一种混凝土机器人协同施工方法与流程
本发明涉及混凝土浇筑,更具体的说,本发明涉及一种混凝土机器人协同施工方法。
背景技术:
1、随着科技的日新月异,我国的工业自动化水平不断提高,尤其是人工智能领域的发展极大地推动了机器人技术的进步,已经开始在诸如建筑等领域替代传统的人工作业。采用机器人来代替人力进行建筑施工,已经逐渐成为我国建筑业转型升级的重要策略。混凝土施工可谓是建筑行业的基石之一,其工艺流程对整个建筑工程的质量和效率有着至关重要的影响。随着混凝土施工技术的自动化和智能化进程,为每个具体工序设计和使用特定功能的建筑机器人已经成为可能。如今,我们已经能够看到那些专门负责混凝土浇筑、振捣、整平和抹光等工序的建筑机器人,例如智能布料机、整平机器人和抹光机器人等,它们都在自己的领域内展现出了强大的工作能力。
2、对于超高层建筑来说,由于施工难度更大,且安全问题更为突出,如何提高混凝土浇筑过程的安全性和质量,成为了工程业界的一个重要课题。因此,工程界研发出了一种新的施工技术——整体提升钢平台技术,也就是我们常说的"造楼机"。这种平台可以集成多种附加功能,比如喷淋、照明等,它能够为施工现场提供一个类似工厂环境的作业条件。这在提升工作效率、保证安全性以及提升工作环境质量等方面,都有着重要的意义。在现代住房建设领域中,采用"造楼机+建筑机器人"这样的施工技术,已经成为一个重要的发展趋势。其优点在于可以极大地提升施工效率,提高施工质量,且整个过程的智能化程度更高,能够带来更好的施工效果。在这种技术中,那些安装在造楼机钢平台上方的智能布料机被称为“智能随动布料机”,它们能够在智能化地进行布料工作的同时,避免了传统布料机需要逐层拆卸和吊装的问题。此外,它们还具有智能出料和智能遥控等功能,极大程度上简化了布料工作,并在一些房屋建设项目中得到了成功的应用。当前,混凝土类机器人在我国尚处于发展初期,应用规模较小,技术方面主要受到以下三点因素的制约:第一:功能单一,目前大部分混凝土类机器人只具备单一功能,机器人之间缺乏联动,效率优势并未完全发挥。第二:人机协作模式不成熟,混凝土浇筑过程中环境时刻处于复杂变化过程,仍需混凝土班组进行协作,但人机如何协作,人机工作界面如何划分,尚未形成成熟的协作模式。第三:成本较高,相较于传统班组,机器人施工前期投入较高,为满足机器人施工作业条件,施工前期需做大量的前置条件优化和充分的施工组织策划。
3、为突破影响混凝土类机器人大规模应用的上述三点技术制约,工程界提出了多种技术方案。如段瀚等(申请公布号:cn116822826 a)提出了一种多机协同的施工路径规划方法,通过对机器人的最优施工效率方案、机器人的施工数量方案进行规划,进而降低施工成本;佟圣皓等(申请公布号:cn116430871 a)提出了一种多场景建筑机器人协同施工规划控制方法,通过中央服务器对各类机器人进行工作区域划分和指令下发,保证了施工进程的连续性和可靠性。综上所述,上述技术方案主要关注机器人之间的多机协同问题,提高了机器人综合作业效率,但鉴于混凝土浇筑过程的复杂性,目前技术条件下完全摆脱人工采用全机器人进行作业应用难度较大,人机协作是更加切实可行的技术方案。
技术实现思路
1、为了克服现有技术的不足,一种混凝土机器人协同施工方法,该施工方法使得多款混凝土类机器人协同应用,保证了施工过程的连续性,提升了机器人整体作业效能。
2、本发明解决其技术问题所采用的技术方案是:一种混凝土机器人协同施工方法,其改进之处在于,该施工方法包括以下步骤:
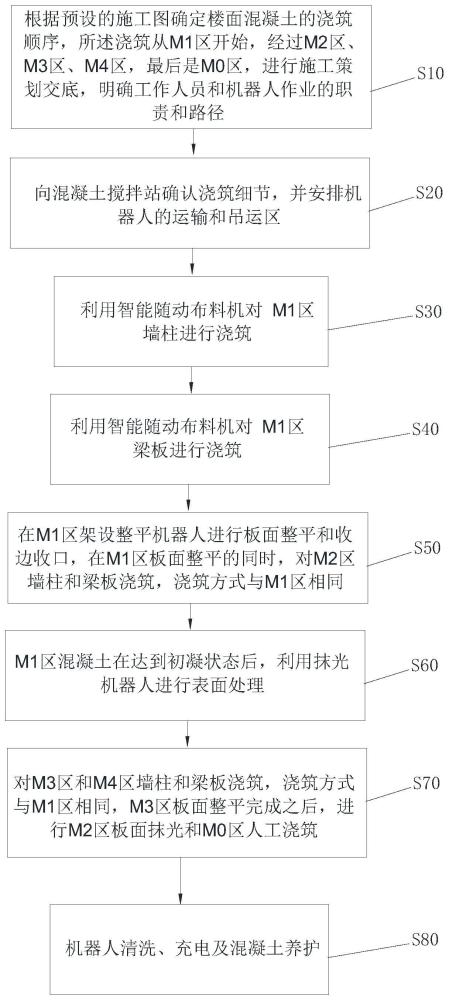
3、s10:根据预设的施工图确定楼面混凝土的浇筑顺序,需浇筑的区域分为mo区、m1区、m2区、m3区以及m4区,其中m0区位于中心,mo区、m1区、m2区、m3区以及m4区按顺序围绕在mo区四周;浇筑从m1区开始,依次经过m2区、m3区、m4区、m0区,进行施工策划交底,明确工作人员和机器人作业的职责和路径;
4、s20:向混凝土搅拌站确认浇筑细节,并安排机器人的运输和吊运;
5、s30:利用智能随动布料机对m1区墙柱进行浇筑;
6、s40:利用智能随动布料机对m1区梁板进行浇筑;
7、s50:在m1区架设整平机器人进行板面整平和收边收口,在m1区板面整平的同时,对m2区墙柱和梁板浇筑,浇筑方式与m1区相同;
8、s60:m1区混凝土在达到初凝状态后,利用抹光机器人进行表面处理;
9、s70:对m3区和m4区墙柱和梁板浇筑,浇筑方式与m1区相同,m3区板面整平完成之后,进行m2区板面抹光和m0区人工浇筑。
10、进一步的,所述步骤s10具体步骤为:
11、s101:工程师在开始混凝土施工进行详细的施工策划,明确每个区域的混凝土浇筑顺序,顺序是施工图按照顺时针方向进行的,即从m1区开始,依次至m2区、m3区、m4区,最后是公共区域m0区,所述m0区为公共区域,包括电梯间和楼梯间;
12、s102:确定具体的施工过程、机器人作业路径以及安全事项,并组织机器人作业班组和混凝土班组进行详细交底,确保各人员正确理解和执行施工计划;
13、s103:对机器人进行检查,确保其性能状态良好,能满足工程施工需求。
14、进一步的,所述步骤s20具体步骤为:
15、s201:与混凝土搅拌站进行沟通,确定混凝土的浇筑时间、混凝土强度标号及用量;
16、s202:根据楼层面积和层数等因素计算混凝土需求量,再根据项目的特点决定不同楼层的混凝土强度标号;
17、s203:确定智能随动布料机在平台上的具体位置后规划进场路线,联系塔吊司机提前做好吊运运输的整平机器人和抹光机器人的安排。
18、进一步的,所述步骤s30具体步骤为:
19、s301:浇筑前润管,使用智能随动布料机进行混凝土布料施工前,泵送9-15分钟清水,再泵送1-3m3的润管砂浆;
20、s302:施工人员遥控智能随动布料机进行混凝土出料和转向;
21、s303:混凝土班组施工人员进行扶管和采用振捣棒进行分层浇筑;
22、s304:完成某块墙柱的混凝土浇筑后,扶管工人通知智能随动布料机的操作人员停止布料,将布料机移到下一个待浇筑的墙柱区域。
23、进一步的,所述步骤s40具体步骤为:
24、s401:根据施工计划,确定梁板的浇筑顺序,同时检查智能随动布料机的工作状态,确认混凝土的质量和数量是否满足需求;
25、s402:混凝土班组和智能随动布料机配合,按照施工计划进行作业,混凝土班组负责搅拌混凝土并将混凝土输送至布料机,智能随动布料机再将混凝土平均布料到需要浇筑的地方;
26、s403:按照既定顺序进行梁板浇筑,期间应随时观察混凝土是否平均分布在梁板上,如有需要进行微调;
27、s404:浇筑完成后需要进行试样的检验,以确认梁板的施工质量,并清理现场和清洗设备,以便进行下一步作业。
28、进一步的,所述步骤s50具体步骤为:
29、s501:混凝土达到一定强度后,在楼梯口、阳台和卫生间其中之一的位置,架设三脚架保持水平,并在三角架上架设激光发射器,打开防震功能,确保周边无遮挡物;
30、s502:将手持接收器对准指定的标高基准线并固定,同时调节激光发射器的高度,直到手持接收器处激光接收器读数为零;
31、s503:在m1区施工人员和智能随动布料机完成位置转移后,由专人操作整平机器人,进行板面整平作业,并由工人协助机器人进行多刮少补;
32、s504:施工人员使用小拖板对整平机器人无法触及的墙边柱脚周围进行人工收边收口;
33、s505:m1区域人工作业任务完成,智能随动布料机旋转至m2区域,旋转过程中为防止混凝土乱溅污染板面,用尼龙袋密封出料口,并用绳子扎紧。
34、进一步的,所述步骤s60具体步骤为:
35、s601:在完成m2区混凝土整平后,需等待约3-4小时,让m1区的混凝土达到初凝状态,此时,作业人员踩在混凝土表面会感到有泥浆浮起,却不会陷入混凝土中;
36、s602:混凝土达到初凝状态后,立即启动抹光机器人进行一次抹盘提浆工序,通过打磨提浆来防止混凝土的硬化和裂纹的产生;
37、s603:在完成提浆工序后的30-40分钟内施工人员通过抹刀进行压实,提高混凝土表面的密实度。
38、进一步的,所述步骤s70后还包括s80,所述步骤s80具体步骤为:
39、s801:当m4区的混凝土整平和抹光结束后,关闭机器人电源,对机器人进行清洗,除去机器人上残留的混凝土,避免混凝土凝固后影响机器的性能;
40、s802:完成清洗后,使用塔吊将机器人转移到造楼机的钢平台上进行充电,并在机器人表面覆盖防水布;
41、s803:当本层的后续工序完成后,机器人会随造楼机爬升到上一层,这可以减少反复的吊运;
42、s804:在已浇筑的混凝土进入终凝后的12小时内,对混凝土进行浇水,让混凝土更好地进行水化反应,以达到更高的强度和持久性;
43、s805:对水平构件进行覆盖塑料薄膜的方式养护,先覆盖塑料薄膜,在薄膜上进行多次浇水;
44、s806:对竖直构件进行洒水养护,直接将水洒在混凝土构件表面,保持其湿润。
45、进一步的,所述步骤s40中,在使用智能随动布料机和混凝土班组在m1区进行梁板浇筑过程中,振捣棒快速插入混凝土,慢速提出,并在振捣过程中使振捣棒上下略有抽动,振捣时间一般在20-30秒,直到混凝土表面平整,不再明显下沉,不出现气泡,表面呈现出灰浆为止。
46、进一步的,所述步骤s502中,调标高时,注意手持标定杆底部是否有混凝土渣块,明确施工完成面为基准标高线的上端口还是下端口或中间,确定激光架设点后,测量附近多处标高基准线高度,进行标高基准点复核,若板面存在多个标高基准点,则取平均值,检查并清除手持标定杆底部的混凝土渣块,明确施工完成面与基准标高线的相对位置。
47、本发明的有益效果是:该施工方法使得多款混凝土类机器人协同应用,保证了施工过程的连续性,提升了机器人整体作业效能。
- 还没有人留言评论。精彩留言会获得点赞!