机器人清洁器的制作方法
1.本公开涉及一种机器人清洁器,更具体地,涉及一种具有旋转拖把的机器人清洁器,所述旋转拖把用于使用存储在水箱中并供应到旋转拖把的水来拖地板。
背景技术:
2.用于清洁作为待清洁表面的地板的机器人清洁器已经被投放,其中,当在待清洁表面上移动时,机器人清洁器通过从表面抽吸异物来移除异物,或者当与待清洁表面接触时,机器人清洁器通过从表面擦拭异物来清洁待清洁表面。
3.一种能够拖待清洁表面的机器人清洁器通过借助在绕大致垂直于待清洁表面的旋转轴线旋转时的旋转摩擦在表面上移动并且通过利用旋转摩擦来拖表面来执行清洁。此外,还公开了一种具有用湿拖把拖待清洁表面的功能的机器人清洁器,其中,水箱安装在机器人清洁器中,以将水箱中的水供应到旋转拖把,该旋转拖把通过旋转而移动以拖地板。
4.在具有固定到其的水箱的机器人清洁器中,将水箱中的水供应到旋转拖把是稳定的结构。然而,具有可拆卸水箱的机器人清洁器具有的问题在于,当在安装水箱的同时将水箱中的水供应到旋转拖把时,水可能从连接部分泄漏。
5.韩国公开专利公报no.kr10-2019-0015940公开了一种具有可拆卸水箱的机器人清洁器的结构,但是对于水从水箱被供应到安装结构所在的部分没有单独地设置固定装置和按压装置,从而导致供应到主体中的水可能部分地泄漏到外部的问题。
6.此外,如果为水箱和安装结构设置坚固的固定装置和按压装置,则存在难以将水箱与安装结构分离的问题,并且当用户试图分离水箱时,水箱可能被损坏或者水箱中的水可能泄漏。
技术实现要素:
7.技术问题
8.本公开的一个目的是提供一种包括可拆卸水箱的机器人清洁器,其中,安装的水箱可被稳定地固定。
9.本公开的另一目的是提供一种包括可拆卸水箱的机器人清洁器,其中,可使在连接水箱的部分处发生的水泄露最小化。
10.本公开的又一目的是提供一种机器人清洁器,其中,在水箱和主体之间的连接部分处维持牢固固定的同时,用户需要很小的力来分离水箱。
11.本公开的又一目的是提供一种机器人清洁器,其中,固定装置设置在水箱的一侧处,并且在绕水箱的作为旋转中心的另一侧旋转的同时,水箱可连接到主体或与主体分离,从而允许水箱和主体之间的平滑连接和分离。
12.本公开的目的不限于上述目的,并且本领域技术人员从以下描述将清楚地理解本文未描述的其它目的。
13.技术方案
14.为了实现上述目的,本公开提供了一种机器人清洁器,其中,产生磁力的固定装置设置在水箱的一侧处,并且在绕水箱的另一侧旋转的同时,水箱可连接到主体或与主体分离。
15.具体地,根据本公开的一个方面,上述目的通过提供一种机器人清洁器来实现,所述机器人清洁器包括:水箱,所述水箱形成用于存储水的空间;主体,所述主体具有形成在其后侧处的水箱壳体,所述水箱壳体形成安装空间,所述水箱安装在所述安装空间中;一对旋转拖把,所述一对旋转拖把以可旋转的方式安装在所述主体的下侧处,并且适于通过旋转来移动所述主体并拖待清洁表面;供应喷嘴,所述供应喷嘴设置在所述水箱壳体的一侧处,并且当连接到所述水箱时,将存储在所述水箱中的水供应到所述一对旋转拖把中的每一个;排放喷嘴,所述排放喷嘴设置在沿第一方向与所述水箱的中心间隔开的位置处,并且当所述水箱安装在所述水箱壳体中时,所述排放喷嘴连接到所述供应喷嘴以使所述水箱与所述供应喷嘴连通:固定单元,所述固定单元通过产生磁力在所述水箱壳体和所述水箱之间提供联接力,并且在所述第一方向上与所述水箱的中心间隔开;以及防分离单元,所述防分离单元在与所述第一方向相反的方向上与所述水箱的中心间隔开,并且限制所述水箱在所述安装空间中的向前和向后移动。
16.所述水箱可以通过绕与所述防分离单元相邻的点在正向方向上旋转而与所述水箱壳体分离。
17.所述水箱可以通过绕与所述防分离单元相邻的所述点在反向方向上旋转而连接到所述水箱壳体。
18.所述水箱可以通过绕所述水箱壳体的与所述防分离单元相邻的边缘在所述正向方向上旋转而与所述水箱壳体分离。
19.所述固定单元可以包括:水箱侧固定构件,所述水箱侧固定构件设置在所述水箱处;以及主体侧固定构件,所述主体侧固定构件设置成对应于所述水箱壳体中的所述水箱侧固定构件。
20.所述水箱壳体可以包括:开口,所述水箱通过所述开口进入;壳体前表面,所述壳体前表面设置成面向所述开口;以及第一壳体侧表面和第二壳体侧表面,所述第一壳体侧表面和所述第二壳体侧表面与所述壳体前表面相交,具有限定所述开口的边缘的一部分的一端和连接到所述壳体前表面的另一端,并且设置成面向彼此,其中,所述主体侧固定构件可以设置在所述壳体前表面上。
21.所述主体侧固定构件可以在与所述第一壳体侧表面相邻的位置处设置在所述壳体前表面上。
22.所述防分离单元还可以包括防分离凹槽,所述防分离凹槽形成在所述第二壳体侧表面处,并限定所述水箱的一部分被锁定在其中的空间。
23.所述防分离凹槽可以从所述第二壳体侧表面的中心朝向所述开口的所述边缘偏置。
24.所述水箱可以包括水箱外壳,所述水箱外壳形成用于存储水的空间;并且所述水箱外壳具有:外壳前表面,所述外壳前表面设置成当所述水箱连接到所述水箱壳体时面向所述壳体前表面;第一外壳侧表面和第二外壳侧表面,所述第一外壳侧表面和所述第二外壳侧表面设置成面向所述第一壳体侧表面和所述第二壳体侧表面;以及外壳后表面,所述
外壳后表面暴露于外部,其中,所述水箱侧固定构件可以设置在所述外壳前表面处。
25.所述防分离单元可以包括从所述第二外壳侧表面突出的防分离肋。
26.所述防分离肋可以包括:第一部分,所述第一部分从所述第二外壳侧表面在与所述第二外壳侧表面相交的方向上延伸;以及第二部分,所述第二部分连接到所述第一部分,并且在与所述第一部分相交的方向上延伸。
27.所述防分离单元可以包括:止动件,所述止动件具有从所述第二壳体侧表面到所述安装空间的弹性恢复力;以及止动件凹槽,所述止动件凹槽形成在所述第二外壳侧表面处,并且所述止动件插入所述止动件凹槽中。
28.所述水箱还可以包括边缘锁定部分,所述边缘锁定部分被锁定在所述水箱壳体的所述开口的所述边缘上。
29.当所述水箱通过所述边缘锁定部分被锁定在所述开口的所述边缘上时,所述水箱可以旋转以与所述水箱壳体分离。
30.根据本公开的另一方面,上述目的通过提供一种机器人清洁器来实现,所述机器人清洁器包括:水箱,所述水箱形成用于存储水的空间;主体,所述主体具有形成在其后侧处的水箱壳体,所述水箱壳体形成安装空间,所述水箱安装在所述安装空间中;一对旋转拖把,所述一对旋转拖把以可旋转的方式安装在所述主体的下侧处,并且适于通过旋转来移动所述主体并拖待清洁表面;水箱侧固定构件,所述水箱侧固定构件设置在所述水箱处并且连接到所述水箱壳体;防分离单元,所述防分离单元相对于所述水箱的中心设置在与所述水箱侧固定构件相对的位置处,并且限制所述水箱在所述安装空间中的向前和向后移动;以及边缘锁定部分,所述边缘锁定部分相对于所述水箱的中心设置在与所述水箱侧固定构件相对的位置处,并且被锁定在所述水箱壳体的开口的边缘上。
31.当所述水箱通过所述边缘锁定部分被锁定在所述开口的所述边缘上时,所述水箱可以在正向方向上旋转以与所述水箱壳体分离。
32.当所述水箱通过所述边缘锁定部分被锁定在所述开口的所述边缘上时,所述水箱可以在反向方向上旋转以连接到所述水箱壳体。
33.所述边缘锁定部分和所述防分离单元可以设置在所述水箱的同一个表面上。
34.所述水箱侧固定构件可以设置在所述水箱的与所述水箱的所述一个表面相交的另一表面处,所述边缘锁定部分和所述防分离单元设置在所述一个表面上。
35.其它实施方式的细节包括在详细描述和附图中。
36.本发明的有益效果
37.根据本公开,机器人清洁器具有以下效果中的一个或多个。
38.首先,由于水箱侧固定构件和主体侧固定构件分别设置在水箱和水箱壳体处,使得水箱可以稳定地安装在水箱壳体中。特别地,在磁体用作主体侧固定构件和水箱侧固定构件的情况下,在它们之间产生强的吸引力,使得水箱可以被稳定地固定。
39.其次,用于固定水箱的固定装置仅设置在用于供应水的管附近,并且用于防止水箱与主体分离的防分离单元设置在与管相对的位置处,使得在管附近产生的强联接力可以防止泄漏,并且水箱可以通过由使水箱相对于防分离单元旋转产生的杠杆效应而容易地分离,从而减少分离期间水箱的损坏。
40.第三,当水箱和主体连接时暴露在主体的外表面处的边缘锁定部分设置在与用于
固定水箱的固定装置相对的位置处,使得水箱在被锁定到主体的外表面的同时旋转,以与主体分离,从而产生杠杆效应,并便于防分离装置的分离。
41.第四,主体侧固定构件和水箱侧固定构件中的每一者围绕供水的流动设置的供应喷嘴和排放喷嘴的圆周布置成环形,并且主体侧固定构件和水箱侧固定构件牢固地压靠彼此以防止水泄漏,从而使得能够平稳地将水供应到旋转拖把。
42.第五,在设置有固定构件所在的部分处设置密封件,以防止水流到磁体,从而在延长的时间段内维持由磁体产生的磁力,并确保磁体的长使用寿命。
43.第六,用于从水箱壳体中抽出水箱的把手设置在设置固定构件所在的位置处,从而允许用户容易地抽出水箱,并提供使用水箱的便利。
44.然而,本公开的效果不限于上述效果,并且本领域技术人员从所附权利要求的以下描述将清楚地理解未在此描述的其它效果。
附图说明
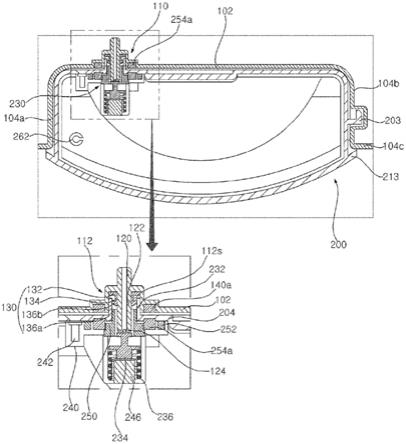
45.图1a是根据本公开的实施方式的机器人清洁器的后视立体图。
46.图1b是图1a的机器人清洁器的后视立体图,水箱从该机器人清洁器移除。
47.图1c是图1a的机器人清洁器的仰视图。
48.图2是根据本公开的实施方式的水箱的立体图。
49.图3是根据本公开的实施方式的在左右方向上截取的水箱的横截面图。
50.图4是根据本公开的实施方式的在上下方向上截取的水箱的排放喷嘴的横截面图。
51.图5是根据本公开的实施方式的在左右方向上截取的安装在水箱壳体中的水箱的横截面图。
52.图6是示出图5的与水箱壳体分离的水箱的图。
53.图7是根据本公开的实施方式的安装在水箱壳体中的水箱的仰视图。
54.图8是根据本公开的另一实施方式的在左右方向上截取的安装在水箱壳体中的水箱的横截面图。
55.图9是示出图8的与水箱壳体分离的水箱的图。
56.图10是示出主体的模块安装部的仰视正视图。
57.图11是联接到主体的模块安装部的拖把模块的俯视正视图。
58.图12是图11的拖把模块的分解立体图。
具体实施方式
59.从下面参照附图描述的示例性实施方式,将更清楚地理解本公开的优点和特征以及用于实现本公开的优点和特征的方法。然而,本公开不限于以下实施方式,而是可以以各种不同的形式来实现。提供实施方式仅是为了完成本公开的公开,并向本公开所属领域的普通技术人员充分提供本公开的范畴,并且本公开将由所附权利要求的范围限定。在整个说明书中,只要可能,相同的附图标记通常表示相同的元件。
60.在机器人清洁器和水箱的描述中,水箱被抽出的方向被定义为向后方向,与向后方向相反的方向被定义为向前方向,旋转拖把被布置的方向被定义为向下方向,与向下方
向相反的方向被定义为向上方向。此外,将与向前方向、向后方向、向上方向和向下方向垂直的两侧的方向定义为左右方向。将基于上述方向描述当水箱安装在水箱壳体中时水箱的构造。
61.具体地,与将左旋转拖把41a的中心轴线osa和右旋转拖把41b的中心轴线osb连接而形成的虚拟线平行的方向被定义为左右方向;与左右方向竖直相交并且定位有水箱的方向被定义为向后方向。
62.在下文中,将参照被提供用于解释机器人清洁器的附图详细描述本公开的实施方式。
63.《整体构造》
64.参照图1,下面将描述根据本公开的实施方式的机器人清洁器1的整体构造。
65.根据实施方式的机器人清洁器1包括:主体30,该主体形成机器人清洁器1的外部并具有内部空间;一对旋转拖把41,所述一对旋转拖把设置在主体30的下侧处,通过旋转移动主体30,并拖待清洁表面(地板表面);水箱200,该水箱安装在主体30处并存储将供应到该对旋转拖把41的水;以及供水模块,该供水模块设置在主体30的内部,并将存储在水箱200中的水供应到所述一对旋转拖把41中的每一个。
66.机器人清洁器1可以包括:缓冲器14,该缓冲器安装在主体30的前部,当与位于主体30的前面的障碍物接触时,检测障碍物或吸收由与障碍物的接触引起的冲击;以及传感器16,该传感器设置成识别主体30的位置。
67.主体30可以具有扁平盘形。在主体30的内部空间中,设置有印刷电路板(未示出),该印刷电路板包括用于调节供水模块(未示出)和该对旋转拖把41的旋转速度或调节从水箱200供应到该对旋转拖把41的水量的控制器。在主体30的内部空间中,提供外部电力以充电,并且充电的电力被提供给印刷电路板(未示出)或用于使该对旋转拖把41旋转的马达(未示出)。
68.供水模块可以包括:供应喷嘴110,该供应喷嘴连接到安装在主体30处的水箱200;供应软管(未示出),该供应软管用于连接供应喷嘴110和该对旋转拖把41中的每一个;以及泵(未示出),该泵设置在供应软管上,并抽吸存储在水箱200中的水以将水输送到该对旋转拖把41中的每一个。
69.在从顶部观察时,该对旋转拖把41a和41b通过顺时针或逆时针旋转来拖地板。该对旋转拖把41a、41b包括左旋转拖把41a和右旋转拖把41b。在该实施方式中,该对旋转拖把41设置成绕基本在上下方向上延伸的旋转轴线osa和osb旋转。
70.该对旋转拖把41a和41b设置在主体30的下侧处。该对旋转拖把41a和41b设置在水箱200的前部。
71.《水箱壳体》
72.在下文中,将参照图1b和图5描述根据本公开的实施方式的水箱壳体100。
73.主体30包括水箱壳体100,该水箱壳体设置在主体30的后部并形成水箱200安装在其中的安装空间100s。水箱壳体100可与主体30一体形成。替代地,水箱壳体100可与主体30分开设置,并可设置在主体30的后部。水箱壳体100形成与水箱200的外形对应的安装空间100s,使得水箱200可安装在安装空间100s中。
74.例如,水箱壳体100由向内凹陷的主体30的侧表面10b形成,使得当水箱200联接到
水箱壳体100时,水箱200的至少一个表面可暴露于外部。在这种情况下,水箱200的暴露表面限定主体30的侧表面10b的一部分。
75.此外,水箱壳体100可形成为主体30的具有开口的空间,该开口通向主体30的侧表面和下侧。主体30下侧处的敞开空间用于暴露水箱200的把手260。
76.水箱壳体100具有壳体前表面102、第一壳体侧表面104a、第二壳体侧表面104b、壳体上表面和壳体下表面106。
77.当水箱200安装在水箱壳体100中时,壳体前表面102与水箱200接触或设置成最靠近水箱。壳体前表面102设置成面向水箱壳体100的开口或主体30的侧表面10b。具体地,壳体前表面102可以限定与前后方向相交并且与上下方向和左右方向平行的表面。
78.第一壳体侧表面104a和第二壳体侧表面104b形成面向水箱200的两个侧表面的表面,并且当水箱200插入水箱壳体100或从该水箱壳体抽出时引导水箱200。第一壳体侧表面104a和第二壳体侧表面104b的一端限定水箱壳体100的开口的边缘104c的一部分。第一壳体侧表面104a和第二壳体侧表面104b的另一端连接到壳体前表面102。第一壳体侧表面104a和第二壳体侧表面104b设置成与壳体前表面102相交。第一壳体侧表面104a和第二壳体侧表面104b的另一端连接到主体30的侧表面10b,并且限定水箱壳体100的开口的边缘104c的两侧。
79.当水箱200安装在水箱壳体100中时,壳体上表面设置成面向水箱200的上表面。当水箱200安装在水箱壳体100中时,壳体上表面覆盖水箱200的顶部。
80.当水箱200安装在水箱壳体100中时,壳体下表面106支撑水箱200。壳体下表面106具有比壳体上表面小的宽度,并且具有比水箱200的宽度小的宽度,使得当水箱200安装在水箱壳体100中时,水箱200的把手260露出。
81.壳体前表面102、第一壳体侧表面104a、第二壳体侧表面104b、壳体上表面(未示出)和壳体下表面106形成水箱200安装在其中的安装空间100s。水箱壳体100的开口形成有面向壳体前表面102的一侧和壳体下表面106的敞开的部分。
82.这里,将水箱200安装在水箱壳体100中的时间可以指水箱200的前表面与壳体前表面102接触或最靠近壳体前表面设置的状态,以及设置在水箱200处的排放喷嘴230和设置在水箱壳体100处的供应喷嘴110彼此连接的状态,这将在稍后描述。
83.在壳体前表面102处,设置有供应喷嘴110,当水箱200安装在水箱壳体100中时,该供应喷嘴连接到水箱200。供应喷嘴110在第一方向上与水箱200的中心间隔开。具体地,供应喷嘴110与水箱200的中心向左间隔开。更具体地,供应喷嘴110可以设置在从壳体前表面102朝向第一壳体侧表面104a偏置的位置处。
84.供应喷嘴110具有:插入部112,该插入部形成供水箱200的排放喷嘴230插入到壳体前表面102的前部中的插入空间112s;连接喷嘴120,该连接喷嘴具有中空的内部空间,并从插入部112的中心向前延伸;按压喷嘴122,该按压喷嘴具有中空的内部空间,并从插入部112的中心朝向水箱200延伸;插入部密封件130,该插入部密封件设置在插入空间112s处,并压靠插入到插入空间112s中的排放喷嘴230。
85.插入部112从壳体前表面102向前突出,并且在插入部112内部形成插入空间112s。插入部112具有:插入部周向表面114,该插入部周向表面从壳体前表面102向前突出,并在插入部112的内部形成圆柱形形状的插入空间112s;以及插入部前表面116,该插入部前表
面设置在插入部周向表面114的端部上。
86.插入空间112s可以形成为环形形状。按压喷嘴122可设置在插入空间112s的中间。插入部密封件130设置在插入空间112s中。当水箱200安装在水箱壳体100中时,插入部密封件130压靠在水箱200的排放喷嘴230,从而防止从排放喷嘴230供应的水泄漏到外部。
87.插入部密封件130可以沿着按压喷嘴122的周向表面设置。插入部密封件130具有:端部接触表面132,该端部接触表面设置在插入部前表面116处,以与排放喷嘴230的插入喷嘴232的端部接触;按压喷嘴接触表面134,该按压喷嘴接触表面连接到端部接触表面132并沿着按压喷嘴122的周向表面延伸;以及至少一个接触突起136,该至少一个接触突起从按压喷嘴接触表面134朝向插入空间112s突出。
88.接触突起136以漏斗形状从按压喷嘴接触表面134朝向插入部前表面116突出。
89.连接喷嘴120从插入部前表面116向前突出,并且连接到设置在主体30内部的供应软管(未示出)。
90.当水箱200安装在水箱壳体100中时,按压喷嘴122从插入部前表面116向后突出,并按压排放端口阀234的一侧。按压喷嘴122和连接喷嘴120沿前后方向设置,并且具有彼此连通的中空内部。
91.按压喷嘴122从壳体前表面102向后突出。从由按压喷嘴122形成的管状部分向后突出的间隔突起124设置在按压喷嘴122的端部处。多个间隔突起124沿着由按压喷嘴122形成的管状部分间隔开。因此,即使当按压喷嘴122与排放端口阀234接触时,按压喷嘴122也不会被阻塞。
92.在水箱壳体100处设置用于固定安装在水箱壳体100中的水箱200的布置的主体侧固定构件140。主体侧固定构件140和水箱侧固定构件254可以统称为固定单元。
93.主体侧固定构件140可以与水箱侧固定构件254对应地设置在水箱壳体100中。主体侧固定构件140设置在壳体前表面102处。具体地,主体侧固定构件140在与第一壳体侧表面104a相邻的位置处设置在壳体前表面102处。
94.为了维持供应喷嘴110和排放喷嘴230之间的联接力,主体侧固定构件140可以设置成与供应喷嘴110相邻。具体地,主体侧固定构件140可以具有设置在插入部112的圆周上的环形形状。作为主体侧固定构件140,可以使用产生磁力的永磁体。具有强磁力的稀土磁体也可用作主体侧固定构件140。
95.参照图7,用于支撑主体30的后部分的辅助轮18可以设置在壳体下表面106的下方。
96.《水箱》
97.在下文中,将参照图2、图3和图5描述根据本公开的实施方式的水箱200。
98.水箱200包括:水箱外壳202,该水箱外壳形成用于存储水的空间;开口盖,该开口盖用于打开和关闭形成在水箱外壳202的上侧处的开口(未示出);排放喷嘴230,当水箱200安装在水箱壳体100中时,该排放喷嘴连接到供应喷嘴110;以及水箱侧固定构件,该水箱侧固定构件用于维持安装在水箱壳体100中的水箱200。
99.水箱外壳202具有与由水箱壳体100形成的安装空间100s对应的形状。因此,水箱外壳202可以插入到由水箱壳体100形成的安装空间100s中或从该安装空间抽出。
100.水箱外壳202具有:外壳前表面204,当水箱200安装在水箱壳体100中时,该外壳前
表面面向壳体前表面102;第一外壳侧表面206a和第二外壳侧表面,该第一外壳侧表面和第二外壳侧表面面向第一壳体侧表面104a和第二壳体侧表面104b;外壳上表面208,该外壳上表面面向壳体上表面;外壳下表面210,该外壳下表面面向壳体下表面106;以及外壳后表面212,该外壳后表面设置在后侧处并暴露于外部。
101.在水箱外壳202的上侧形成有开口(未示出),该开口是敞开的以将水供应到水箱外壳202的内部,并且该开口设置有用于打开和关闭该开口的开口盖220。开口盖220设置在外壳上表面208处,并且开口盖220设置在形成有开口所在的外壳上表面208处。
102.在水箱外壳202的上侧处形成有用于使水箱200的内部和外部连通的空气通道222a。空气通道222a可以形成在安装在水箱外壳202的上侧处的单独的通道构件222处。也就是说,如图2所示,具有空气通道222a的通道构件222可以设置在外壳上表面208处。
103.空气通道222a形成在外壳上表面208处。当水箱200安装在水箱壳体100中时,外壳上表面208可与壳体上表面间隔开预定距离。因此,即使在水箱200安装在水箱壳体100中时,水箱200中的水通过排放喷嘴230被排放到水箱200的外部时,外部空气也可以通过空气通道222a被吸入到水箱200中。
104.排放喷嘴230设置在外壳前表面204处。排放喷嘴230可以在外壳前表面204上沿第一方向偏置。排放喷嘴230可以被偏置到外壳前表面204的左侧或右侧。根据本公开的实施方式的排放喷嘴230被偏置到外壳前表面204的左侧。连接软管固定构件262(将在下面描述)被偏置到外壳下表面210的左侧,使得连接软管(未示出)的长度可以被最小化。当水箱200安装在水箱壳体100中时,排放喷嘴230连接到供应喷嘴110。
105.排放喷嘴230包括:插入喷嘴232,该插入喷嘴插入到插入空间112s中,并且具有通向前侧的排放端口232a;排放端口阀234,该排放端口阀设置在插入喷嘴232的后面,并用于通过向前和向后移动打开和关闭排放端口232a;弹性构件236,该弹性构件用于在一个方向上向排放端口阀234施加弹性力;以及喷嘴壳体240,该喷嘴壳体安装在水箱外壳202中并形成用于安装排放端口阀234的空间。
106.插入喷嘴232具有圆柱形形状并且从外壳前表面204向前突出。当水箱200安装在水箱壳体100中时,插入喷嘴232插入到插入空间112s中。当水箱200安装在水箱壳体100中时,插入喷嘴232可设置在按压喷嘴122和插入部周向表面114之间。当水箱200安装在水箱壳体100中时,插入喷嘴232可压靠插入部密封件130。
107.排放端口阀234设置在由喷嘴壳体240形成的内部空间中,以向前和向后移动。排放端口阀234具有:第一表面234a,当水箱200安装在水箱壳体100中时,该第一表面压靠按压喷嘴122;第二表面234b,该第二表面与第一表面234a向后间隔开,并且与内部密封件250接触以限制排放端口阀234的向前移动;以及引导突起234c,该引导突起从第二表面234b向后突出并沿着形成在喷嘴壳体240处的阀移动引导件246移动排放端口阀234。
108.第一表面234a的直径234ad小于第二表面234b的直径234bd。第一表面234a与第二表面234b向前间隔开。第一表面234a的直径234ad小于内部密封件250的内周表面的直径250d。第二表面234b的直径234bd大于内部密封件250的内周表面的直径250d。第二表面234b与设置在后侧处的弹性构件236接触。因此,当没有力单独地施加到排放端口阀234时,排放端口阀234通过弹性构件236向前移动。当没有力单独地施加到排放端口阀234时,排放端口阀234通过弹性构件236的弹性力与内部密封件250接触。
109.引导突起234c从第二表面234b向后突出。参照图4,排放端口阀234在上下方向上包括一对引导突起234c。其中设置有阀移动引导件246的引导凹槽234d形成在该对引导突起234c之间。
110.喷嘴壳体240安装在水箱外壳202的内部。喷嘴壳体240可以经由单独的联接构件242固定到水箱外壳202的内部。
111.参照图4,喷嘴壳体240包括突出到水箱200内部的内部喷嘴244。内部喷嘴244从喷嘴壳体240向下突出。延伸到水箱200的外壳下表面210的单独的连接软管(未示出)可以连接到内部喷嘴244。用于固定连接软管的另一端的连接软管固定构件262可以设置在外壳下表面210处。
112.参照图4,喷嘴壳体240包括阀移动引导件246,该阀移动引导件从喷嘴壳体240的后表面向前突出并引导排放端口阀234的移动。阀移动引导件246可设置在形成于排放端口阀234处的引导凹槽234d处。当阀移动引导件246插入到引导凹槽234d中时,排放端口阀234可向前和向后移动。
113.多个密封件244和250设置在喷嘴壳体240与水箱200的内表面之间。在喷嘴壳体240与水箱200的内表面之间设置有内部密封件250和外部密封件252,其中,内部密封件250设置在形成有排放端口232a所在的部分处,并且外部密封件252设置在喷嘴壳体240的外周表面上。
114.内部密封件250设置在具有排放端口232a的水箱外壳202处,并限制向前和向后移动的排放端口阀234的移动。当水箱200没有安装在水箱壳体100中时,排放端口阀234压靠内部密封件250。内部密封件250可以具有环形形状。内部密封件250可以具有形成在其中心处并与排放端口232a连通的密封件开口250a。
115.外部密封件252具有比内部密封件250更大的半径,该内部密封件可在径向方向上与外部密封件252间隔开。外部密封件252可具有环形形状。水箱侧固定构件254a和254b可设置在内部密封件250和外部密封件252之间。因此,内部密封件250和外部密封件252可以防止水流入设置在内部密封件250和外部密封件252之间的水箱侧固定构件254a和254b中。
116.产生磁力的水箱侧固定构件254a和254b设置在喷嘴壳体240与水箱200的内表面之间。水箱侧固定构件254a和254b插设在外部密封件252和内部密封件250之间。
117.水箱侧固定构件254a和254b设置在外壳前表面204处。当水箱200安装在水箱壳体100中时,水箱侧固定构件254a和254b设置成与主体侧固定构件140a和140b相邻。
118.作为水箱侧固定构件254a和254b,可以使用产生磁力的永磁体。另外,也可以使用具有强磁力的稀土磁体作为水箱侧固定构件254a和254b。
119.水箱200具有把手260,该把手设置在水箱外壳202的一侧处,并且具有当用户拉出安装在水箱壳体100中的水箱200时允许用户容易地握住水箱200的形状。参照图7,把手260设置在外壳下表面210处。具体地,把手260可以从外壳下表面210的中心在第一方向(水箱侧固定构件被偏置的方向)上被偏置。
120.由于把手260形成在从外壳下表面210的中心向左偏置的位置处,所以当用户拉动把手260时,可以容易地提供扭矩以使水箱200在一个方向上旋转。
121.产生磁力的固定单元提供水箱壳体100和水箱200之间的联接力,并且在第一方向上与水箱200的中心间隔开。
122.防分离单元限制水箱200在安装空间100s中的向前和向后移动。防分离单元在与第一方向相反的方向上与水箱200的中心间隔开。防分离单元和固定单元可相对于水箱200的中心沿相反的方向设置。因此,由于设置在水箱200的一侧处的固定单元,所以防分离单元可以补充水箱200的另一端处的减弱的联接强度。此外,如将在下面描述的,防分离单元可在水箱200与水箱壳体100分离的开始时提供水箱200的旋转中心。
123.例如,防分离单元可以包括防分离肋203和防分离凹槽108。然而,防分离单元可以具有其它结构,如将在下面描述的。
124.防分离肋203可以形成在水箱200或水箱壳体100处。将基于其中防分离肋203设置在水箱200处的结构给出下面的描述。防分离肋203从水箱200的外表面向外突出。具体地,防分离肋203从第二外壳侧表面206b突出。
125.防分离肋203可以具有从第二外壳侧表面206b向右延伸的形状。然而,在这种情况下,如果防分离凹槽108具有与防分离肋203的尺寸相似的尺寸,则当水箱200旋转时,防分离肋203难以连接到防分离凹槽108或与该防分离凹槽分离。此外,如果防分离凹槽108的宽度(前后方向)大于防分离肋203的宽度,则还存在当水箱200连接到水箱壳体100时水箱200的向前和向后移动可能不受限制的缺点。
126.为了解决上述问题,防分离肋203具有:第一部分203a,该第一部分从第二外壳侧表面206b在与第二外壳侧表面206b相交的方向上延伸;以及第二部分203b,该第二部分连接到第一部分203a,并在与第一部分203a相交的方向上延伸。防分离肋203可以向右突出并且可以向前弯曲。
127.在这种情况下,第一部分203a在前后方向上的宽度小于第二部分203b在前后方向上的长度,并且小于防分离凹槽108在前后方向上的宽度。因此,存在的效果在于,当水箱200连接到水箱壳体100时,第二部分203b可限制水箱200的向前和向后移动;当水箱200旋转以与水箱壳体100分离时,具有较小宽度的第一部分203a允许防分离肋203容易地与防分离凹槽108分离。此外,在水箱200连接到水箱壳体100的开始时,第一部分203a还允许防分离肋203容易地插入到防分离凹槽108中。
128.防分离凹槽108形成在水箱壳体100的一个表面处。防分离凹槽108形成在第二壳体侧表面104b处,并且限定水箱200的一部分(防分离肋203)被锁定在其中的空间。防分离凹槽108在左右方向上的长度可以大于防分离肋203的长度。防分离凹槽108在前后方向上的宽度可以大于第一部分203a在前后方向上的宽度,或者可以大于或等于第二部分203b在前后方向上的宽度。
129.对防分离凹槽108和防分离肋203的位置没有限制,但是为了使水箱200绕与防分离装置相邻的位置旋转,使得水箱200可以被分离,防分离凹槽108可以从第二壳体侧表面104b的中心朝向开口的边缘104c偏置。在这种情况下,防分离肋203可以从第二外壳侧表面206b朝向外壳后表面121偏置。
130.参照图6,通过绕与防分离单元相邻的位置在正向方向上旋转,水箱200可与水箱壳体100分离。通过绕与防分离单元相邻的位置在反向方向上旋转,水箱200可连接到水箱壳体100。这里,正向方向可以是逆时针方向,而反向方向可以是顺时针方向,反之亦然。
131.具体地,水箱200可以以这样的方式与水箱壳体100分离,即,当用户拉动把手260时,水箱侧固定构件254与主体侧固定构件140分离,并且水箱200绕水箱200的外表面与水
箱壳体100接触所在的位置旋转。
132.在这种情况下,水箱200还可包括边缘锁定部分213,当水箱200旋转时,该边缘锁定部分限制水箱200的向内移动,并对水箱200产生杠杆效应。边缘锁定部分213允许水箱200绕水箱壳体100的边缘104c旋转,并且允许水箱侧固定构件254和主体侧固定构件140容易地彼此分离。
133.边缘锁定部分213和防分离单元可设置在水箱200的同一个表面上。边缘锁定部分213和防分离单元可以设置在水箱200的一个表面上,该表面与设置水箱侧固定构件254所在的表面相交。
134.边缘锁定部分213锁定在水箱壳体100的开口中。边缘锁定部分213可以从第二壳体侧表面104b的下端突出。边缘锁定部分213可以朝向右侧向上倾斜。水箱壳体100的边缘104c可被锁定在边缘锁定部分213和第二壳体侧表面104b之间。
135.边缘锁定部分213允许水箱200的旋转中心从水箱200的外部朝向水箱200的右后侧偏置,从而便于水箱200的分离。
136.通过绕水箱壳体100的定位成与防分离单元相邻的边缘104c在正向方向上旋转,水箱200可与水箱壳体100分离。具体地,水箱200绕作为中心轴线的水箱壳体100的边缘104d旋转,其中边缘104d由第二壳体侧表面104a与主体30的侧表面10b的连接限定。水箱200的旋转轴线可以与上下方向平行。
137.在另一示例中,水箱200绕作为中心轴线的边缘锁定部分213旋转。当通过边缘锁定部分213锁定在开口的边缘104c上时,水箱200在正向方向上旋转以与水箱壳体100分离。当通过边缘锁定部分213锁定在开口的边缘104c上时,水箱200在反向方向上旋转以连接到水箱壳体100。
138.《第二实施方式》
139.参照图8,下面将描述水箱200和其中安装有水箱200的水箱壳体100的构造。
140.图8所示的水箱200和水箱壳体100的整体构造与以上参照图1至图7所述的构造大致相同。因此,以下将基于与以上参照图1至图7所述的水箱200和水箱壳体100不同的构造来描述图8所示的水箱200和水箱壳体100。
141.在另一实施方式中,当与图1的实施方式相比时,防分离单元的构造是不同的。
142.根据另一实施方式的防分离单元可以包括止动件160和止动件凹槽164。止动件160设置在第二壳体侧表面104b处。止动件160通过止动件弹性构件162对安装空间100s具有弹性恢复力。当施加外部压力时,止动件160可以插入到形成在第二壳体表面104b处的止动件凹槽164中。止动件160可以在与第二壳体侧表面104b相交的方向(左右方向)上往复运动。当没有外力时,止动件160突出到止动件凹槽164的外部,并从第二壳体侧表面104b向内突出。
143.止动件160包括:向后且向下倾斜的倾斜表面160a;以及朝向止动件凹槽164延伸的锁定表面160b。当没有施加外力时,止动件160的倾斜表面160a和锁定表面160b突出到安装空间100s中。因此,当水箱200插入安装空间100s中时,水箱200与倾斜表面160a接触,使得止动件160可移动到止动件凹槽164。然而,一旦水箱200安装在水箱壳体100中,则止动件160插入止动件凹槽280中,并且锁定表面160b防止水箱200从水箱壳体100抽出。
144.水箱200具有止动件凹槽280,当水箱200安装在水箱壳体100中时,止动件160插入
到止动件凹槽中,以便固定水箱200的布置。止动件凹槽280可具有与止动件160的倾斜表面160a和锁定表面160b对应的形状。止动件凹槽264形成在第二外壳侧表面206b处。
145.止动件160设置成与第二外壳侧表面206b的后端相邻,并且连接倾斜表面160a和锁定表面160b的部分可以形成为弯曲形状。
146.参照图9,如图1的实施方式所示,可通过绕边缘止挡件213旋转而使水箱200与水箱壳体100分离。
147.一对旋转拖把41a和41b可以作为模块以可拆卸的方式安装在主体30处。包括该对旋转拖把41a和41b的模块被定义为拖把模块40。
148.参照图10和图11,拖把模块14包括在旋转的同时擦拭地板的至少一个地板布143。拖把模块14包括至少一个旋转拖把141,当从上方观察时,该旋转拖把在与地板接触的同时顺时针或逆时针旋转。拖把模块40可以包括该对旋转拖把41a和41b。当从上方观察时,该对旋转拖把41a和41b通过顺时针或逆时针旋转而拖地板。该对旋转拖把41a和41b包括左旋转拖把41a和右旋转拖把41b。在该实施方式中,旋转拖把41适于绕基本上在上下方向上延伸的旋转轴osa和osb旋转。
149.拖把模块40设置在主体30的下侧处。拖把模块40设置在收集模块50的后面。
150.左旋转拖把41a和右旋转拖把41b中的每一者包括地板布411、旋转板412和旋转轴414。左旋转拖把141a和右旋转拖把141b中的每一者包括水接收部413。左旋转拖把141a和右旋转拖把141b中的每一者具有从动接头415。
151.此外,为左旋转拖把41a和右旋转拖把41b中的每一者设置将在后面描述的地板布411、旋转板412、旋转轴414、水接收部413和从动接头415也是可以理解的。
152.主体30和拖把模块40可以以可拆卸的方式彼此联接。主体30和拖把模块40彼此联接的状态可以被称为“联接状态”。此外,主体30和拖把模块40彼此分离的状态可以被称为“分离状态”。机器人清洁器1包括拆卸模块90,该拆卸模块使拖把模块40与主体30以可拆卸的方式接合。在联接状态下,拆卸模块90可释放拖把模块40与主体30的接合。拆卸模块90操作以允许拖把模块40和主体30以可拆卸的方式联接到彼此。在分离状态下,拆卸模块90可以允许拖把模块40与主体30接合。拆卸模块90可以设置成横跨水箱81和电池bt之间的间隙。
153.机器人清洁器1包括形成主体30的下表面的基部32。基部32形成主体30的下表面、前表面、后表面、左表面和右表面。拖把模块40联接到基部32。收集模块50联接到基部32。在由外壳31和基部32形成的内部空间中设置有控制器co和电池bt。此外,在主体30处设置有拖把驱动部60。在主体30处设置有供水模块(未示出)。在主体30处设置有拆卸模块90。供水模块将存储在水箱200中的水供应到拖把模块40。
154.机器人清洁器1包括形成拖把模块40的外部的模块壳体42。模块壳体42设置在主体30的下侧处。机器人清洁器1包括形成收集模块50的外部的模块箱52。模块箱52设置在主体30的下侧处。模块壳体42和模块箱52在前后方向上彼此间隔开。
155.拖把模块40以可拆卸的方式联接到主体30。拖把模块40联接到主体30的下侧。主体30联接到拖把模块40的上侧。主体30包括模块安装部36,拖把模块40包括主体安装部43。主体安装部43以可拆卸的方式联接到模块安装部36。
156.模块安装部36设置在主体30的下侧处。主体安装部43设置在拖把模块40的上侧
处。模块安装部36设置在基部32的下表面处。主体安装部43设置在模块壳体42的上表面处。
157.模块安装部36和主体安装部43中的任一者在上下方向上突出,并且其中的另一者在上下方向上凹陷以与其中的任一者接合。
158.在该实施方式中,主体安装部43从拖把模块40向上突出。模块安装部36从主体30向上凹陷以与主体安装部43接合。
159.当从顶部观察时,主体安装部43在前后方向上具有非对称形状。如果在拖把模块40的前侧和后侧颠倒的同时将拖把模块40联接到主体30,则主体安装部43可以不与模块安装部36接合。因此,具有非对称形状的主体安装部43可以允许拖把模块40和主体30在预定方向上彼此联接。
160.拖把模块40包括彼此间隔开的一对主体安装部43a和43b。该对主体安装部43a和43b对应于该对旋转拖把41a和41b。该对主体安装部43a和43b对应于该对模块安装部36a和36b。
161.主体30包括彼此间隔开的一对模块安装部36a和36b。该对模块安装部36a和36b对应于该对主体安装部43a和43b。
162.该对主体安装部43a和43b从拖把模块40向上突出。该对模块安装部36a和36b向上凹陷以与该对主体安装部43a和43b接合。
163.模块安装部36包括形成下表面的下表面部361。在上述联接状态下,下表面部361与主体安装部43的上表面部431接触。下表面部361朝向下侧定向。下表面部361可形成为水平的。下表面部361设置在对应周边部363的上侧处。
164.模块安装部36包括沿着下表面部361的圆周设置的对应周边部363。在联接状态下,对应周边部363与主体安装部43的周边部433接触。对应周边部363形成延伸基部32的下表面和下表面部361的倾斜表面。对应周边部363具有从基部32的下表面朝向下表面部361上升的斜面。对应周边部363设置成围绕下表面部361。
165.该对模块安装部36包括插入该对主体安装部43之间的空间中的一对锁定表面363a。在任一个模块安装部36的对应周边部363中,该对锁定表面363a设置在靠近另一个相邻的模块安装部36的区域中。锁定表面363a设置在与对应周边部363中的中心垂直平面po相对相邻的区域中。锁定表面363a形成对应周边部363的一部分。
166.模块安装部36具有主接头65的至少一部分暴露于其的接头孔364。接头孔364形成在下表面部361处。主接头65可以在穿过接头孔364的同时设置。主接头65与从动接头415联接,以将拖把驱动部(未示出)的驱动力传递到旋转拖把41。
167.在模块安装部36和主体安装部43中的任一者的表面上设置有突出的锁定部分915和365,并且在模块安装部36和主体安装部43中的另一者的表面上设置有凹陷以在联接状态下与锁定部分915和365接合的对应锁定部分435和436。
168.主体安装部43包括形成上表面的上表面部431。上表面部431在联接状态下与模块安装部36的下表面部351接触。上表面部431朝向上侧定向。上表面部431可以形成为水平的。上表面部431设置在周边部433的上侧处。
169.主体安装部43具有沿着上表面部431的圆周设置的周边部433。在联接状态下,周边部433与模块安装部36的对应周边部363接触。周边部433形成延伸模块壳体42的上表面和上表面部431的倾斜表面。周边部433具有从模块壳体42的上表面朝向上表面部431上升
的斜面。周边部433设置成围绕上表面部431。
170.主体安装部43具有在联接状态下与锁定表面363a接触的对应锁定表面433a。该对主体安装部43具有一对对应锁定表面433a。该对对应锁定表面433a设置成在左侧和右侧对角地面向彼此。该对对应锁定表面433a设置在该对主体安装部43之间。在任一个主体安装部43的周边部433中,对应锁定表面433a设置在靠近另一个相邻的主体安装部43的区域中。对应锁定表面433a设置在与周边部433中的中心垂直平面po相对相邻的区域中。对应锁定表面433a形成周边部433的一部分。
171.主体安装部43具有驱动孔434,从动接头415的至少一部分暴露于该驱动孔。驱动孔434形成在上表面部431处。在联接状态下,主接头65可插入驱动孔434中以联接到从动接头415。
172.对应锁定部分435和436可以是形成在主体安装部43的表面处的孔或凹槽。对应锁定部分435和436可以设置在周边部433处。可以设置多个对应锁定部分435和436,该多个对应锁定部分435和436对应于锁定部分915和365。
173.对应锁定部分435和436包括第一对应锁定部分435,第一锁定部分915被锁定在其中。第一对应锁定部分435形成在对应锁定表面433a处。
174.对应锁定部分435和436包括第二对应锁定部分436,第二锁定部分365被锁定在其中。第二对应锁定部分436形成在周边部433处。
175.拖把模块40包括至少一个旋转拖把41。该至少一个旋转拖把41可以包括一对旋转拖把41。该对旋转拖把41可以相对于虚拟的中心垂直平面彼此对称。左旋转拖把41a和右旋转拖把41b设置成彼此两侧对称。
176.左旋转拖把41a的下表面和右旋转拖把41b的下表面是倾斜的。左旋转拖把41a的整个下表面向左向下倾斜。右旋转拖把41b的整个下表面向右向下倾斜。左旋转拖把41a的下表面在左侧具有最低点。左旋转拖把41a的下表面在右侧具有最高点。右旋转拖把41b的下表面在右侧具有最低点。右旋转拖把41b的下表面在左侧具有最高点。
177.机器人清洁器1通过与地面的摩擦力而移动,该摩擦力由拖把模块40产生。
178.拖把模块40可以产生用于使主体30向前移动的“向前移动摩擦力”,或者用于使主体30向后移动的“向后移动摩擦力”。拖把模块40可以产生用于使主体30向左转向的“向左力矩摩擦力”,或者用于使主体30向右转向的“向右力矩摩擦力”。拖把模块40可以通过将向前移动摩擦力和向后移动摩擦力中的任一者与向左力矩摩擦力和向右力矩摩擦力中的任一者结合而产生摩擦力。
179.为了使拖把模块40产生向前移动摩擦力,左旋转拖把41a以预定rpm r1在第一向前方向w1f上旋转,右旋转拖把41b以预定rpm r1在第二向前方向w2f上旋转。
180.为了使拖把模块40产生向后移动摩擦力,左旋转拖把41a以预定rpm r2在第一反向方向w1r上旋转,右旋转拖把41b以预定rpm r2在第二反向方向w2f上旋转。
181.旋转拖把41包括在与主接头65接合的同时旋转的从动接头415。主接头65暴露在主体30的外部。从动接头415的至少一部分暴露在拖把模块40的外部。
182.在分离状态下,主接头65和从动接头415彼此分离;在联接状态下,主接头65和从动接头415彼此接合。
183.主接头65和从动接头415中的任一者具有相对于任一者的旋转轴线在周向方向上
设置的多个驱动突起65a,并且其中的另一者具有相对于另一者的旋转轴线在周向方向上设置的多个驱动凹槽415h。
184.多个驱动突起65a以预定间隔彼此间隔开。多个驱动凹槽415h以预定间隔彼此间隔开。在联接状态下,驱动突起65a插入驱动凹槽415h中。在分离状态下,驱动突起65a与驱动凹槽415h分离。
185.主接头65和从动接头415中的任一者具有相对于任一者的旋转轴线在周向方向上彼此间隔开的多个驱动突起65a,并且其中的另一者具有相对于另一者的旋转轴线在周向方向上彼此间隔开的多个对向突起415a。多个对向突起415a在其任一者的方向上突出。
186.多个对向突起415a以预定间隔彼此间隔开。在联接状态下,驱动突起65a中的任一个设置在两个相邻的对向突起415a之间。在分离状态下,驱动突起65a与两个相邻的对向突起415a分离。在联接状态下,对向突起415a中的至少一个设置在两个相邻的驱动突起65a之间。根据本公开的实施方式,在联接状态下,两个对向突起415a设置在两个相邻的驱动突起65a之间。
187.对向突起415a的突出端形成为圆形的。对向突起415a的突出端形成为在多个对向突起415a的布置方向上是圆形的。对向突起415a的突出端具有圆角,该圆角相对于突出方向的中心轴线在相邻的对向突起415a的方向上是圆形的。以这种方式,当分离状态改变为联接状态时,驱动突起65a可以沿着对向突起415a的圆形突出端平稳地移动,以插入到驱动凹槽415h中。
188.在该实施方式中,主接头65具有驱动突起65a,并且从动接头415具有驱动凹槽415h。在本实施方式中,从动接头415包括对向突起415a。将基于该实施方式给出以下描述。
189.从动接头415固定到旋转轴414的上端。从动接头415具有固定到旋转轴的从动轴415b。从动接头415具有从从动轴415b突出的对向突起415。对向突起415从从动轴415b在上下方向上朝向主接头65突出。
190.模块壳体42连接该对旋转拖把41a和41b。通过模块壳体42,该对旋转拖把41a和41b可一起与主体30分离,并可一起连接到主体30。主体安装部43设置在模块壳体42的上侧处。旋转拖把41可由模块壳体42以可旋转的方式支撑。旋转拖把41可设置成穿过模块壳体42。
191.模块壳体42可以具有形成上部的上盖421和形成下部的下盖423。上盖421和下盖423彼此连接。上盖421和下盖423形成部分地容纳旋转拖把41的内部空间。
192.悬架单元47、48和49可设置在模块壳体42处。悬架单元47、48和49可设置在由上盖421和下盖423形成的内部空间中。悬架单元47、48和49以允许旋转轴414在预定范围内可在上下方向上移动的方式支撑旋转轴414。在本实施方式中,悬架单元47、48、49具有倾斜框架47、倾斜轴48、以及弹性构件49。
193.模块壳体42可以具有用于限制倾斜框架47的旋转范围的限制部。
194.该限制部可以包括用于限制倾斜框架47的向下旋转范围的下限制部427。下限制部427可以设置在模块壳体42处。一旦倾斜框架47向下旋转到最大,下限制部427与下限制部接触部477接触。当机器人清洁器1正常地设置在外部水平平面上时,下限制部接触部477与下限制部427间隔开。由于没有力向上推动旋转拖把41的下表面,倾斜框架47旋转到最大角,下限制部接触部477与下限制部427接触,并且倾斜角最大。
195.该限制部可以包括用于限制倾斜框架47的向上旋转范围的上限制部(未示出)。在该实施方式中,当主接头65压靠从动接头415时,倾斜框架47的向上旋转范围可以被限制。当机器人清洁器1正常地设置在外部水平平面上时,主接头65最大程度地压靠从动接头41,并且倾斜角最小。
196.模块壳体42具有用于固定弹性构件49的端部的第二支撑件425。当倾斜框架47旋转时,弹性构件49通过固定到模块壳体42的第二支撑件425弹性变形或弹性恢复。
197.模块壳体42具有用于支撑倾斜轴48的倾斜轴支撑件426。倾斜轴支撑件426支撑倾斜轴48的两端。
198.拖把模块40包括用于在上述联接状态下将从水箱200引入的水引导到旋转拖把41的模块供水部44。模块供水部44将水从顶部引导到底部。可设置对应于该对旋转拖把41a和41b的一对模块供水部44。
199.模块供水部44可以包括用于从水箱200接收水的对应供水部441。对应供水部441连接到供水连接部87。对应供水部441具有凹槽,供水连接部87插入该凹槽中。对应供水部441设置在主体安装部43处。对应供水部441设置在主体安装部43的上表面部431处。对应供水部441形成在主体安装部43的向下凹陷的表面处。
200.模块供水部44具有用于将引入到对应供水部441中的水引导到供水引导部445的水输送部443。该水输送部443可设置在模块壳体42处。该水输送部443可从上盖421的上内表面向下突出。水输送部443可设置在对应供水部441的下方。水输送部443可设置成允许水落下。对应供水部441和水输送部443可具有彼此竖直连通的孔,并且水通过孔落下。
201.模块供水部44包括用于将引入到对应供水部441中的水引导到旋转拖把41的供水引导部445。引入到对应供水部441中的水通过水输送部443流入供水引导部445中。
202.供水引导部445设置在倾斜框架47处。供水引导部445固定到框架基部471。水通过对应供水部441和水输送部443流入由供水引导部445形成的空间中。通过使水的溅射最小化,供水引导部445可引导所有的水流入水接收部413中。
203.供水引导部445可以包括形成从顶部向底部凹陷的空间的流入部445a。流入部445a可容纳水输送部443的下端部。流入部445a可以形成具有敞开上侧的空间。穿过水输送部443的水流入穿过流入部445a的空间的上部开口。流入部445a的空间的一侧连接到形成流动路径部445b所在的流动路径。
204.供水引导部445可以具有连接流入部445a和排放部445c的流动路径部445b。流动路径部445b的一端连接到流入部445a,流动路径部445b的另一端连接到排放部445c。由流动路径部445b形成的空间用作水通道。流动路径部445b的空间连接到流入部445a的空间。流动路径部445可以形成为具有敞开的上侧的通路。流动路径部445b可以具有从流入部445a朝向排放部445c减小的斜面。
205.供水引导部445可具有用于将水排放到水接收部413的供水空间sw中的排放部445c。排放部445c的下端可以设置在供水空间sw中。排放部445c具有连接到模块壳体42的内部空间中的旋转板412的上部空间的孔。排放部445c的孔竖直地连接这两个空间。排放部445c具有竖直地穿过倾斜框架47的孔。流动路径部445b的空间连接到排放部445c的孔。排放部445c的下端可以设置在水接收部413的供水空间sw中。
206.倾斜框架47经由倾斜轴48连接到模块壳体42。倾斜框架47以可旋转的方式支撑旋
转轴414。
207.倾斜框架47适于能在预定范围内绕倾斜旋转轴线ota和otb旋转。倾斜旋转轴线ota和otb在与旋转轴414的旋转轴线osa和osb交叉的方向上延伸。倾斜轴48设置在倾斜旋转轴线ota和otb上。左倾斜框架47可在预定范围内绕倾斜旋转轴线ota旋转;并且右倾斜框架47可在预定范围内绕倾斜旋转轴线otb旋转。
208.倾斜框架47可以相对于拖把模块40在预定的角度范围内倾斜。倾斜框架47可以允许根据地板状况改变倾斜角度。倾斜框架47可以用作旋转拖把41的悬架(同时支撑重量和减轻竖直振动)。
209.倾斜框架47具有形成其下表面的框架基部471。旋转轴414设置成竖直地穿过框架基部471。框架基部471可以形成为具有竖直厚度的板形状。倾斜轴48以可旋转的方式连接模块壳体42和框架基部471。
210.轴承ba可以设置在旋转轴支撑件473和旋转轴414之间。轴承ba可以包括设置在下侧处的第一轴承b1和设置在上侧处的第二轴承b2。
211.旋转轴支撑件473的下端插入到水接收部413的供水空间sw中。旋转轴支撑件473的内周表面支撑旋转轴414。
212.倾斜框架47包括支撑弹性构件49的一端的第一支撑件475。弹性构件49的另一端由设置在模块壳体42处的第二支撑件42支撑。当倾斜框架47相对于倾斜轴48倾斜时,第一支撑件475的位置改变,弹性构件49的长度改变。
213.第一支撑件475固定到倾斜框架47。第一支撑件475设置在左倾斜框架47的左侧。第一支撑件475设置在右倾斜框架47的右侧。第二支撑件425设置在左旋转拖把41a的左区域中。第二支撑件425设置在右旋转拖把41b的右区域中。
214.第一支撑件475固定到倾斜框架47。当倾斜框架47倾斜时,第一支撑件475与倾斜框架47一起倾斜。在最小倾斜角处,第一支撑件475和第二支撑件425之间的距离最小;在最大倾斜角处,第一支撑件475和第二支撑件425之间的距离最大。在最小倾斜角处,弹性构件49弹性变形以提供恢复力。
215.倾斜框架47具有设置成与下限制部427接触的下限制部接触部477。下限制部接触部477的下表面可以与下限制部427的上表面接触。
216.倾斜轴48设置在模块壳体42处。倾斜轴48用作倾斜框架47的旋转轴线。倾斜轴48可以在垂直于旋转拖把41的倾斜方向的方向上延伸。在本实施方式中,倾斜轴48可以设置成在水平方向上延伸。在本实施方式中,倾斜轴48沿在前后方向上以锐角倾斜的方向延伸。
217.弹性构件49将弹性力施加到倾斜框架47,使得旋转拖把41的下表面相对于水平面的倾斜角增加。
218.当倾斜框架47向下旋转时,弹性构件49膨胀,当倾斜框架47向上旋转时,弹性构件49收缩。弹性构件49允许倾斜框架47以减震方式(弹性地)起作用。弹性构件49在倾斜角增加的方向上将力矩施加到倾斜框架47。
219.旋转拖把41具有设置成在主体30的下侧处旋转的旋转板412。旋转板412可以是以旋转轴414为中心的圆板形构件。地板布411固定到旋转板412的下表面。旋转板412使地板布411旋转。旋转轴414固定到旋转板412的中心。
220.旋转板412包括与左旋转板412间隔开的右旋转板412。左旋转板412的下表面形成
向左和向前倾斜的向下的斜面,并且右旋转板412的下表面形成向右和向前倾斜的向下的斜面。
221.旋转板412具有用于固定地板布411的地板布固定部412c。地板布固定部412c可以以可拆卸的方式固定地板布411。地板布固定部412c可以是设置在旋转板412的下表面处的维可牢尼龙搭扣(velcro)等。地板布固定部412c可以是设置在旋转板412的边缘处的钩。
222.设置竖直地穿透旋转板412的供水孔412a。供水孔412a连接供水空间sw和旋转板412的下侧。供水空间sw中的水通过供水孔412a流到旋转板412的下侧。供水空间sw中的水通过供水孔412a流到地板布411。供水孔412a设置在旋转板412的中心处。供水孔412a设置在除旋转轴414的位置之外的位置处。具体地,供水孔412a设置在供水孔412在竖直方向上不与旋转轴414重叠的位置处。
223.旋转板412可以具有多个供水孔412。在多个供水孔412a之间设置有连接部412b。连接部412b连接旋转板412的在离心方向xo上的部分和旋转板412的在离心方向的相反方向xi上的部分。这里,离心方向xo指的是远离旋转轴414移动的方向,离心方向的相反方向xi指的是朝向旋转轴414移动的方向。
224.多个供水孔412a可沿着旋转轴414的周向方向彼此间隔开。多个供水孔412可以以预定间隔彼此间隔开。多个连接部412b可沿着旋转轴414的周向方向彼此间隔开。供水孔412a设置在多个连接部412b之间。
225.旋转板412包括设置在旋转轴414的下端部处的斜面412d。供水空间s2中的水通过重力沿着斜面412d向下流动。斜面412d沿着旋转轴414的下端的圆周形成。斜面412d在离心方向的相反方向xi上向下倾斜。斜面412d可以形成供水孔412a的下表面。
226.旋转拖把41的地板布411连接到旋转板412的下侧,以与地板接触。地板布411可以以可替换的方式安装在旋转板412处。地板布411可以使用维可牢尼龙搭扣、钩等以可拆卸的方式固定到旋转板412。地板布411可以单独提供或与间隔件(未示出)组合提供。地板布411是用于在与地板直接接触的同时擦拭地板的部分。
227.旋转拖把41具有用于使旋转板412旋转的旋转轴414。旋转轴414固定到旋转板412,以将拖把驱动部60的扭矩传递到旋转板412。旋转轴414连接到旋转板412的上侧。旋转轴414设置在旋转板412的上侧的中心处。旋转轴414固定到旋转板412的旋转中心osa和osb(旋转轴)。旋转轴414具有用于固定从动接头415的接头固定部414a。接头固定部414设置在旋转轴414的上端处。
228.拖把模块40具有设置在旋转板412的上侧处以接收水的水接收部413。水接收部413形成供水空间sw,水被接收在该供水空间中。水接收部413通过围绕旋转轴414的圆周同时与其间隔开而形成供水空间sw。水接收部413收集供水空间sw中的水,直到供应到旋转板412的上侧的水穿过供水孔412。供水空间sw设置在旋转板412的上侧的中心处。供水空间sw整体上具有圆柱形容积。供水空间sw具有敞开的上侧。水通过供水空间sw的上侧被引入到供水空间sw中。
229.水接收部413从旋转板412向上突出。水接收部413在旋转轴414的周向方向上延伸。水接收部413可以是环形肋。供水孔412a设置在水接收部413的内下表面处。水接收部413与旋转轴414间隔开。
230.水接收部413的下端固定到旋转板412。水接收部413的上端具有自由端463。
231.虽然已经参照本公开的优选实施方式示出和描述了本公开,但是应当理解,本公开不限于上述具体实施方式,并且本领域技术人员可以在不脱离由所附权利要求限定的本发明的范围和精神的情况下进行各种修改和变化,并且不应当独立于本公开的技术思想或前景来解释修改的实现方式。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1