一种智能鞋柜的制作方法
1.本发明涉及智能家居技术领域,特别涉及一种智能鞋柜。
背景技术:
2.目前,市面上的鞋柜在需要取鞋和放鞋时,仍然需要手动操作。存鞋时,用户需要先脱下鞋子,再手动将鞋子放入鞋柜中;取鞋时,同样需要手动从鞋柜中取鞋。鞋柜没有自动出鞋、自动收纳以及内部自动传输的功能,这对于行动不便的残疾人或者老年人来说,将非常不便。同时,传统鞋柜无法实现清洁保养、存放、运输和取出鞋子的集成化功能,这样会导致用户的体验感较差。
3.因此,如何避免传统鞋柜无法集成清洁保养、存放、运输和取出鞋子的功能,是本领域技术人员目前需要解决的技术问题。
技术实现要素:
4.本发明的目的是提供一种智能鞋柜,可以实现鞋子的清洁保养、分区存储、运输和取出功能,同时,可以简化用户在存取鞋子过程中的操作过程,从而增强用户的使用体验。
5.为实现上述目的,本发明提供一种智能鞋柜,包括柜体以及活动连接于所述柜体、用以相对于所述柜体沿水平方向伸缩运动的输出模块,所述柜体内设有清洁模块、存放模块和升降传输模块,所述清洁模块用以供待清洁鞋清洁和保养,所述存放模块用以存放清洁后的鞋子,所述输出模块、所述清洁模块和所述存放模块均可沿横向传送鞋子,所述升降传输模块可沿竖向运动、且供鞋子在所述清洁模块、所述存放模块和所述输出模块之间传送。
6.可选地,所述清洁模块包括清洁仓,所述清洁仓内设有清洁执行组件以及活动连接于所述清洁仓、用以放置待清洁鞋的操作台,通过所述操作台将待清洁鞋运送到预设清洁位,以供所述清洁执行组件对位于所述预设清洁位上的待清洁鞋清洁。
7.可选地,所述操作台包括用以供待清洁鞋沿横向移动的横向传送机构以及位于所述横向传送机构的下方、用以带动待清洁鞋沿纵向移动的纵向滑移机构;
8.所述横向传送机构和所述纵向滑移机构之间设有:
9.与所述横向传送机构连接、用以带动所述横向传送机构升降的升降机构;
10.与所述升降机构连接、用以带动所述升降机构旋转的旋转机构;
11.与所述旋转机构连接、用以带动所述旋转机构沿横向移动的横向滑移机构。
12.可选地,所述清洁执行组件包括机械手总成以及设于所述机械手总成上、用以供待清洁鞋除尘、上油的清洁头。
13.可选地,所述存放模块包括多组存鞋单元,所述升降传输模块的个数与所述存鞋单元的组数相等,任一组所述存鞋单元包括两个相对所述升降传输模块对称设置的所述存鞋单元,任一组所述存鞋单元设有用以容置一个所述升降传输模块的升降空间;
14.任一所述存鞋单元设有多个沿竖向间隔设置的存鞋区域,任一所述存鞋区域包括
两个并排设置、用以存放一双鞋子的存鞋位。
15.可选地,所述升降传输模块包括两个升降传输装置,任一所述升降传输装置包括链传动机构以及与所述链传动机构连接、用以承载并传送鞋子的升降平台,任一所述升降平台设有第一平台和位于所述第一平台下方的第二平台。
16.可选地,还包括设于所述存放模块的上方、用以对鞋子进行消毒和除臭的消毒模块,所述消毒模块包括消毒仓,所述消毒仓内设有消毒平台以及设于所述消毒平台上方的紫外线消毒灯、臭氧模块和烘干模块。
17.可选地,所述输出模块包括滑轨机构以及与所述滑轨机构滑动连接的流水线总成,所述流水线总成包括双层流水线机构以及用以供置鞋板在所述双层流水线机构中传输的升降流水线机构。
18.可选地,还包括信息采集模块和控制系统,通过所述信息采集模块采集鞋子的信息并传递至所述控制系统,以供所述控制系统根据采集到的信息控制所述清洁模块、所述升降传输模块、所述存放模块和所述输出模块运动。
19.可选地,所述柜体还设有通风系统,所述通风系统包括设有:
20.进风装置的进风口;
21.扩散风道;
22.集风风道;
23.设有排风装置的排风口;
24.所述进风装置向所述进风口内吸入空气,所述扩散风道将进入所述柜体内的空气导入所述存放模块,通过所述集风风道将所述存放模块中的空气导向所述排风口,以供所述排风装置将空气排出所述柜体。
25.相对于上述背景技术,本发明实施例所提供的智能鞋柜,包括柜体、清洁模块、存放模块、升降传输模块和输出模块。其中,输出模块活动连接于柜体,以实现相对于柜体沿水平方向伸缩运动;清洁模块、存放模块和升降传输模块均设置于柜体内,清洁模块用于供待清洁鞋清洁和保养,存放模块用于存放清洁后的鞋子,且输出模块、清洁模块和存放模块均可沿横向传送鞋子;升降传输模块可沿竖向运动、且供鞋子在清洁模块、存放模块和输出模块之间传送。显然地,用户脱下的鞋子即可通过输出模块沿水平方向的伸缩运动输送至柜体内,并由升降传输模块将鞋子传送至清洁模块,清洁模块可对鞋子进行清洁和保养,完成清洁的鞋子再由升降传输模块传送至存放模块中存储;当用户需要穿鞋时,存放模块可将对应的鞋子传送至升降传输模块上,并由升降传输模块传送至输出模块,从鞋柜底部输出,以供用户穿鞋。如此设置的智能鞋柜,其有益效果主要包括:上述智能鞋柜可以集成鞋子的清洁、分区存放、运输和输出功能,从而增加用户的体验感;同时,相比于现有技术中手动存鞋、取鞋以及用脚挤压鞋油开关实现上油的操作,上述设置方式可以简化用户清洁、存鞋和取鞋的操作流程,不仅可以提高清洁效果,还可以避免由于弯腰等动作而导致行动不便的残疾人或老年人受伤的风险。
附图说明
26.为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍。显而易见地,下面描述中的附图仅仅是本
发明的实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据提供的附图获得其他的附图。
27.图1为本发明实施例所提供的智能鞋柜的第一实施方案的结构示意图;
28.图2为图1中输出模块处于收缩状态的结构示意图;
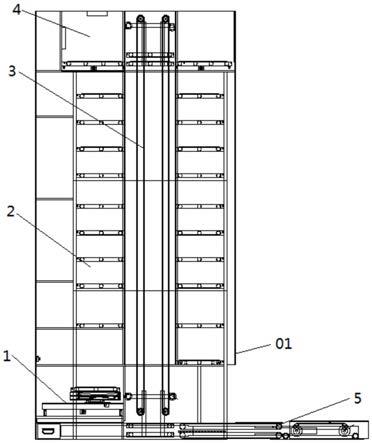
29.图3为图1中存放模块存满鞋子的结构示意图;
30.图4为图2中柜体的通风示意图;
31.图5为本发明实施例所提供的智能鞋柜的第二实施方案的结构示意图;
32.图6为图5中输出模块处于收缩状态的结构示意图;
33.图7为图5中存放模块存满鞋子的结构示意图;
34.图8为图6中柜体的通风示意图;
35.图9为本发明实施例所提供的智能鞋柜的第三实施方案的结构示意图;
36.图10为本发明实施例所提供的智能鞋柜的第一种清洁模块的结构示意图;
37.图11为本发明实施例所提供的智能鞋柜的第二种清洁模块的结构示意图;
38.图12为本发明实施例所提供的智能鞋柜的第三种清洁模块的结构示意图;
39.图13为本发明实施例所提供的智能鞋柜的存放模块的主视图;
40.图14为本发明实施例所提供的智能鞋柜的存放模块的俯视图;
41.图15为本发明实施例所提供的智能鞋柜的第一种升降传输模块的主视图;
42.图16为本发明实施例所提供的智能鞋柜的第一种升降传输模块的侧视图;
43.图17为本发明实施例所提供的智能鞋柜的第二种升降传输模块的主视图;
44.图18为本发明实施例所提供的智能鞋柜的第二种升降传输模块的侧视图;
45.图19为本发明实施例所提供的智能鞋柜的第二种升降传输模块的俯视图;
46.图20为本发明实施例所提供的智能鞋柜的第二种升降传输模块升降循环示意图;
47.图21为本发明实施例所提供的智能鞋柜的第一种消毒模块的主视图;
48.图22为本发明实施例所提供的智能鞋柜的第一种消毒模块的俯视图;
49.图23为本发明实施例所提供的智能鞋柜的第二种消毒模块的主视图;
50.图24为本发明实施例所提供的智能鞋柜的第二种消毒模块的俯视图;
51.图25为本发明实施例所提供的智能鞋柜的第二种消毒模块中置鞋板脱离滚筒的主视图;
52.图26为本发明实施例所提供的智能鞋柜的输出模块伸出状态示意图;
53.图27为本发明实施例所提供的智能鞋柜的输出模块缩回状态示意图。
54.其中:
55.01
‑
柜体、
[0056]1‑
清洁模块、10
‑
清洁仓、11
‑
操作台、12
‑
清洁执行组件、13
‑
垃圾收集抽屉、14
‑
电动门;
[0057]
111
‑
横向传送机构、112
‑
升降机构、113
‑
旋转机构、114
‑
横向滑移机构、115
‑
纵向滑移机构、1111
‑
清洁滚筒、1112
‑
清洁滚筒电机、1113
‑
纵向传送机构;
[0058]
121
‑
清洁头、122
‑
机械手总成、1221
‑
第一机械手、1222
‑
第一底座、1223
‑
滑动机构、12211
‑
第二机械手、12212
‑
第二底座;
[0059]2‑
存放模块、20
‑
升降空间、21
‑
存鞋单元、211
‑
存鞋区域、2111
‑
左前鞋位、2112
‑
右
前鞋位、2113
‑
左后鞋位、2114
‑
右后鞋位、2115
‑
存放主动滚筒、2116
‑
存放从动滚筒、2117
‑
存放传送带、2118
‑
存放滚筒电机、212
‑
前端限位传感器、213
‑
后端限位传感器;
[0060]3‑
升降传输模块、30
‑
升降传输装置、301
‑
链传动机构、302
‑
升降平台、3021
‑
第一平台、3022
‑
第二平台、31
‑
第一链条、311
‑
第一安装点、312
‑
第二安装点、32
‑
第二链条、321
‑
第三安装点、322
‑
第四安装点、33
‑
第一链轮、34
‑
第二链轮、35
‑
第三链轮、36
‑
第四链轮;
[0061]4‑
消毒模块、40
‑
消毒仓、41
‑
消毒平台、411
‑
横向传送组件、412
‑
纵向传送组件、4111
‑
消毒滚筒、4112
‑
消毒滚筒电机、4113
‑
纵向滑杆、42
‑
紫外线消毒灯;
[0062]5‑
输出模块、50
‑
滑轨机构、51
‑
流水线总成、511
‑
双层流水线机构、5111
‑
第一层流水线机构、5112
‑
第二层流水线机构、5113
‑
承重支撑板、5114
‑
结构加强方钢、512
‑
升降流水线机构、5121
‑
升降流水线、5122
‑
平衡数字舵机、5123
‑
舵机支架、5124
‑
升降数字舵机;
[0063]6‑
进风口;
[0064]7‑
扩散风道;
[0065]8‑
集风风道;
[0066]9‑
排风口。
具体实施方式
[0067]
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
[0068]
为了使本技术领域的技术人员更好地理解本发明方案,下面结合附图和具体实施方式对本发明作进一步的详细说明。
[0069]
需要说明的是,下文所述的“上端、下端、左侧、右侧”等方位词都是基于说明书附图所定义的。
[0070]
如图1
‑
9所示,本发明实施例所提供的智能鞋柜,包括柜体01、清洁模块1、存放模块2、升降传输模块3、消毒模块4和输出模块5。其中,输出模块5活动连接于柜体01,以实现相对于柜体01沿水平方向的伸缩运动,从而可以实现鞋子的收纳和取出;清洁模块1、存放模块2、升降传输模块3和消毒模块4均设置于柜体01内,清洁模块1用于供待清洁鞋清洁和保养,存放模块2用于存放清洁后的鞋子,消毒模块4用于供鞋子消毒和除臭,且清洁模块1、存放模块2、升降传输模块3、消毒模块4和输出模块5均可沿横向传送鞋子。
[0071]
此外,升降传输模块3可沿竖向运动,且供鞋子在清洁模块1、存放模块2和输出模块5之间传送。也就是说,清洁模块1和升降传输模块3二者可以实现鞋子的相互传送,存放模块2和升降传输模块3二者可以实现鞋子的相互传送,消毒模块4和升降传输模块3二者可以实现鞋子的相互传送,输出模块5和升降传输模块3二者可以实现鞋子的相互传送。
[0072]
显然地,用户脱下的鞋子即可通过输出模块5沿靠近升降传输模块3的方向运动输送至柜体01内。同时,利用输出模块5的横向传送功能,可以将鞋子转送至升降传输模块3上,通过升降传输模块3上升以将鞋子运送到预设高度,并由升降传输模块3将鞋子传送至清洁模块1。清洁模块1可对鞋子进行清洁和保养,完成清洁的鞋子再由升降传输模块3传送至存放模块2中存储。当然,也可以根据消毒需要,通过升降传输模块3将鞋子传送至消毒模
块4,以实现对于鞋子的消毒和除臭操作。当用户需要穿鞋时,存放模块2可将对应的鞋子传送至升降传输模块3上,通过升降传输模块3下降以将鞋子运送到预设位置,并由升降传输模块3传送至输出模块5,输出模块5沿远离升降传输模块3的方向运动,以实现鞋子的输出并供用户穿戴。
[0073]
这样一来,上述智能鞋柜可以集成鞋子的消毒、清洁、分区存放、运输和输出功能,从而增加用户的体验感。同时,相比于现有技术中手动存鞋、取鞋以及用脚挤压鞋油开关实现上油的操作,上述设置方式可以简化用户消毒、清洁、存鞋和取鞋的操作流程,不仅可以提高清洁效果,还可以避免由于弯腰等动作而导致行动不便的残疾人或老年人受伤的风险。
[0074]
在本发明实施例中,输出模块5可活动地连接于柜体01,比如输出模块5可以滑动连接于柜体01,即通过输出模块5相对于柜体01的滑动,以实现输出模块5相对于柜体01并沿水平方向伸缩运动,从而便于鞋子的收纳和输出。同时,上述清洁模块1、存放模块2、升降传输模块3、消毒模块4和输出模块5均具有横向传送的功能,清洁模块1、存放模块2、消毒模块4和输出模块5可以在对应的流程中将鞋子沿横向传送至升降传输模块3。作为优选的,清洁模块1、存放模块2、升降传输模块3、消毒模块4和输出模块5均设有传送带机构,传送带机构可以实现沿横向传送鞋子的功能。
[0075]
需要注意的是,鞋子的传输均是通过置鞋板实现的,一双鞋子对应一个置鞋板,置鞋板用于承载鞋子,比如当鞋子需要从存放模块2转送至升降传输模块3上时,通过传送带机构(或者滚筒传送机构)的运行即可将置鞋板连带鞋子转送至升降传输模块3。
[0076]
为了便于实现智能鞋柜自动化清洁、传输、存储和输出的功能,鞋柜还设有信息采集模块和控制系统,通过信息采集模块采集鞋子的信息并传递至控制系统,以供控制系统根据采集到的信息控制清洁模块1、升降传输模块3、存放模块2和输出模块5运动。当然,根据消毒需要,控制系统也可以控制消毒模块4对鞋子进行消毒处理。
[0077]
相应地,上述控制系统具体可以设置为包括具有预设控制程序的控制主板以及分别设于清洁模块1、存放模块2、升降传输模块3、消毒模块4和输出模块5中的模块驱动板,驱动板的主控部分是微控制器,微控制器可以通过iic\uart\usb等通信接口与控制系统的控制主板直接通信,以获取控制指令,并且微控制器还能够反馈模块内部的相关参数。这样一来,将信息采集模块采集到的鞋子信息传递至控制系统的控制主板,主板识别和计算出相关的具体操作指令参数,并传递至各个模块的模块驱动板,待模块驱动板接收到系统主板发出的控制指令时,模块驱动板能够控制相应的模块执行相应的操作。
[0078]
具体地说,上述信息采集模块采用视觉模块,视觉模块用于获取待清洁鞋的图像信息。同时,视觉模块还能够将待清洁鞋的图像信息传递至控制系统,通过视觉模块将获取到的图像信息传递至控制系统,以供控制系统控制清洁模块1、升降传输模块3、存放模块2和输出模块5运动。当然,视觉模块可以采用相机或摄像头,相机或摄像头可以通过机械手设备装配,以便于对待清洁鞋的信息进行采集。
[0079]
此外,上述控制系统还可以包括用户信息管理模块、鞋子信息管理模块、自动推荐模块、智能服务模块和智能操控模块,其中:
[0080]
用户信息管理模块:通过该模块为每一位使用的用户建立相关的数据库;添加用户时,通过摄像头采集用户人脸信息,还将通过交互触摸屏获取用户的其他个人信息,包括
兴趣爱好、生活习惯以及工作性质等等。
[0081]
鞋子信息管理模块:通过该模块为放置在柜体01内部的每一双鞋子建立相关的数据库;当一双新鞋子加入柜体01内时,该模块会通过交互触摸屏获取用户输入的鞋子相关信息,包括主人身份信息以及主人对该鞋子的特殊喜好或者特殊要求等;同时,通过柜体01内部的摄像头对鞋子进行拍照,并且将相关信息显示在屏幕上,包括鞋子颜色、类型等,由用户确认。每次使用鞋子以后,鞋子信息管理模块都将更新该鞋子的相关数据库,保存新的相关信息,包括使用时长、是否清洁保养等。
[0082]
自动推荐模块:该模块能够通过提前获取用户使用当天的行程、工作性质、兴趣爱好以及当天的穿着等提前为用户推荐好鞋子。
[0083]
智能服务模块:该模块能够通过麦克风以及人脸摄像头为用户提供语音交互和人脸识别等智能服务,通过这些交互手段提升用户的相关使用体验。
[0084]
智能操控模块:用于根据摄像头采集到的鞋子的图像信息控制清洁模块1、存放模块2、升降传输模块3、消毒模块4和输出模块5运动。
[0085]
为了便于实现对于鞋子的智能化操作,控制系统还可以根据实际需要增设其他的功能模块,本文包括但不限于上述用户信息管理模块、鞋子信息管理模块、自动推荐模块、智能服务模块和智能操控模块。
[0086]
下面具体阐述智能鞋柜中各个模块的实施方式。
[0087]
清洁模块1:
[0088]
该清洁模块1包括清洁仓10以及设于清洁仓10内的操作台11和清洁执行组件12,其中,操作台11可活动地设于清洁仓10内,操作台11用于供待清洁鞋放置,操作台11被配置为用于将待清洁鞋运送到预设清洁位,清洁执行组件12被配置为可对位于预设清洁位的待清洁鞋的全表面进行清洁、保养。
[0089]
此外,清洁仓10内还设有垃圾收集抽屉13和电动门14,在清洁过程中掉落的各种垃圾和灰尘会落入垃圾收集抽屉13内,可以定期进行清理。鞋子在清洁处理的过程中将不可避免地产生各种尘埃和垃圾,为了避免这些尘埃和垃圾污染到其他鞋位的鞋子,在入鞋口安装有数字舵机驱动的电动门14,当鞋子进入清洁仓10内部的时候,电动门14就关闭,并且在整个清洁的过程中,电动门14都一直处于关闭状态。
[0090]
为了便于鞋子清洁,上述操作台11为可旋转、升降、水平移动的操作台11,以实现在水平方向以90
°
夹角的方式交叉移动,也可以旋转和升降,以便实现对鞋子的360
°
清洁处理。当然,旋转的功能模块、升降的功能模块以及水平移动的功能模块可以根据实际的清洁需求进行选择安装。
[0091]
用于采集待清洁鞋的图像信息的摄像头可以安装于机械手的前端位置,在获取信息后,智能操控模块能够对摄像头获取的图像信息进行预处理和数据分析,并通过对比该鞋子的完好状态下拍照保留的参考标准,从而判断鞋子的表面污物情况。
[0092]
具体地,参数获取单元获取鞋子拍照后的相关参数以后,通过数据运算单元计算出相关的清洁执行组件12中相应机械手和操作台11的具体操作参数,并且发送给模块驱动板。模块驱动板收到参数命令以后,将操控操作台11把鞋子送到相关的机械手活动区域内,再控制相关的机械手靠近鞋子表面并进行相关的清洁、保养操作。
[0093]
需要说明的是,智能操控模块能够根据运算出的参数调用安装有清洁毛刷的机械
手靠近鞋子表面,并且进行清洁处理。清洁处理执行完毕之后,智能操控模块将会调用安装有摄像头的机械手再次对鞋子表面进行拍照并识别,最后确认了清洁效果达到要求以后,结束对这只鞋子的处理,如果没有达到效果,则再次对鞋子执行清洁操作。
[0094]
综上,当需要清洁鞋子的时候,鞋子先进入清洁仓10内部,然后摄像头对鞋子进行分区拍照(正前方、前上方、左侧、右侧、后方),然后,控制模块根据图像识别的情况调用机械手进行清洁操作。操作完成之后再拍照识别,确定清洁干净以后,将鞋子送入存鞋模块存放位。当然,当鞋子需要上鞋油的时候,先调用摄像头对鞋子进行分区拍照,再调用喷油机械手喷油,然后调用电动毛刷头机械手刷鞋,最后调用电动毛巾机械手清理,处理完了以后放入存鞋模块存放位。
[0095]
当然,根据实际需要,上述操作台11可以活动连接于清洁仓10的底板上,清洁执行组件12则可以连接于清洁仓10的任一侧侧壁上,清洁仓10的大小可以根据实际的清洁需要进行调整。操作台11可以相对清洁仓10的底板进行升降、转动、平移,以将待清洁鞋运送至便于清洁执行组件12清洁的位置,清洁执行组件12可以设置为包括清洁头121和机械手总成122,清洁头121设于机械手总成122的前端位置,用于对待清洁鞋除尘、上油。当然,清洁头121包括但不限于各种除尘的电动毛刷头、电动毛巾斗或者上油毛刷头等。
[0096]
实施例一:
[0097]
如图10所示,在第一种实施例中,该操作台11具体为集升降、旋转、平移功能于一体的操作台11总成,具体包括横向传送机构111、升降机构112、旋转机构113、横向滑移机构114和纵向滑移机构115。其中,横向传送机构111用于供待清洁鞋沿横向移动,纵向滑移机构115用于带动待清洁鞋沿纵向移动,且纵向滑移机构115位于横向传送机构111的下方。横向传送机构111和纵向滑移机构115之间由上至下依次设有升降机构112、旋转机构113和横向滑移机构114。升降机构112与横向传送机构111连接,以带动横向传送机构111升降;旋转机构113与升降机构112连接,以带动升降机构112旋转;横向滑移机构114与旋转机构113连接,以带动旋转机构113沿横向移动。
[0098]
相应的,上述机械手总成122可以设置为包括第一机械手1221、第一底座1222和滑动机构1223,滑动机构1223包括滑轨、轨道安装方钢、横向滑动齿条和横向滑动电机总成,滑动机构1223用于带动第一底座1222沿横向滑动。其中,第一机械手1221安装在第一底座1222上,第一底座1222可以设置为滑块结构,第一底座1222可相对于滑轨滑动。具体地,第一底座1222上安装有横向滑动电机总成,通过横向滑动电机总成驱动横向滑动齿条,以推动第一机械手1221和第一底座1222在滑轨上运行。当然,根据实际需求,滑轨上可以同时安装多个第一底座1222和第一机械手1221,比如擦鞋机械手、喷油机械手等,第一底座1222和第一机械手1221一一对应设置。
[0099]
具体来说,操作台11的横向传送机构111具体为传送带机构或者滚动传送机构,传送带机构包括传送平台,传送平台上设有驱动电机、主动轮、从动轮、传送带,驱动电机驱动主动轮,以带动传送带和从动轮运转。当传送平台与用于传输待清洁鞋的升降平台302齐平时,即可启动驱动电机驱动传送带来传输鞋子。
[0100]
为了防止传输过程中鞋子偏离操作台11,操作台11顶部的前后两端分别设置有两个限位传感器,两个限位传感器之间的距离比用于放置待清洁鞋的置鞋板长度短10mm左右。当两个限位传感器都被触发以后,则表明置鞋板已经完全摆放在了操作台11上,此时,
可以对鞋子进行清洁的操作;当有一个限位传感器被触发的时候则表明置鞋板有一部分在操作台11上,有一部分还没有进入操作台11,此时操作台11不能动;当两个限位传感器都没有被触发的时候,表明置鞋板已经完全离开了操作台11。
[0101]
升降机构112设有升降平台302,升降平台302整体呈“x”型,升降平台302内安装有电动拉杆,电动拉杆的一端固定在升降平台302底部,另一端与升降主动轴相连。传送平台整体安装在升降平台302上,启动电动拉杆,当电动拉杆向左边缩回时,升降平台302就会呈“x”型上升;在升高以后,电动拉杆往右侧伸出时,升降平台302则会下降。
[0102]
进一步的,旋转机构113具体为转台机构,升降平台302及以上机构均整体安装于转台机构上,转台机构包括:安装底板、旋转驱动直流电机、直齿轮、齿圈和转台。安装底板安装于转台的下方,旋转驱动直流电机安装于安装底板的底部,并且通过直齿轮与齿圈咬合在一起,当旋转驱动直流电机工作的时候,会通过齿圈驱动升降机构112以及横向传送机构111一起旋转。
[0103]
更进一步的,横向滑移机构114包括横向滑块和横向丝杆底座总成,横向滑块和横向丝杆底座总成连接于安装底板的底部。由于横向丝杆底座总成与安装底板固定连接,因此,随着横向丝杆底座总成的丝杠旋转,可推动安装底板以上的所有机构横向移动;丝杆的端部还设置有挡片,安装丝杆的底座上设置有光耦,当丝杆转动一圈,上面的挡片就从光耦中间扫过一次,采用这样的方式来记录丝杆的旋转圈数,从而计算整个升降平台302的横向移动距离。
[0104]
纵向滑移机构115的运动原理与横向滑移机构114相同,纵向滑移机构115包括纵向滑块和纵向丝杆底座总成,通过纵向丝杆底座总成的旋转运动以驱动纵向滑块滑动,从而带动横向滑移机构114及以上机构纵向移动,且纵向滑移机构115安装于横向滑移机构114的下方。当然,横向滑移机构114与纵向滑移机构115之间通过支撑方钢总成支撑连接,支撑方钢总成与横向滑移机构114和纵向滑移机构115均滑动连接。
[0105]
实施例二:
[0106]
如图11所示,在第二种实施例中,操作台11采用横向传送机构111和可升降的纵向传送机构1113实现鞋子的输送,与第一种实施例中横向传送机构111不一样的是,本实施例中的横向传送机构111设有多个并排设置的清洁滚筒1111以及与清洁滚筒1111一一对应设置的清洁滚筒电机1112,清洁滚筒电机1112用于带动清洁滚筒1111转动;纵向传送机构1113具体为可升降的纵向传送带机构或滑杆机构,且纵向传送带机构或滑杆机构连接有顶升机构,顶升机构用于顶升纵向传送带机构或滑杆机构以实现将待清洁鞋顶离清洁滚筒1111,待鞋子脱离清洁滚筒1111,鞋子即可在纵向传送带机构或滑杆机构的带动下沿纵向传输至目标位置。
[0107]
这样一来,多个清洁滚筒1111的转动可以实现置鞋板沿横向的传输,当纵向传送带机构或滑杆机构被顶升机构顶升至工作高度以后,置鞋板连同纵向传送带机构或滑杆机构被顶升机构顶升起来,脱离清洁滚筒1111,此时置鞋板即可在纵向传送带机构或滑杆机构的带动下纵向移动。
[0108]
机械手总成122则采用第二机械手12211和第二底座12212装配的结构,第二底座12212可以与清洁仓10的内壁固接,第二机械手12211与第二底座12212二者的连接包括但不限于固接、滑动连接或转动连接等方式;同时,相较于第一机械手1221,第二机械手12211
具有多维度活动能力(比如可以采用工业六轴机械臂),可以将清洁头121传递到鞋子外表面的任意地方,以实现清洁操作。当然,第二机械手12211的数量可以根据需要进行设置,且不同的第二机械手12211上可以设置不同功能的清洁头121。
[0109]
实施例三:
[0110]
如图12所示,在第三种实施例中,清洁仓10内设置有多个通过第二底座12212固定的第二机械手12211,第二机械手12211具有多维度活动能力,第二机械手12211可以采用工业六轴机械臂,可以将清洁头121传递到鞋子外表面的任意地方,以实现清洁操作。
[0111]
操作台11采用横向传送机构111和纵向滑移机构115的组合结构,其中,横向传送机构111具体为传送带机构,传送带机构的结构可以参照第一种实施例中的传送带机构;当然,纵向滑移机构115的设置也可以参照第一种实施例中的纵向滑移机构115。横向传送机构111设于纵向滑移机构115的上方,通过纵向滑移机构115可以实现推动横向传送机构111及上部件沿纵向移动。具体的清洁过程和上油保养过程可以参照第一种实施例,此处将不再一一展开。
[0112]
存放模块2:
[0113]
如图13和14所示,该存放模块2可以设置多组存鞋单元21,升降传输模块3的个数与存鞋单元21的组数相等,且一组存鞋单元21包括两个相对升降传输模块3对称设置的存鞋单元21,两个存鞋单元21之间设有用于供一个升降传输模块3沿竖向升降运动的升降空间20。当然,存放模块2的数量也可以根据需要进行调整,比如可以在柜体01的内部沿竖直方向设置至少两个存放模块2,任意两个相邻存放模块2之间相互对应。
[0114]
本文对于存鞋单元21的组数不作具体限制,其数量可以根据实际的存鞋量进行调整,当存放模块2设置一组存鞋单元21时,两个存鞋单元21分设于柜体01内部的左右两侧位置,两个存鞋单元21之间设有升降空间20,用于容置升降传输模块3;当存鞋单元21的组数多于两组时,从左至右每一组存鞋单元21之间设置一个升降传输模块3。
[0115]
针对每一个存鞋单元21,其设有多个沿竖向间隔设置的存鞋区域211,任意两个相邻存鞋区域211的间隔可以设置为相等,根据两个相邻存鞋区域211的间隔可以选择存放低帮鞋或高帮鞋;任一存鞋区域211包括两个并排设置的存鞋位,任一存鞋位用于存放一双鞋子,即一个存鞋区域211可以并排放置两双鞋子。也就是说,位于同一水平面设有两个相对设置的存鞋区域211,包括左前鞋位2111、右前鞋位2112、左后鞋位2113和右后鞋位2114。
[0116]
为了便于装配,存放模块2还设有位于存鞋单元21外部的框架,框架包括横梁短方钢和横梁长方钢,横梁短方钢和横梁长方钢用于形成矩形状的安装框架。
[0117]
为了便于实现存放模块2的传输功能,任一存鞋位具体为传送带机构,传动带机构包括存放主动滚筒2115、存放从动滚筒2116、存放传送带2117以及用以驱动存放主动滚筒2115的存放滚筒电机2118。当然,也可以采用滚筒传送机构进行传送。存放主动滚筒2115和存放从动滚筒2116连接有第一支架板,用以形成基本框架;存放传送带2117套设于存放主动滚筒2115和存放从动滚筒2116的外部;存放滚筒电机2118的输出轴通过第一直齿轮与存放主动滚筒2115咬合连接在一起,当需要存放鞋子或者需要取出鞋子的时候,由存放滚筒电机2118驱动存放主动滚筒2115传送鞋子。
[0118]
作为优选的,在第一支架板的两端可以分别安装有一组前端限位传感器212和一组后端限位传感器213,一组前端或者后端限位传感器213包括两个相对设置的前端或后端
限位传感器213。两组限位传感器之间的距离比置鞋板的总长度短10mm左右,因此,只有当两组限位传感器都被触发才能判定置鞋板已经完全放好,如果只有两个前端限位传感器212触发,则说明置鞋板有一部分在存鞋位里面,还有一部分没有在存鞋位上,此时,置鞋板没有放好;如果两组传感器都没有被触发,则表明置鞋板已经完全脱离了存鞋位。
[0119]
当然,上述任一存鞋位也可以设置为由多根存放主动滚筒2115并排设置的结构,即通过多根存放主动滚筒2115转动可以实现鞋子的转送。
[0120]
升降传输模块3:
[0121]
实施例一:
[0122]
如图15和16所示,在该实施例中,升降传输模块3包括两个升降传输装置30,两个升降传输装置30分设于升降空间20的内侧和外侧,相互之间不干扰,不交叉。任一升降传输装置30包括链传动机构301以及与链传动机构301连接,以承载并传送鞋子的升降平台302。链传动机构301包括升降主动链轮、升降从动链轮和升降链条。升降主动链轮与升降直流电机连接,通过升降直流电机驱动升降主动链轮,从而带动升降平台302升降;升降平台302通过插销或者其他连接件与链条连接,并能够随着链条运转实现在升降空间20内的升降。
[0123]
进一步的,任一升降平台302设有第一平台3021和位于第一平台3021下方的第二平台3022,也就是说,升降平台302设有上下两层平台,且任一平台均为传动带机构或滚筒传送机构。
[0124]
需要注意的是,第一平台3021用于放置有鞋子的置鞋板,第二平台3022用于放置空的置鞋板;同时,第一平台3021和第二平台3022均设有位置传感器,用于检测对应平台是否与存放模块2的存鞋位或者输出模块5的第一层流水线机构5111、第二层流水线机构5112齐平,以保证鞋子可以有效、平稳地传送。
[0125]
此外,第一平台3021的两端和第二平台3022的两端分别安装有左端限位传感器和右端限位传感器。任一平台的左右两个限位传感器之间的距离比置鞋板的长度略短,当两个限位传感器都被触发时,即可判定置鞋板已经完全放好,当两个限位传感器均未被触发时,即可判定置鞋板已经完全离开升降平台302。
[0126]
实施例二:
[0127]
如图17
‑
20所示,作为另一具体实施例,与实施例一中的两个相互独立的升降传输装置30不同,本实施例中的升降传输模块3具体为循环升降机构。升降传输模块3包括第一链条31、第二链条32以及多个升降平台302,第一链条31和第二链条32均呈环状分布。第一链条31与全部升降平台302的第一侧连接,第二链条32与全部升降平台302的第二侧连接。所谓升降平台302的第一侧即为升降平台302的左侧,升降平台302的第二侧即为升降平台302的右侧。
[0128]
这样一来,第一链条31和第二链条32即可形成,循环升降机构的侧视图如图18所示,其中,左边的竖直空间为内侧升降空间20,右边的竖直空间为外侧升降空间20。第一链条31通过第一链轮33和第二链轮34跨接于内外侧的升降空间20,第二链条32通过第三链轮35和第四链轮36跨接于内外侧的升降空间20,且任一升降平台302在框架顶端的两个对角位置上各设置一个链条安装点,一个与第一链条31连接,另一个与第二链条32连接。这样一来,升降平台302在经过升降传输模块3的顶部,或者底部的时候,可以跟随链条沿横向移动,从而进入另外一侧的升降空间20,以此形成往复循环。
[0129]
循环升降机构的俯视图如图19所示,第一链条31通过第一安装点311和第二安装点312(左侧两个链轮的安装位置和左侧两个链条安装点的位置重合)与升降平台302的左侧安装在一起;第二链条32通过第三安装点321和第四安装点322(右侧两个链轮与右侧两个链条安装点同样重合)与升降平台302的右侧安装在一起。
[0130]
更加具体地说,任一升降平台302也设有上下两个平台,任一平台的左右两端均设有限位传感器,两个限位传感器的长度比置鞋板略短。如果两个限位传感器都被触发,则说明置鞋板正好放置在平台上,此时升降平台302可以上下移动;如果只有一个限位传感器被触发,则说明此时置鞋板有一部分放在了平台上,另外一部分没有放在平台上;如果两个限位传感器都没有被触发,则说明置鞋板已经完全离开了平台,此时升降平台302也可以任意升降。
[0131]
循环升降机构的运行过程如图20(a)、(b)、(c)、(d)、(e)所示,箭头方向即为链条的运转方向。其中,如图20(a)所示,此时的状态是1号升降平台302正好处于左侧升降空间20的最顶端,而5号升降平台302正好处于右侧升降空间20的最底端,此时5号升降平台302正好可以与输出模块5互传鞋子;如图20(b)所示,在图20(a)的基础上链条逆时针转动,左侧的升降平台302全部下降,而右侧的升降平台302全部上升;如图20(c)所示,此时左侧的4号升降平台302正好下降到左侧空间的最底端,此时4号升降平台302正好可以与输出模块5的内侧流水线互传鞋子;如图20(d)所示,4号升降平台302随着链条由左侧空间向右侧空间移动,而8号升降平台302(顶部)随着链条由右侧空间向左侧空间移动;如图20(e)所示,8号升降平台302进入左侧升降空间20,并且正好处于图20(a)的1号升降平台302位置,4号传输平台完全进入右侧空间,并且正好处于图20(a)的5号升降平台302位置。至此,一个升降平台302的移动过程即可完成。
[0132]
消毒模块4:
[0133]
为了便于对用户脱下来的鞋子进行消毒和除臭,柜体01内还可以设置消毒模块4,消毒模块4可以设于存放模块2的上方,且通过升降传输模块3对来自输出模块5的待消毒鞋进行传输。
[0134]
实施例一:
[0135]
如图21和22所示,消毒模块4设有可沿横向和纵向传送的消毒平台41,作为优选的,消毒平台41设有横向传送组件411和纵向传送组件412,横向传送组件411可以参考清洁模块1中的横向传送机构111,即横向传送组件411可以设置为传送带机构或者通过滚筒实现横向传送的机构;纵向传送组件412可以参考清洁模块1中的纵向滑移机构115,即纵向传送组件412可以设置为包括纵向滑块和纵向丝杆底座总成的结构。
[0136]
消毒模块4内部设置有左右两个消毒仓40,左右仓室中均设置有可横向移动的消毒平台41,两个消毒仓40中间空白的空间是用来安装升降模块的升降空间20。当有鞋子需要进行消毒操作时,升降传输模块3的升降平台302升至与消毒模块4的消毒平台41齐平,然后同时驱动升降平台302和消毒平台41的横向传送组件411,鞋子就可以连同置鞋板进入消毒仓40中。当鞋子进入消毒模块4以后,消毒模块4按照设定程序打开紫外线消毒灯42或者开启臭氧模块进行消毒,紫外线消毒灯42或者臭氧模块可以设置消毒仓40内的顶部位置,消毒后还可以通过烘干模块进行烘干处理。当消毒程序完成以后,消毒平台41的横向传送组件411和升降平台302的横向传送机构同时驱动,鞋子从消毒模块4进入到升降传输模块3
内部,再由升降传输模块3输送到相应的存放模块2内部存放。
[0137]
实施例二:
[0138]
如图23和25所示,在本实施例中,消毒模块4中的消毒平台41采用横向传送组件411和可升降的纵向传送组件412实现鞋子的输送。与第一种实施例中横向传送机构111不一样的是,本实施例中的横向传送机构111设有多个并排设置的消毒滚筒4111以及与消毒滚筒4111一一对应设置的消毒滚筒电机4112,消毒滚筒电机4112用于带动消毒滚筒4111转动;纵向传送组件412具体为可升降的纵向滑杆4113,纵向滑杆4113与消毒滚筒4111相互交叉布置安装,且纵向滑杆4113连接有顶升组件,顶升组件用于顶升纵向滑杆4113以实现将待清洁鞋顶离消毒滚筒4111,待鞋子脱离消毒滚筒4111,鞋子即可在纵向滑杆4113的带动下沿纵向传输至目标位置。
[0139]
这样一来,多个消毒滚筒4111的转动可以实现置鞋板沿横向的传输,当纵向滑杆4113被顶升组件顶升至工作高度以后,置鞋板连同纵向滑杆4113被顶升组件顶升起来,脱离消毒滚筒4111,此时置鞋板即可纵向移动。
[0140]
输出模块5:
[0141]
如图26和27所示,该输出模块5可以设置为包括滑轨机构50以及与滑轨机构50滑动连接的流水线总成51。具体地,滑轨结构包括两条相对设置的滑轨,流水线总成51设于两条滑轨之间,比如可以在滑轨上设置可供流水线总成51沿水平方向滑动的滑槽,滑槽中安装有与流水线总成51连接的滑轮,通过滑轮沿滑槽的定向滑动,以实现流水线总成51相对柜体01的伸缩运动。当然,滑轨也可以设置为可伸缩的滑轨组件,其中滑轨组件的伸缩杆的内接触面通过螺丝与流水线总成51连接,滑轨组件的滑轨外接触面通过螺丝与智能鞋柜的整体框架连接,伸缩杆可在外力的驱动下相对滑轨伸缩运动。
[0142]
更加具体地说,上述流水线总成51包括双层流水线机构511和升降流水线机构512,双层流水线机构511包括第一层流水线机构5111和位于第一层流水线机构5111的下方的第二层流水线机构5112。当升降流水线机构512下降至与第二层流水线机构5112齐平时,升降流水线机构512用以承接来自第二层流水线机构5112的置鞋板;当升降流水线机构512上升至与第一层流水线机构5111齐平时,升降流水线机构512用以将置鞋板输送至第一层流水线机构5111。第一层流水线机构5111用于鞋柜的出鞋和收鞋,第二层流水线机构5112用于置鞋板的传输。
[0143]
第一层流水线机构5111和第二层流水线机构5112均为传送带机构或者滚筒传送机构,当然,第一层流水线机构5111和第二层流水线机构5112上均设有限位传感器,用于确定置鞋板的具体位置。同时,第一层流水线机构5111和升降流水线机构512上还设有用于供用户站立的承重支撑板5113,承重支撑板5113的下方沿横向安装有多个结构加强方钢5114。
[0144]
输出模块5的驱动力由安装在输出模块5前端的牵引驱动轮提供,当需要伸缩运动时,先将升降流水线机构512升高至脱离地面,再由安装在升降流水线机构512下方的牵引轮电机驱动牵引驱动轮,从而完成伸缩动作。当然,上述输出模块5也可以设置链条拉伸机构,通过链条拉伸机构控制双层流水线机构511的伸缩运动,链条拉伸机构设于滑轨的内部,链条拉伸机构包括主动链轮、从动链轮和传动链,传动链与滑轨的伸缩杆的重合位置设置有链条固定孔,用于供插销固定,这样即可通过链传动机构带动伸缩杆及双层流水线机
构511伸缩运动。
[0145]
升降流水线机构512可以包括升降流水线5121、升降数字舵机5124以及与升降流水线5121固接的平衡数字舵机5122,平衡数字舵机5122和升降数字舵机5124通过舵机支架5123连接。当需要上升时,升降数字舵机5124顺时针旋转,同时平衡数字舵机5122逆时针旋转,则可以保证升降流水线5121平稳地上升;下降时,两个数字舵机正好执行相反动作。当然,升降流水线5121具体为传送带机构。
[0146]
在上述基础上,柜体01还设有通风系统,通风系统包括设有进风装置的进风口6、扩散风道7、集风风道8和设有排风装置的排风口9。通过进风装置向进风口6内吸入空气,以供扩散风道7将进入柜体01内的空气导入存放模块2,通过集风风道8将存放模块2中的空气引向排风口9,以供排风装置将空气排出柜体01。
[0147]
当然,进风口6可以设于输出模块5的上方位置,排风口9可以设于消毒模块4的左侧位置;进风装置和排风装置均采用风扇。
[0148]
需要说明的是,在本说明书中,诸如第一和第二之类的关系术语仅仅用来将一个实体与另外几个实体区分开来,而不一定要求或者暗示这些实体之间存在任何这种实际的关系或者顺序。
[0149]
以上对本发明所提供的智能鞋柜进行了详细介绍。本文中应用了具体个例对本发明的原理及实施方式进行了阐述,以上实施例的说明只是用于帮助理解本发明的方案及其核心思想。应当指出,对于本技术领域的普通技术人员来说,在不脱离本发明原理的前提下,还可以对本发明进行若干改进和修饰,这些改进和修饰也落入本发明权利要求的保护范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1