衡。
6、优选地,还包括埋件系统,所述埋件系统包括预埋地脚螺栓、连接螺母、外连杆、垫片,所述预埋地脚螺栓预埋在侧墙腋角部位处与地面平行的同一直线,预埋角度与腋角斜面垂直;所述预埋地脚螺栓外露端顶部通过套筒与外连杆连接,外连杆另一端通过两套垫片和连接螺母与钢模板支架端立面底部压梁可靠固定,所述外连杆与压梁固定顺序为连接螺母、垫片、压梁、垫片、连接螺母,使得埋件系统既能承受拉应力,也能承受压应力。
7、优选地,所述竖向伸缩式液压缸底部焊接安装有行走轮,竖向伸缩式液压缸顶部与框架式圈梁可靠固接。
8、一种智能化侧墙大钢模施工方法,包括如下步骤:
9、步骤一:埋件系统预埋:根据车站侧墙设计位置,在结构板钢筋绑扎时预埋地脚螺栓;结构板浇筑并养护完成后,在板上铺设导轨;
10、步骤二:进行钢模板支撑桁架的拼装;
11、步骤三:在圈梁四角处设置纵向伸缩式液压缸并将框架式圈梁铺设在导轨上,将拼装完成后的钢模板支撑三角桁架吊放、叉运至框架式圈梁上,将三角桁架底梁的伸缩梁与框架式圈梁高强螺栓固定;在三角桁架底梁的伸缩梁上设置横向伸缩式液压缸,与钢模板垂直方向布置,其输出端与三角桁架固定;在三角桁架底部安装驱动电机并与行走轮连接;将荷载箱安装至压梁上并联通水管进行注水;
12、步骤四:发动驱动电机,驱动首块钢模板支撑桁架向待施工侧墙远端移动一个钢模板支撑桁架拼装工作面;
13、步骤五:重复步骤三,并将两相邻钢模板用高强螺栓连接;发动驱动电机,驱动首块、第二块钢模板支撑桁架向待施工侧墙远端移动一个钢模板支撑桁架拼装工作面;每4块三角桁架安装一部驱动电机,用以驱动桁架移动;重复步骤三、步骤四,直至钢模板支撑桁架均设置到位;
14、步骤六:将竖向伸缩式液压缸顶进,抬升钢模板支撑桁架至需要高度,然后顶进横向伸缩式液压缸,使钢模板到达现有车站侧墙浇筑边线,此时需同步进行荷载箱中注水施工,以保证前后荷载平衡;根据监测情况,对钢模板垂直度进行微调,完成后将预埋在车站板腋角位置的地脚螺栓与三角桁架底部压梁连接紧固;
15、步骤七:待侧墙混凝土浇筑完成达到强度后,先收回横向伸缩式液压缸,此时同步进行荷载箱中排水工作,然后收回竖向伸缩式液压缸,完成该段侧墙施工,启动驱动电机,将钢模板支撑桁架移动向下一施工区域,当遇到侧墙截面或者腋角尺寸发生变化时,可通过调整纵向、横向液压千斤顶顶进距离调整钢模板位置,配合测量调控系统使得大钢模位置满足设计要求。
16、与现有技术相比,本发明的有益效果为:
17、1、运输安装相对简单,整体性好,偏于现场施工作业;
18、2、一次制作后可循环使用,经济性好,节约资源;
19、3、可通过横向/竖向伸缩式液压缸调节钢模板位置,对于变截面及高大腋角等侧墙施工适应性强,解决了现场施工难点;
20、4、可根据现场施工需要智能调节模板高度和垂直度,节约了人工调整的时间,安全性高。
技术特征:
1.一种智能化侧墙大钢模施工体系,其特征在于:包括钢模板支撑三角桁架、纵向移动机构、横向伸缩式液压缸、纵向伸缩式液压缸、测量调控系统和荷载平衡系统;所述钢模板支撑三角桁架的钢模板由面板、竖向肋板和横向肋板组成,钢模板支撑三角桁架的三角桁架由槽钢组成,三角桁架底部直角边为伸缩梁,三角桁架底部设有框架式圈梁,伸缩梁与框架式圈梁使用高强螺栓可靠固定,所述横向伸缩式液压缸设置在三角桁架底梁的伸缩梁上,与钢模板垂直方向布置,其活塞杆端部与三角桁架固定,横向伸缩式液压缸伸缩工作带动三角桁架移动,所述竖向伸缩式液压缸位于框架式圈梁四角,用以升降钢模板支撑三角桁架;所述纵向移动机构包括驱动电机、行走轮及导轨,所述导轨沿待施工侧墙平行方向铺设,所述驱动电机安装在三角桁架底部,用以驱动三角桁架移动,所述行走轮与驱动电机相连且置于导轨内;所述测量调控系统控制横向伸缩式液压缸和纵向伸缩式液压缸的工作行程,进而对钢模板支撑三角桁架进行调整,从而满足钢模板垂直度和空间位置要求;所述荷载平衡系统用于平衡钢模板横向移动产生的力矩荷载,保证三角桁架稳定。
2.根据权利要求1所述的一种智能化侧墙大钢模施工体系,其特征在于:所述钢模板间通过高强螺栓连接,钢模板与三角桁架间焊接固定。
3.根据权利要求2所述的一种智能化侧墙大钢模施工体系,其特征在于:所述测量调控系统包括激光传感器、控制柜、液压泵、和位移传感器,所述控制柜为预先编程的控制器,输入两种伸缩式液压缸的移动距离后,所述液压泵接收控制柜的指令增加或降低压力,结合位移传感器的数据反馈,精确控制伸缩式液压缸(横向、竖向)的工作行程,进而对钢模板支撑三角桁架进行调整,使用激光传感器获得钢模板上下端相对位置,将数据带入编程模型,得到需要伸缩式液压缸调整行程的具体数值,将该数值导入上述控制器进而实现钢模板支撑三角桁架的调整。
4.根据权利要求3所述的一种智能化侧墙大钢模施工体系,其特征在于:所述荷载平衡系统包括压梁、荷载箱、蓄水池和阀门控制系统,所述压梁设置在三角桁架底部远离钢模板侧,连接两个三角桁架;所述荷载箱设置在压梁上,荷载箱底部侧边设有进水/排水孔,相邻荷载箱进水/排水孔可相互连接贯通,荷载箱与蓄水池通过水管连接,通过阀门控制系统工作为荷载箱中注入或排出水。
5.根据权利要求4所述的一种智能化侧墙大钢模施工体系,其特征在于:所述阀门控制系统包括测量调控系统内的位移传感器和控制柜、流量计、阀门,所述位移传感器设置在三角桁架底部伸缩梁上,将伸缩梁移动距离传输至控制柜,分析处理端根据荷载平衡原理(k×g1×l1=g2×l2,g2=b×l×h×ρ水;g1为端头大钢模重量,厂家制作时已知;l1为变量,数值为端头大钢模至第一竖向伸缩式液压缸距离,由位移传感器获得;g2为水箱内水的重量,b×l×h为水箱内水的体积,;l2为水箱重心至第一竖向伸缩式液压缸距离;k为安全系数,宜取1.1~1.25)计算得出平衡钢模板所需荷载,通过控制荷载箱中水量进行荷载平衡。
6.根据权利要求5所述的一种智能化侧墙大钢模施工体系,其特征在于:还包括埋件系统,所述埋件系统包括预埋地脚螺栓、连接螺母、外连杆、垫片,所述预埋地脚螺栓预埋在侧墙腋角部位处与地面平行的同一直线,预埋角度与腋角斜面垂直;所述预埋地脚螺栓外露端顶部通过套筒与外连杆连接,外连杆另一端通过两套垫片和连接螺母与钢模板支架端立面底部压梁可靠固定,所述外连杆与压梁固定顺序为连接螺母、垫片、压梁、垫片、连接螺母,使得埋件系统既能承受拉应力,也能承受压应力。
7.根据权利要求6所述的一种智能化侧墙大钢模施工体系,其特征在于:所述竖向伸缩式液压缸底部焊接安装有行走轮,竖向伸缩式液压缸顶部与框架式圈梁可靠固接。
8.一种智能化侧墙大钢模施工方法,其特征在于,包括如下步骤:
技术总结
本发明公开一种智能化侧墙大钢模施工体系及方法,包括钢模板支撑三角桁架、纵向移动机构、横向伸缩式液压缸、纵向伸缩式液压缸、测量调控系统和荷载平衡系统;所述钢模板支撑三角桁架的钢模板由面板、竖向肋板和横向肋板组成,所述横向伸缩式液压缸设置在三角桁架底梁的伸缩梁上,横向伸缩式液压缸伸缩工作带动三角桁架移动,所述竖向伸缩式液压缸用以升降钢模板支撑三角桁架;所述纵向移动机构用以驱动三角桁架移动;所述测量调控系统对钢模板支撑三角桁架进行调整;所述荷载平衡系统用于平衡钢模板横向移动产生的力矩荷载,本发明可根据现场施工需要智能调节模板高度和垂直度,节约了人工调整的时间,安全性高。
技术研发人员:庞景宝,谢翊,鲍闯,何义,范小叶,全有维,刘常泉,邓向振,李敏,邢文康,曹天航
受保护的技术使用者:中建八局第三建设有限公司
技术研发日:
技术公布日:2024/2/29
- 还没有人留言评论。精彩留言会获得点赞!