一种建筑砌墙机器人的制作方法
本技术涉及建筑砌墙机器人设备,具体来说,涉及一种建筑砌墙机器人。
背景技术:
1、建筑在进行建造的过程中,必不可少的需要进行砌墙,砌墙即通过砌体砖通过水泥砂浆进行粘接而组成的墙体,现在为了更好的提高工程的建设效率,一般通过砌墙机器人来进行使用,如授权公告号为cn210713890u提到的一种应用于建筑工程的智能砌墙机器人,在使用时,可以通过爪板进行抓取砌体砖,且可以对爪板进行拆卸,但是在该装置中,对爪板的拆卸替换较为缓慢,操作较为复杂,不利于推广使用。
2、现有的如授权公告号为cn210713890u提到的一种应用于建筑工程的智能砌墙机器人,在使用时,不能更快速的对爪板进行替换,且爪板在抓取砌体砖时,表面残留的碎屑不能便捷及时的进行清理,在下一次抓取砌体砖时,碎屑与砌体砖进行挤压,造成碎屑的迸溅,对操作人员进行伤害。
3、针对相关技术中的问题,目前尚未提出有效的解决方案。
技术实现思路
1、针对相关技术中的问题,本实用新型提出一种建筑砌墙机器人,以克服现有相关技术所存在的上述技术问题。
2、为此,本实用新型采用的具体技术方案如下:
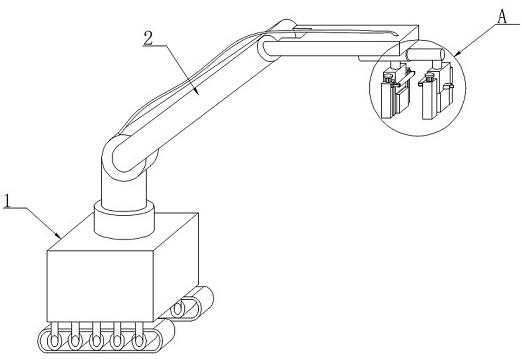
3、一种建筑砌墙机器人,包括机体以及机体上方设有的转动臂,所述转动臂底部固定连接有电动推杆,所述电动推杆套筒端底部与所述电动推杆伸缩端底部均固定连接有连接柱,所述连接柱底部表面固定连接有固定盒,两个所述固定盒背对侧表面均固定连接有限位盒,所述限位盒内腔设有移动板,所述移动板远离于所述固定盒一侧表面固定连接有限位弹簧,所述移动板远离于所述固定盒一侧表面贯穿固定连接有限位柱,所述固定盒内腔设有爪板,所述固定盒后侧表面固定连接有卡嵌盒,所述固定盒前侧表面固定连接有上下盒,所述上下盒顶部固定连接有伺服电机,所述上下盒一侧与所述卡嵌盒一侧均设有运动板,所述运动板一侧表面均固定连接有支撑杆,所述支撑杆一侧表面通过轴承活动连接有尼龙毛刷辊。
4、作为优选,所述上下盒内腔设有螺纹柱,所述螺纹柱一端固定连接在所述伺服电机输出端,所述螺纹柱远离于所述伺服电机一端通过轴承活动连接于所述上下盒。
5、作为优选,所述运动板远离于所述支撑杆一侧表面固定连接有滑动块,所述滑动块水平剖面呈t型结构,所述上下盒一侧表面与所述卡嵌盒一侧表面均开设有与所述滑动块结构尺寸相匹配的滑槽。
6、作为优选,所述爪板前后侧表面固定连接有插入块,所述固定盒底部表面开设有与所述插入块结构尺寸相匹配的凹槽。
7、作为优选,所述爪板靠近所述限位盒一侧表面开设有限位孔,所述限位孔与所述限位柱结构尺寸相匹配。
8、作为优选,所述爪板数量为两个,两个所述爪板相对侧表面固定连接有防滑软质层。
9、本实用新型的有益效果为:通过设有限位盒、移动板、限位弹簧、限位柱、爪板一侧设有限位孔以及在爪板前后侧表面固定连接有插入块,可以更便捷的对爪板进行拆卸替换,便于操作,使用时,直接拉动限位柱,此时限位柱与移动板整体发生移动,限位弹簧发生形变,此时限位柱离开爪板表面的限位孔中,然后将旧的爪板取下,同样的拉动限位柱,然后将新的爪板通过插入块卡嵌插入在固定盒中,然后松开限位柱,此时限位弹簧恢复原状,带动移动板与限位柱的运动,将限位柱插入在限位孔中,完成对新的爪板的限位,进一步的,通过设有伺服电机、上下盒、螺纹柱、卡嵌盒、运动板、滑动块、支撑杆与尼龙毛刷辊,可以更好的对爪板表面进行刷拭,将砌体砖碎屑刷落,保证爪板的清洁,从而防止爪板在抓取砌体砖时,碎屑被压碎进行迸溅,对操作人员造成伤害,使用时,通过伺服电机带动螺纹柱的旋转,此时由于上下盒一侧表面的运动板上固定连接的滑动块套嵌在螺纹柱外侧表面,此时运动板与滑动块整体会随着螺纹柱的旋转而进行上下运动,即两个运动板同时在上下盒表面与卡嵌盒表面进行上下滑动,从而使尼龙毛刷辊对爪板表面进行刷拭。
技术特征:
1.一种建筑砌墙机器人,其特征在于,包括机体(1)以及机体(1)上方设有的转动臂(2),所述转动臂(2)底部固定连接有电动推杆(3),所述电动推杆(3)套筒端底部与所述电动推杆(3)伸缩端底部均固定连接有连接柱(4),所述连接柱(4)底部表面固定连接有固定盒(5),两个所述固定盒(5)背对侧表面均固定连接有限位盒(6),所述限位盒(6)内腔设有移动板(7),所述移动板(7)远离于所述固定盒(5)一侧表面固定连接有限位弹簧(8),所述移动板(7)远离于所述固定盒(5)一侧表面贯穿固定连接有限位柱(9),所述固定盒(5)内腔设有爪板(10),所述固定盒(5)后侧表面固定连接有卡嵌盒(11),所述固定盒(5)前侧表面固定连接有上下盒(12),所述上下盒(12)顶部固定连接有伺服电机(13),所述上下盒(12)一侧与所述卡嵌盒(11)一侧均设有运动板(14),所述运动板(14)一侧表面均固定连接有支撑杆(15),所述支撑杆(15)一侧表面通过轴承活动连接有尼龙毛刷辊(16)。
2.根据权利要求1所述的一种建筑砌墙机器人,其特征在于,所述上下盒(12)内腔设有螺纹柱(17),所述螺纹柱(17)一端固定连接在所述伺服电机(13)输出端,所述螺纹柱(17)远离于所述伺服电机(13)一端通过轴承活动连接于所述上下盒(12)。
3.根据权利要求1所述的一种建筑砌墙机器人,其特征在于,所述运动板(14)远离于所述支撑杆(15)一侧表面固定连接有滑动块(18),所述滑动块(18)水平剖面呈t型结构,所述上下盒(12)一侧表面与所述卡嵌盒(11)一侧表面均开设有与所述滑动块(18)结构尺寸相匹配的滑槽。
4.根据权利要求1所述的一种建筑砌墙机器人,其特征在于,所述爪板(10)前后侧表面固定连接有插入块(19),所述固定盒(5)底部表面开设有与所述插入块(19)结构尺寸相匹配的凹槽。
5.根据权利要求1所述的一种建筑砌墙机器人,其特征在于,所述爪板(10)靠近所述限位盒(6)一侧表面开设有限位孔(20),所述限位孔(20)与所述限位柱(9)结构尺寸相匹配。
6.根据权利要求1所述的一种建筑砌墙机器人,其特征在于,所述爪板(10)数量为两个,两个所述爪板(10)相对侧表面固定连接有防滑软质层。
技术总结
本技术涉及建筑砌墙机器人设备技术领域,本技术提供了一种建筑砌墙机器人,包括机体以及机体上方设有的转动臂,所述转动臂底部固定连接有电动推杆,所述电动推杆套筒端底部与所述电动推杆伸缩端底部均固定连接有连接柱,所述连接柱底部表面固定连接有固定盒,两个所述固定盒背对侧表面均固定连接有限位盒,所述限位盒内腔设有移动板,所述移动板远离于所述固定盒一侧表面固定连接有限位弹簧,所述移动板远离于所述固定盒一侧表面贯穿固定连接有限位柱。通过设有限位盒、移动板、限位弹簧、限位柱、爪板一侧设有限位孔以及在爪板前后侧表面固定连接有插入块,可以更便捷的对爪板进行拆卸替换,便于操作。
技术研发人员:卢亮,周桂雪,胡洁
受保护的技术使用者:青岛新华友建工集团股份有限公司
技术研发日:20230215
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!