一种楼宇拆除机械的升降系统及其使用方法与流程
本发明涉及建筑施工领域,特别涉及一种楼宇拆除机械的升降系统及其使用方法。
背景技术:
1、绿色更新改造是城市建筑更新发展的主旋律,在城市密集区内进行高层建筑更新改造,对其绿色施工要求更高,传统的爆破拆除等粗放型施工方式不再适用。
2、对此,现有技术中采用了升降爬架与人工利用工具进行逐层拆解的方式,并且拆除的废料配合于塔吊或者卷扬器在楼层外进行送出。但是目前的建造或拆除楼宇机械设备,其动力系统为专用爬升或下降设计,且结构复杂,通用性差,有待改进。
技术实现思路
1、针对现有技术存在的不足,本发明的目的是提供一种楼宇拆除机械的升降系统,具有结构简单和通用性好的效果。
2、本发明的上述技术目的是通过以下技术方案得以实现的:一种楼宇拆除机械的升降系统,包括:
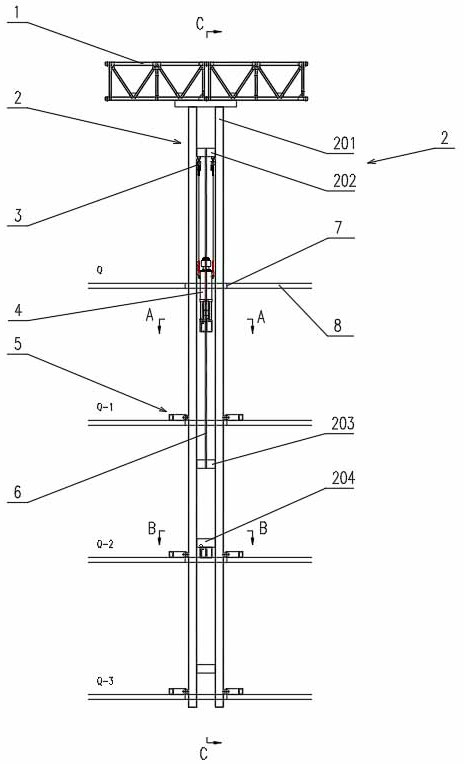
3、顶部桁架系统,位于楼宇待建的楼板或者顶部的楼板的上方;
4、立柱组合,固定于所述顶部桁架系统下方,且竖直穿设所述楼板上的作业洞口;
5、顶升千斤顶,设置于所述立柱组合内部,且用于控制所述立柱组合和所述顶部桁架系统同步升降;
6、导向轮组,设置于每层所述楼板上,且用于抵触所述立柱组合的四周;
7、钢绞线,竖直设置于所述立柱组合内,且穿过所述顶升千斤顶的内部,并供所述顶升千斤顶的两端夹紧固定;
8、上承载横梁,固定于所述顶升千斤顶下方,所述上承载横梁上水平设置有上横梁套管,其上下两板上均开有供所述钢绞线自由通过的开孔,所述上横梁套管的两端均水平滑动连接有伸缩臂;
9、下承载横梁,固定于所述立柱组合下方,所述下承载横梁上水平设置有下横梁套管,所述下横梁套管的两端均水平滑动连接有伸缩臂。
10、本发明在一较佳示例中可以进一步配置为:所述立柱组合包括左右立柱、上固定连梁、下固定连梁以及承载连梁,所述左右立柱竖直且并排布设,所述上固定连梁和所述下固定连梁上下分布于所述左右立柱之间,且供所述钢绞线的两端固定,所述承载连梁设置于所述下固定连梁的下方,且供所述下承载横梁安装固定。
11、本发明在一较佳示例中可以进一步配置为:所述立柱组合内设置有电动葫芦,所述电动葫芦位于所述顶升千斤顶上方,所述电动葫芦的吊钩可抵达所述顶升千斤顶上端侧壁进行吊装。
12、本发明在一较佳示例中可以进一步配置为:所述导向轮组包括安装架和滚轮,所述安装架用于固定于所述楼板上,所述滚轮转动连接于所述安装架的前端,且用于抵触所述立柱组合的外侧壁。
13、本发明在一较佳示例中可以进一步配置为:所述安装架包括底座、滑座、悬架、螺杆和手柄,所述底座用于固定于所述楼板上,所述滑座水平滑动连接于所述底座,所述悬架设置于所述滑座上,且供所述滚轮安装固定,所述螺杆水平螺纹连接于所述底座后方,且转动连接于所述滑座尾端,所述手柄设置于所述螺杆的尾端。
14、本发明在一较佳示例中可以进一步配置为:所述悬架转动连接于所述滑座,所述滑座上设置有圆弧形的导向杆,所述悬架的尾端设置有滑动连接于所述导向杆的导向管,所述导向管上竖直螺纹连接有压紧所述导向杆上端面的螺钉。
15、本发明的另一目的是提供一种楼宇拆除机械的升降系统的使用方法,具有操作方便和提高施工效率的效果。
16、本发明的上述技术目的是通过以下技术方案得以实现的:一种楼宇拆除机械的升降系统的使用方法,包括如下步骤:
17、s1,n层为待建层,初始安装:上承载横梁在n-1层,下承载横梁在n-2层;
18、s2,n层建造完毕,松开顶升千斤顶的所有锁紧,此时下承载横梁承担所有载荷,利用安装在上固定连梁上的电动葫芦将顶升千斤顶提升一小段离开n-1层,将上承载横梁两端的伸缩臂收回在上横梁套管内;
19、s3,再次利用安装在上固定连梁上的电动葫芦将顶升千斤顶及上承载横梁提升,直至上承载横梁穿过作业洞口,到达n层上表面一小段距离;
20、s4,将上承载横梁两端的伸缩臂从上横梁套管伸出,操作顶升千斤顶沿着钢绞线下降(即顶升动作),直至上承载横梁抵达n层上表面,此时上承载横梁承担所有载荷,接着操作顶升千斤顶进行顶升运动,使得钢绞线通过下固定连梁带动立柱组合整体和下承载横梁离开n-2层上表面一小段距离,将下承载横梁两端的伸缩臂收回在下横梁套管内;
21、s5,接着操作顶升千斤顶进行顶升运动,直至下承载横梁穿过n-1层作业洞口,到达n-1层上表面一小段距离,此时立柱组合整体及顶部桁架系统也被提升了约一层的距离;
22、s6,将下承载横梁两端的伸缩臂从上横梁套管伸出,操作顶升千斤顶进行下降动作(即顶升动作的逆操作),直至下承载横梁抵达n-1层上表面时候停止,此时上承载横梁、下承载横梁共同承担载荷,等待n+1施工完毕,如此重复,逐层上升,直至整体施工完毕。
23、本发明在一较佳示例中可以进一步配置为:还包括如下步骤:
24、s7,p层为待拆层,初始安装:上承载横梁在p层,下承载横梁在p-2层;
25、s8,松开顶升千斤顶的所有锁紧,此时下承载横梁承担所有载荷,利用安装在上固定连梁上的电动葫芦将顶升千斤顶提升一小段离开p层,此时可以拆除p层;
26、s9,再次利用安装在上固定连梁上的电动葫芦将顶升千斤顶及上承载横梁下降,直至上承载横梁抵达p-1层楼板上表面,接着操作顶升千斤顶进行顶升运动,使得钢绞线通过下固定连梁带动立柱组合整体和下承载横梁离开p-2层上表面一小段距离,将下承载横梁两端的伸缩臂收回在下横梁套管内,此时上承载横梁9承担所有载荷;
27、s10,操作顶升千斤顶进行下降动作(即顶升动作的逆操作),直至下承载横梁穿过p-2层作业洞口,到达p-3层上表面一小段距离,此时立柱组合整体及顶部桁架系统也下降了约一层的距离;
28、s11,将下承载横梁两端的伸缩臂从上横梁套管伸出,操作顶升千斤顶进行下降动作(即顶升动作的逆操作),直至下承载横梁抵达p-3层上表面时候停止,此时上承载横梁、下承载横梁共同承担载荷,如此重复,逐层下降,直至整体施工完毕。
29、综上所述,本发明具有以下有益效果:
30、1.通过设置既可以上升(建造楼宇),又可以下降(拆除楼宇)的升降动力系统,使得整个系统的通用性好,方便应用于不同的使用需求和工作场景,同时整个系统结构简单,工作稳定,便于应用于楼宇建造和拆除机械设备上;
31、2.通过采用操控便捷的升降动力系统,使得整个系统上升(建造楼宇)和下降(拆除楼宇)的过程更加顺畅和快速;从而达到了操作方便和提高施工效率的效果。
技术特征:
1.一种楼宇拆除机械的升降系统,其特征在于:包括:
2.根据权利要求1所述的一种楼宇拆除机械的升降系统,其特征在于:所述立柱组合(2)包括左右立柱(201)、上固定连梁(202)、下固定连梁(203)以及承载连梁(204),所述左右立柱(201)竖直且并排布设,所述上固定连梁(202)和所述下固定连梁(203)上下分布于所述左右立柱(201)之间,且供所述钢绞线(6)的两端固定,所述承载连梁(204)设置于所述下固定连梁(203)的下方,且供所述下承载横梁(10)安装固定。
3.根据权利要求1所述的一种楼宇拆除机械的升降系统,其特征在于:所述立柱组合(2)内设置有电动葫芦(3),所述电动葫芦(3)位于所述顶升千斤顶(4)上方,所述电动葫芦(3)的吊钩可抵达所述顶升千斤顶(4)上端侧壁进行吊装。
4.根据权利要求1所述的一种楼宇拆除机械的升降系统,其特征在于:所述导向轮组(5)包括安装架(501)和滚轮(502),所述安装架(501)用于固定于所述楼板(8)上,所述滚轮(502)转动连接于所述安装架(501)的前端,且用于抵触所述立柱组合(2)的外侧壁。
5.根据权利要求4所述的一种楼宇拆除机械的升降系统,其特征在于:所述安装架(501)包括底座(51)、滑座(52)、悬架(53)、螺杆(54)和手柄(55),所述底座(51)用于固定于所述楼板(8)上,所述滑座(52)水平滑动连接于所述底座(51),所述悬架(53)设置于所述滑座(52)上,且供所述滚轮(502)安装固定,所述螺杆(54)水平螺纹连接于所述底座(51)后方,且转动连接于所述滑座(52)尾端,所述手柄(55)设置于所述螺杆(54)的尾端。
6.根据权利要求5所述的一种楼宇拆除机械的升降系统,其特征在于:所述悬架(53)转动连接于所述滑座(52),所述滑座(52)上设置有圆弧形的导向杆(56),所述悬架(53)的尾端设置有滑动连接于所述导向杆(56)的导向管(57),所述导向管(57)上竖直螺纹连接有压紧所述导向杆(56)上端面的螺钉(58)。
7.一种楼宇拆除机械的升降系统的使用方法,其特征在于:包括如下步骤:
8.根据权利要求7所述的一种楼宇拆除机械的升降系统的使用方法,其特征在于:还包括如下步骤:
技术总结
本发明公开了一种楼宇拆除机械的升降系统及其使用方法,包括顶部桁架系统、立柱组合、顶升千斤顶、导向轮组、钢绞线、上承载横梁以及下承载横梁,顶升千斤顶用于控制立柱组合和顶部桁架系统同步升降,上承载横梁固定于顶升千斤顶下方,上承载横梁上水平设置有上横梁套管,下承载横梁固定于立柱组合下方,下承载横梁上水平设置有下横梁套管,上横梁套管和下横梁套管的内部均设置有可以从两端滑出的一对伸缩臂。本发明通过设置既可以上升(建造楼宇),又可以下降(拆除楼宇)的升降动力系统,使得整个系统的通用性好,方便应用于不同的使用需求和工作场景,同时整个系统结构简单,工作稳定,便于应用于楼宇建造和拆除机械设备上。
技术研发人员:任海波,谢京刚,吕利霞,庞天舒,宋淑仙,李珊珊,张惠茹,李海生,刘福生,李桐
受保护的技术使用者:北京市建筑工程研究院有限责任公司
技术研发日:
技术公布日:2024/5/12
- 还没有人留言评论。精彩留言会获得点赞!