地板清洁器的制作方法
地板清洁器
背景技术:
1.本文所述的实施例涉及地板清洁器,比如真空清洁器和吸尘器。
技术实现要素:
2.典型地,当地板清洁器开启时,抽吸马达以单一电压或功率操作。例如,用电池供电的地板清洁器通常从联接到地板清洁器的电池组汲取能量。然而,电池组具有不同容量。从具有大容量的电池组汲取高功率水平是有用的,但是从小容量电池组汲取相同的高功率水平可能迅速耗尽电池,从而导致电池组频繁充电。希望地板清洁器包括控制器,该控制器可以确定电池组的电压水平,并调整操作以适应电池组的电压水平。
3.附加地,地板清洁器通常用于清洁各种表面。然而,这些表面变化很大,从而需要各种地板清洁操作。例如,用户可能针对大地毯而需要大吸力、高转速设置,而针对小地毯需要小吸力、低转速。因此,需要一种具有抽吸控制、旋转控制以及在一些情况下流体控制的地板清洁器,该地板清洁器能够基于用户偏好进行控制。
4.另外,不管地板清洁器是向前还是向后移动,或者地板清洁器是否不再接触表面,地板清洁器通常都以相同方式操作。为了节省功耗,希望检测地板清洁器的运动和状态,并基于地板清洁器的运动和状态来控制地板清洁器的操作。
5.最后,地板清洁器通常具有均包括独立控制电路系统的至少两个印刷电路板(pcb)。例如,地板清洁器包括用于控制抽吸马达的第一pcb以及用于控制地板清洁器的其他方面(例如,指示器、传感器等)的第二pcb。需要将pcb集成到控制地板清洁器的所有操作的单一pcb上。
6.本文所述的一个实施例提供了一种操作清洁系统的方法。该方法包括:接纳包括第一电池控制器的第一电池组;从第一电池控制器接收指示第一电池容量的第一信号;响应于接收到第一信号,输出第一控制信号;基于第一控制信号以第一预定恒定功率操作马达;接纳包括第二电池控制器的第二电池组;从第二电池控制器接收指示第二电池容量的第二信号;响应于接收到第二信号,输出第二控制信号;以及基于第二控制信号以第二预定恒定功率操作马达。
7.本文所述的一个实施例提供了一种清洁器。该清洁器包括抽吸马达、控制系统和用户界面。该抽吸马达可操作用于产生从抽吸入口到排放出口的抽吸气流。控制系统被配置为控制能以对应于多个用户可选择模式的预定吸力水平下操作的抽吸马达。用户界面操作性地连接到控制系统,并且具有第一用户可致动输入和第二用户可致动输入。第一用户可致动输入被配置为从该多个用户可选择模式选择和操作控制系统。该多个用户可选择模式中的一个是偏爱模式。第二用户可致动输入被配置为在偏爱模式下操作控制系统。
8.本文所述的一个实施例提供了一种清洁器。清洁器包括壳体、抽吸马达、传感器和控制系统。壳体包括可沿着要清洁的表面移动的基座部分。抽吸马达在壳体内,并且可操作用于产生从抽吸入口到排放出口的抽吸气流。传感器在壳体内,并且可操作用于生成传感器信号。传感器信号是对应于清洁器沿着表面沿向前方向移动的第一信号以及对应于清洁
器沿着表面沿向后方向移动的第二信号。控制系统被配置为接收传感器信号并基于所接收的传感器信号控制抽吸马达的操作。
9.本文所述的一个实施例提供了一种清洁器。清洁器包括抽吸马达和控制系统。该抽吸马达可操作用于产生从抽吸入口到排放出口的抽吸气流。控制系统被配置为控制清洁器和抽吸马达的操作。控制系统包括马达控制电路和清洁器控制电路,该马达控制电路可操作用于控制抽吸马达的平均电压和抽吸马达的功率中的至少一个,并且清洁器控制电路可操作用于控制清洁器的操作。马达控制电路和清洁器控制电路设置在第一电路板上。
10.在详细解释任何实施例之前,应该理解的是,实施例并不将其应用限制于以下说明中阐述的或在以下附图中展示的配置细节和部件布置。实施例能够以多种不同的方法来实践或实施。还应理解的是,本文使用的措辞和术语仅仅是出于说明的目的,而不应视为限制性的。在此使用的“包括”、“包括”或“具有”及其变型在此意指涵盖了下文列出的项及其等同物、以及额外的项。除非另有说明或限制,否则术语“安装”、“连接”、“支撑”和“联接”及其变型被广泛使用,并且涵盖直接和间接安装、连接、支撑和联接。
11.另外,应该理解的是,实施例可以包括硬件、软件和电子部件或模块,为了讨论的目的,这些部件或模块可以被展示和描述为好像大多数部件仅在硬件中实现。然而,本领域的普通技术人员基于对这个详细描述的阅读将认识到,在至少一个实施例中,基于电子的方面可以在可由一个或多个处理单元(比如,微处理器和/或专用集成电路(“asic”))执行的软件(例如,存储在非暂态计算机可读介质上)中实现。这样,应当注意的是,可以利用多个基于硬件和软件的设备以及多个不同的结构部件来实现实施例。例如,说明书中描述的“服务器”、“计算装置”、“控制器”、“处理器”等可以包括一个或多个处理单元、一个或多个计算机可读介质模块、一个或多个输入/输出接口以及连接部件的各种连接件(例如,系统总线)。
12.结合量或条件描述的相对术语,比如“约”、“大约”、“基本上”等,将被本领域普通技术人员理解为包含所述的值并且具有由上下文所规定的含义(例如,术语至少包括与同测量精度、公差[例如,制造、组装、使用等]相关联的特定值相关联的误差程度等)。这样的术语还应被视为披露了由两个端点的绝对值定义的范围。例如,表述“约2到约4”也披露了范围“2到4”。相对术语可以指加减所指示的值的某个百分比(例如,1%、5%、10%或更多)。
[0013]
应当理解,虽然某些附图展示了位于特定装置内的硬件和软件,但是这些描绘仅用于说明的目的。本文中描述为由一个部件执行的功能可以由多个部件以分布式方式执行。同样,由多个部件执行的功能可以由单一部件合并和执行。在一些实施例中,所展示的部件可以被组合或划分成单独的软件、固件和/或硬件。例如,逻辑和处理可以分布在多个电子处理器之间,而不是位于单一电子处理器中并由其执行。无论硬件和软件部件如何组合或划分,它们都可以位于同一计算装置上,或者可以分布在通过一个或多个网络或其他合适的通信链路连接的不同计算装置之间。类似地,被描述为执行特定功能的部件也可以执行本文未述的附加功能。例如,以某种方式“配置”的装置或结构至少以该方式被配置,但是也可以以未明确列出的方式被配置。
[0014]
通过考虑详细说明和附图,本实施例的其他方面将变得清楚。
附图说明
[0015]
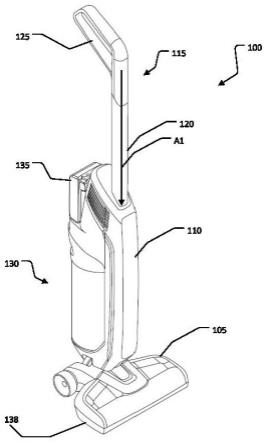
图1是根据本发明的实施例的真空清洁器的立体图。
[0016]
图2是图1的真空清洁器的一部分的截面图。
[0017]
图3是根据本发明的实施例的吸尘器的立体图。
[0018]
图4是图3的吸尘器的立体图。
[0019]
图5是图1的真空清洁器和图3的吸尘器的控制系统的框图。
[0020]
图6至图7是根据本发明的实施例的方法的框图。
[0021]
图8是根据本发明的实施例的方法的框图。
[0022]
图9是根据本发明的实施例的方法的框图。
[0023]
图10是根据本发明的实施例的方法的框图。
[0024]
图11是根据本发明的实施例的方法的框图。
具体实施方式
[0025]
图1展示了根据一个实施例的地板清洁器100。在所展示的实施例中,地板清洁器是真空清洁器100,该真空清洁器包括基座105、枢转地联接到基座105的本体110、以及手柄115。本体110相对于基座105枢转。真空清洁器100进一步包括由本体110支撑的分离器组件130。真空清洁器100从安装到由本体110支撑的电池插座150(图2)的电池135接收电力。电池135可以是可再充电的锂离子电池。所图示的真空清洁器100是立式真空清洁器。然而,在其他实施例中,真空清洁器100可以包括其他形状因数(例如,手持式、罐式等)。
[0026]
图2是真空清洁器100的一部分的截面图。基座105可在要清洁的表面上移动。在所展示的实施例中,基座105包括轮子142,以有助于在表面上移动基座105。基座105包括抽吸入口140。在一些实施例中,清洁器100包括邻近于抽吸入口140的刷辊138(图1)。本体110支撑抽吸源145,该抽吸源可操作用于产生穿过抽吸入口140的气流,以通过穿过抽吸入口140的气流吸取碎屑。抽吸源145包括抽吸马达和风扇。分离器组件130位于抽吸入口140的下游,并将碎屑与气流分离。
[0027]
所展示的电池135可拆卸地联接到电池插座150。在一些实施例中,电池135在大致平行于轴部分120的纵向轴线a1的方向上可滑动地接纳在电池插座150上。当电池135联接到电池插座150时,电池135向真空清洁器100提供电力。例如,电池135可以给抽吸源145的电动马达供电。电池135可以附加地为其他部件供电,比如设置在基座105上的刷辊马达465(图5)。在一些实施例中,电池135是从可以与真空清洁器100和/或其他用电池操作的产品互换使用的多个电池组选择的电池组440。例如,电池组可以是18v 2.0ah电池组、18v 3.0ah电池组和18v 4.0ah电池组中的一种。在其他实施例中,真空清洁器100包括向真空清洁器供应电力(例如,经由壁装插座)的电线。
[0028]
图3展示了根据一个实施例的吸尘器200。在所展示的实施例中,吸尘器200包括基座205和枢转联接到基座205的本体210。本体210相对于基座205围绕第一轴线在直立储存位置(图1)与倾斜操作位置之间枢转。吸尘器200进一步包括供应罐215、回收罐220和真空源。供应罐215被配置为储存清洁流体,并且吸尘器200可操作用于将清洁流体分配到要清洁的表面240上。抽吸源包括抽吸马达和风扇。抽吸马达和风扇可操作用于将清洁流体从表面240吸到回收罐220中。在一些实施例中,吸尘器200包括在基座205内操作刷辊的刷辊马
达。在一些实施例中,刷辊邻近于抽吸入口245。
[0029]
基座205可在要清洁的表面240上移动。在所展示的实施例中,基座205包括轮子235,以有助于在表面240上移动基座205。基座205包括与抽吸源和回收罐220处于流体连通的抽吸入口245。清洁流体从表面240、穿过抽吸入口245被吸到回收罐220中。基座205进一步包括可操作用于将流体分配到表面240的流体分配系统。流体分配系统包括与供应罐215处于流体连通的分配喷嘴。分配喷嘴朝向表面240分配清洁流体。
[0030]
吸尘器200进一步包括手柄225。手柄225包括用于握持手柄225的把手230和邻近于把手230的致动器270。在一些实施例中,致动器270控制清洁流体从供应罐215穿过分配喷嘴的流动。
[0031]
吸尘器200进一步包括向吸尘器200提供电力的电池。电池可以是可再充电的锂离子电池。如上文结合真空清洁器100所论述的,电池可拆卸地联接到电池插座。在一个实施例中,电池是真空清洁器电池135。在一些实施例中,电池向抽吸马达、刷辊马达和流体分配系统以及吸尘器200的其他部件提供电力。
[0032]
图4是根据一个实施例的吸尘器200的立体图。吸尘器200包括用户界面275。在一个实施例中,用户界面275包括电源按钮、模式按钮和“最爱”按钮。在一些实施例中,用户界面275包括附加控制按钮。在一个实施例中,真空清洁器100(图1)包括与用户界面275基本上相同的用户界面。
[0033]
图5是根据一个实施例的控制系统400的框图。控制系统405包括控制器405、抽吸马达控制器410、刷辊马达控制器415、流体分配系统控制器420、传感器425、用户界面430、致动器435和电池组440。不具有流体分配系统470的清洁器、比如真空清洁器100,省略了流体分配系统控制器420。类似地,不具有电动刷辊或搅拌器的清洁器省略了刷辊马达控制器415。控制器405包括处理单元445、存储器450以及输入和输出(i/o)单元455。处理单元445包括微处理器、电子处理器、电子控制器、微控制器或另一合适的可编程装置。存储器450可以是非暂态计算机可读介质并且可以包括程序存储区和数据存储区。程序存储区和数据存储区可以包括不同类型存储器的组合,比如rom、ram(例如,dram、sdram等)、eeprom、闪速存储器或其他合适的磁存储器装置、光存储器装置、物理存储器装置或电子存储器装置。处理单元445连接到存储器450并执行软件指令,该软件指令能够存储在存储器450的ram(例如,在执行期间)、存储器450的rom(例如,在通常永久的基础上)或者比如另一存储器或盘等另一非暂态计算机可读介质中。控制器405被配置成从存储器450检索指令和程序,并根据本文所述的方法执行指令和程序。
[0034]
抽吸马达控制器410连接到控制器405并控制抽吸马达460。抽吸马达控制器410通过改变供应到抽吸马达的功率来改变抽吸马达460的吸力水平。在一些实施例中,抽吸马达控制器410使用脉宽调制(pwm)信号以控制抽吸马达460。例如,抽吸马达控制器410可以使用pwm占空比以维持抽吸马达460的预定平均电压或预定平均功率。
[0035]
刷辊马达控制器415连接到控制器405并控制刷辊马达465。刷辊马达控制器415改变提供到刷辊马达465的功率,以改变由刷辊马达465驱动的刷辊的转速。在一些实施例中,刷辊马达控制器415使用脉宽调制(pwm)信号控制刷辊马达465。
[0036]
流体分配系统控制器420连接到控制器405并控制流体分配系统470。流体分配系统470包括泵和/或阀。流体分配系统控制器420控制流体到要清洁的表面的分配。在一些实
施例中,流体分配系统控制器420致动阀或泵以向地面提供流体。例如,流体分配系统控制器420通过改变提供到泵的功率来改变来自泵的流体分配。在一些实施例中,流体分配系统控制器420控制泵的开关。作为流体分配系统控制器420控制流体分配系统470的另一示例,流体分配系统控制器420可以改变提供到泵的功率,以便改变流体流量,从而提供两个或多个非零流量。在一些实施例中,流体分配系统控制器420通过打开和关闭阀来改变来自阀的流体分配。附加地或替代地,在一些实施例中,阀由流体分配系统控制器420配置,以用于提供两个或更多非零流量。
[0037]
用户界面430连接到控制器405,并与抽吸马达控制器410、刷辊马达控制器415和流体分配系统控制器420通信。在一些实施例中,用户界面430被配置为使用户能够选择使真空清洁器100或抽吸器200以预定的吸力水平和/或刷辊速度操作的操作模式。在一些实施例中,用户界面430包括第一模式选择按钮,该第一模式选择按钮被配置为在每次按压第一模式选择按钮时在操作模式之间切换。例如,用户可以多次按压第一模式选择按钮,直到他们达到他们需要的操作模式为止。
[0038]
控制系统400根据操作模式而操作地板清洁器。例如,地板清洁器可以是真空清洁器100或吸尘器200。在一些实施例中,操作模式对应于用于操作抽吸马达460的不同功率水平。在一个实施例中,控制系统400包括100 w到300 w的五个预定操作功率水平。在一些实施例中,操作模式对应于从以下选择的模式:大吸力、高转速刷辊;大吸力、低转速刷辊;大吸力、刷辊关闭;中等吸力、高转速刷辊;中等吸力、低转速刷辊;中等吸力、刷辊关闭;小吸力、低转速刷辊;以及小吸力、刷辊关闭。设想到各种其他吸力水平和刷辊速度。
[0039]
在一些实施例中,当抽吸马达460在大吸力操作模式下操作时,抽吸马达控制器410向抽吸马达460提供200 w到300 w的范围内的功率。在一些实施例中,当抽吸马达460在中等吸力操作模式下操作时,抽吸马达控制器410向抽吸马达460提供150 w到200 w的范围内的功率。在一些实施例中,当抽吸马达460在小吸力操作模式下操作时,抽吸马达控制器410向抽吸马达460提供75 w到150 w的范围内的功率。
[0040]
在一些实施例中,当刷辊马达465在高刷辊操作模式下操作时,刷辊马达控制器415操作刷辊马达465以提供大于2500 rpm的刷辊速度。在一些实施例中,当刷辊马达465在中等刷辊操作模式下操作时,刷辊马达控制器415操作刷辊马达465以提供1000 rpm到2500 rpm的范围内的刷辊速度。在一些实施例中,当刷辊马达465在低刷辊操作模式下操作时,刷辊马达控制器415操作刷辊马达465以提供100 rpm到1000 rpm之间的刷辊速度。
[0041]
在一些实施例中,操作模式对应于由地板清洁器清洁的各种表面。例如,地板清洁器可以是真空清洁器100或吸尘器200。在一些实施例中,表面操作模式对应于从以下选择的模式:大地毯模式(例如,大吸力、高转速刷辊)、短绒大地毯模式(例如,大吸力、低转速刷辊)、长绒大地毯模式(例如,中等吸力、低转速刷辊)、表面模式(例如,中等吸力、低转速刷辊)、硬地板模式(例如,高吸力、刷辊脱落)、地板垫模式(例如,中等吸力、刷辊脱落)、小地毯模式(例如,小吸力、低转速刷辊)、精细表面模式(例如,小吸力、刷辊关闭)和软管附件工具模式(例如,大吸力、刷辊关闭)。根据应用的需要,在上述表面操作模式和其他表面操作模式中,可以使用各种其他吸力水平和刷辊速度。
[0042]
在具有流体分配系统470的一些实施例中,操作模式包括各种水平的流体分配。在一些实施例中,操作模式对应于从大流量、中等流量、小流量和流体分配关闭中选择的模
式。在一些实施例中,流体分配可以是除了改变吸力水平和/或刷辊转速之外的。
[0043]
在一些实施例中,当处于大流量操作模式时,流体分配系统控制器420使流体分配系统470以200 ml/min到400 ml/min之间的流体流量操作。在一些实施例中,当处于中等流量操作模式时,流体分配系统控制器420使流体分配系统470以100 ml/min到200 ml/min之间的流体流量操作。在一些实施例中,当处于小流量操作模式时,流体分配系统控制器420使流体分配系统470以50 ml/min到100 ml/min之间的流体流量操作。
[0044]
在一些实施例中,控制器405在地板清洁器关断之前保存地板清洁器正操作的操作模式,并在地板清洁器下次开启时启动所保存的操作模式。
[0045]
在一些实施例中,用户界面430包括“最爱”按钮,该按钮允许用户通过致动“最爱”按钮返回到一个或多个最爱的操作模式和/或功率水平。用户可以快速选择用户界面430上的“最爱”按钮,并且控制系统400将根据编程的操作模式进行操作。在一个实施例中,用户将对应于一次按压“最爱”按钮的第一最爱模式和对应于两次按压“最爱”按钮的第二最爱模式编程。例如,用户可以使用适于清洁硬木地板的第一操作模式和适于清洁精美小地毯的第二操作模式。将“最爱”按钮编程使用户能够高效地在他们最常用的操作模式之间切换。
[0046]
在一些实施例中,用户通过执行预定的设置活动来将“最爱”按钮编程。例如,当清洁器在偏爱模式下操作时,用户可以按住“最爱”按钮一段时间(例如,3秒、5秒等),或者同时按下“最爱”按钮和操作模式按钮,或者按下用户界面430上的按钮的组合或序列。在一些实施例中,当控制系统400确定比其他操作模式使用更长时间的操作模式时,“最爱”按钮被自动编程。例如,控制系统记录清洁器在某持续时间(例如,1个操作小时、2个操作小时或其他期望的操作时间)内在每种模式下操作的时间量。控制系统将持续时间内具有最大累积时间值的模式指派为“最爱”模式。附加地或替代地,当用户已在操作模式下操作地板清洁器某持续时间时,控制系统400可以将该操作模式视为最爱。
[0047]
在一些实施例中,用户界面430不包括专用的“最爱”按钮,并且当用户与操作模式按钮或用户界面430上的其他按钮交互时,控制系统400改变到最爱操作模式。例如,用户执行预定的设置活动以将当前操作模式设置为最爱操作模式。当操作地板清洁器时,用户可以接着双击操作模式按钮或执行另一预定序列以返回到最爱操作模式。
[0048]
在一些实施例中,控制系统400和用户界面430被配置成使用户能够返回到用户操作清洁器的前一模式或“先前模式”。在一些实施例中,用户界面430包括“先前”按钮,用户可以选择该按钮以在上次已知操作模式下操作地板清洁器。控制器405确定当前操作模式并将其存储在存储器450中。当用户改变操作模式并且新的当前操作模式被确定时,前面为当前操作模式的模式变成先前操作模式,并且被指派为当“先前”按钮被致动时被激活。为了避免意外或无意的设置,在一个实施例中,控制系统400在清洁器保持在该模式下操作超过预定的秒数(比如5秒、10秒或其他期望的操作时间)之后,确定当前操作模式。
[0049]
控制系统400使用来自电池组440的电力操作地板清洁器。例如,电池组可以是18v 2.0ah电池组、18v 3.0ah电池组和18v 4.0ah电池组中的一种。控制器405与电池组440的电池管理系统通信,该电池管理系统监控电池单元和电池单元的荷电状态。控制器405基于与电池管理系统的通信来确定电池组440的容量和电池组440的荷电状态。控制器405与抽吸马达控制器410、刷辊马达控制器415和/或流体分配系统控制器420通信,以根据电池组440
的容量和/或电量调整提供给地板清洁器的部件的功率水平。
[0050]
在一些实施例中,控制器405与电池组440的电池管理系统之间的通信包括供控制器405确定电池类型和/或电池的容量的信息。在一些实施例中,电池管理系统计算其荷电状态和输出电压,并将它们传递给控制器405。在一些实施例中,控制器405测量电池组440的输出电压,并基于电池类型和/或电池的容量而计算荷电状态。
[0051]
在一些实施例中,控制器405使用电池组440的输出电压作为电池组440的电量的指示器,并基于电池组440的电压而操作地板清洁器。控制器405可以基于电池组440的电压来控制电池组440的功率输出水平。功率输出水平的调整是通过pwm占空比进行的。
[0052]
在一些实施例中,电池组440可以限定充电电压和截止电压。截止电压是预定电压,在该预定电压时,电池组440停止向控制系统400输送电力,因为电池单元耗尽。充电电压是电池组440被认为充电的电压。对于一个示例18 v电池组,充电电压是约20伏,并且截止电压是13.5伏。
[0053]
控制器405被配置为基于电池组440的电压而向控制系统400的各种部件提供电力。控制器405与抽吸马达控制器410通信,以向抽吸马达460提供电力。在一些实施例中,抽吸马达控制器410使用pwm占空比以维持抽吸马达460的预定平均电压。在另一个实施例中,抽吸马达控制器410还使用穿过抽吸马达460的测量电流并使用pwm占空比以维持抽吸马达460的预定功率。更具体地,抽吸马达控制器410使用pwm占空比以将电池组440的电压限制为平均电压,并将测量的电流和平均电压相乘来计算有效功率水平。抽吸马达控制器410持续计算和监控有效功率水平,并调整pwm占空比以调整平均电压,以维持预定的有效功率水平。为了维持功率,抽吸马达控制器410基于经由控制器405传递给抽吸马达控制器410的电池电压和从抽吸马达控制器410内的采样电路感测到的抽吸马达460的测量电流信号,使用比例积分微分控制器(pid控制)。
[0054]
在一些实施例中,控制器405可以降低从电池组440汲取的功率水平,以便延长具有较小容量的电池组的运行时间。具体地,对于具有较大容量的电池组,控制器405可以以较高的功率水平操作抽吸马达460,并且对于具有较小容量的电池组,以降低的功率操作抽吸马达460,以延长较小容量电池组的运行时间。例如,对于4.0 ah的电池组,控制器405可以以较高的功率水平抽吸马达460上,而对于2.0 ah和3.0 ah的电池组,控制器可以以较低功率输出来操作抽吸马达。
[0055]
在一些实施例中,当地板清洁器通过与电池管理系统通信而开启时,控制器405确定电池组440的电池容量。抽吸马达控制器410使用pwm占空比操作抽吸马达460,以维持抽吸马达460的预定有效功率水平。pwm占空比可以根据电池组440的容量来选择。例如,对于2.0 ah电池组,抽吸马达460的功率水平将设置为260 w,对于3.0 ah电池组,设置为280 w,并且对于4.0 ah电池组,设置为300 w。在另一个示例中,对于2.0 ah电池组,抽吸马达460的功率水平将设置为150 w,对于3.0 ah电池组,设置为200 w并且对于4.0 ah电池组,设置为250 w。考虑到耗尽电池组的运行时间、清洁器的预期使用环境、预期的用户期望以及在各种功率水平时的清洁器性能,预定的功率水平被设置为适合于该应用和该应用可用的电池组。
[0056]
抽吸马达控制器410监控施加到抽吸马达460的电池组440电压和穿过抽吸马达460的电流,并调整占空比以维持有效功率水平。当电池组440的电压下降到维持预定功率
水平(恒定功率阈值)所需的电压时,pwm占空比达到100%。当电池组电压下降到恒定功率阈值时,抽吸马达控制器410以100%占空比操作抽吸马达460,直到电池组440电压下降到预定截止电压。当电池组达到截止电压时,电池管理系统和控制器405中的一个或两个停止供电以关断地板清洁器。
[0057]
控制器405可以基于地板清洁器的操作状态而控制地板清洁器的操作。例如,控制器405可以确定地板清洁器是否沿向前方向、向后方向操作,和/或地板清洁器是否已被提升脱离正被清洁的表面。清洁通常在向前方向与向后方向两者上都有效。然而,沿向前方向操作地板清洁器可以产生比向后方向高的效率。进一步,当地板清洁器被提升到正被清洁的表面上方时,地板清洁器可能效率较低。为了节省功耗,控制器405可以检测地板清洁器的运动和状态,并基于地板清洁器的运动和状态来控制地板清洁器的操作。
[0058]
在一些实施例中,控制器405基于来自传感器425中的至少一个的传感器数据而确定清洁器何时处于向前移动或行程中,以及清洁器何时处于向后移动或行程中。检测可以基于刷辊马达465和/或抽吸马达460的感测电流,和/或与地板或其他要清洁的表面接触的地板清洁器上的轮子的旋转方向。在一些实施例中,控制器405监控刷辊马达465的电流,以确定单元何时向前和向后移动。在许多表面上,当清洁器向后移动时,刷辊马达465上的负载增加。控制器405将刷辊马达电流的增大与向后移动相关,并针对向后移动控制地板清洁器的操作。当刷辊马达电流在向前行程时减小时,控制器405将刷辊马达电流的减小与向前移动相关联,并针对向前移动控制地板清洁器的操作。
[0059]
在一些实施例中,传感器425中的传感器设置在地板清洁器上,以监控与表面接触的一个或多个轮子的旋转。例如,磁体设置在轮子上,并且一个或多个霍尔效应传感器设置在地板清洁器上。控制器405监控传感器以确定地板清洁器何时向前和向后移动。
[0060]
控制器405被配置为经由抽吸马达控制器410操作性地向抽吸马达460提供电力。抽吸马达控制器410基于清洁器是向前运动还是向后运动来增大和减小抽吸马达460的功率。在一个实施例中,抽吸马达控制器410针对向前移动而向抽吸马达460提供高功率,并且针对向后移动而向抽吸马达460提供低功率。例如,抽吸马达控制器410在向前冲程时向抽吸马达460施加200 w到300 w之间的功率,并且在向后冲程时向抽吸马达460施加75 w到150 w之间的功率。
[0061]
在一个实施例中,控制器405监控地板清洁器是否已从地面被提升。在一个实施例中,刷辊马达控制器415监控刷辊马达465的电流,并且控制器405可以基于电流的变化来确定地板清洁器何时从表面被提升。例如,当地板清洁器被提升时,刷辊将在很大程度上不受阻碍地旋转,从而将刷辊马达465的电流减小到最小。控制器405将刷辊马达465的小电流与被提升相关,并针对被提升来控制地板清洁器的操作。在一些实施例中,当地板清洁器被提升时,抽吸马达控制器410降低抽吸马达460的功率。在一些实施例中,当清洁器被提升时,刷辊马达控制器415降低刷辊马达465的功率。
[0062]
在一个实施例中,地板清洁器包括提升传感器,并且控制器405监控提升传感器以确定地板清洁器何时被提升。
[0063]
从以上披露中可以明显看出,控制系统400的部件相互连接和通信。在一些实施例中,对应于控制系统400的部件的物理部件被集成在单一整体印刷电路板(pcb)上。在之前清洁器中,马达控制器设置在与马达相关联的pcb上。例如,用于bldc抽吸马达的现有马达
控制器设置在附带抽吸马达的马达控制板上。在一个当前实施例中,控制器被组合到一个pcb上。例如,抽吸马达控制器410、刷辊马达控制器415和/或流体分配系统控制器420可以与其他控制系统部件组合在单一pcb上。组合式pcb还可以控制刷辊的刷辊马达的电源开/关。
[0064]
图6至图7是根据一些实施例的操作地板清洁器的方法500的框图。地板清洁器可以是真空清洁器100和吸尘器200中的一个。在框505中,地板清洁器将第一电池组接纳在电池插座中。例如,电池组可以是18v 2.0ah电池组、18v 3.0ah电池组和18v 4.0ah电池组中的一种。电池组包括第一电池管理系统(即,第一电池组控制器)。在框510中,控制器405从第一电池组接收指示第一电池组容量的第一信号。在一些实施例中,第一电池组控制器将指示第一电池组容量的第一信号传递给控制器405。在一些实施例中,控制器405从第一电池组或在第一电池组上读取代码或其他信息,并产生指示第一电池组容量的第一信号。在框515中,控制器405响应于接收到第一信号而输出第一控制信号。在一些实施例中,控制器向抽吸马达控制器410、刷辊马达控制器415和流体分配系统控制器420中的至少一个输出第一控制信号。在框520中,控制器405基于第一控制信号以第一预定恒定功率操作马达。例如,抽吸马达控制器410可以基于来自控制器405的第一控制信号而操作抽吸马达460。在一些实施例中,使用pwm信号操作抽吸马达460以维持第一预定功率。例如,第一电池组可以是4.0 ah的电池组,并且第一信号指示4.0 ah容量,并且抽吸马达控制器410可以以300 w的第一预定功率操作抽吸马达460。
[0065]
在框525,地板清洁器将第二电池组接纳在电池插座中。在一些实施例中,第一电池组必须从电池插座被取出,以便地板清洁器接纳第二电池组。在框530,控制器405从第二电池组控制器接收指示第二电池组容量的第二信号。在框535,控制器405响应于从第二电池组接收到第二信号而输出第二控制信号。在框540,控制器405操作马达以维持第二预定恒定功率。例如,抽吸马达控制器410可以基于来自控制器405的第二控制信号而操作抽吸马达460。例如,第二电池组可以是2.0 ah的电池组,并且第二信号指示2.0 ah容量,并且抽吸马达控制器410可以以260 w的第二预定功率操作抽吸马达460。方法500进行到图7的框a。
[0066]
在框545,控制器405从第二电池组控制器接收第三信号。在一些实施例中,第三信号是第二电池组的电压信号。例如,第三信号可以指示第二电池组的电压小于充满电的电压。在框550,控制器405响应于从第二电池组接收到第三信号而输出第三控制信号。在框555,控制器405以100%占空比操作马达。当第三信号指示电池电压处于恒定功率阈值时,抽吸马达控制器410以100%占空比操作抽吸马达460,直到电池组440达到截止电压为止。
[0067]
在框560,控制器405从第二电池组控制器接收第四信号。在一些实施例中,第四信号是第二电池组的电压信号,指示第二电池组的电压处于截止电压。在框565,控制器405响应于从第二电池组接收到第四信号而输出第四控制信号。在框555,控制器405基于第四控制信号而停止马达的操作。在一些实施例中,抽吸马达控制器410基于第二电池组的电压处于截止电压而停止抽吸马达460的操作。
[0068]
图8是根据一些实施例的操作地板清洁器的方法700的框图。地板清洁器可以是真空清洁器100和吸尘器200中的一个。在框705,控制器405接收输入。在一些实施例中,输入来自与控制器405连接并通信的用户界面430。在框710,控制器405确定输入是第一输入还
是第二输入。在一些实施例中,第一输入对应于用户界面430上的第一按钮,并且第二输入对应于用户界面上的第二按钮。在一些实施例中,输入中的一个指示最爱操作模式。如果控制器405确定输入是第一输入,那么方法700前进到框715。在框715,控制器405根据第一输入而操作地板清洁器。如果控制器405确定输入是第二输入,那么方法700前进到框720。在框720,控制器405根据第二输入而操作地板清洁器。在一些实施例中,第一输入和第二输入对应于地板清洁器的操作模式。例如,第一输入可以对应于最爱操作模式。
[0069]
图9是根据一些实施例的操作地板清洁器的方法800的框图。地板清洁器可以是真空清洁器100和吸尘器200中的一个。在框805,控制器405接收传感器信号。在一些实施例中,传感器信号来自地板清洁器内的传感器,该传感器感测地板清洁器是沿向前方向还是沿向后方向移动。在框810,控制器405确定传感器信号是第一信号还是第二信号。在一些实施例中,第一信号对应于向前方向,而第二信号对应于向后方向。如果控制器405确定传感器信号是第一信号,那么方法800前进到框815。在框815,抽吸马达控制器410以第一平均电压和/或第一平均功率操作抽吸马达460。如果控制器405确定传感器信号是第二信号,那么方法800前进到框820。在框820,抽吸马达控制器410以第二平均电压和/或第二平均功率操作抽吸马达460。在一些实施例中,第一平均电压和第一平均功率大于第二平均电压和第二平均功率。
[0070]
图10是根据一些实施例的操作地板清洁器的方法900的框图。地板清洁器可以是真空清洁器100和吸尘器200中的一个。在框905,控制器405接收第一传感器信号和第二传感器信号。在一些实施例中,传感器信号来自地板清洁器内的传感器,该传感器感测刷辊马达465的电流。在一些实施例中,传感器信号来自地板清洁器内的传感器,指示清洁器移动的方向。在框910,控制器405确定第一传感器信号与第二传感器信号之间是否存在差异。如果控制器405确定第一传感器信号与第二传感器信号之间没有差异,那么方法900前进到框915。在框915,控制器405确定地板清洁器正在沿向前方向移动。当地板清洁器沿向前方向移动时,刷辊马达465的电流不变。如果控制器405确定第一传感器信号与第二传感器信号之间存在差异,那么方法900前进到框925。在框920,控制器405确定清洁器正在沿向后方向移动。刷辊马达465的电流随着地板清洁器向后移动而增大,并且控制器405基于电流的变化而确定向后方向。控制器405连续计算传感器信号的差异,以确定地板清洁器移动的方向。
[0071]
图11是根据一些实施例的操作地板清洁器的方法1000的框图。在框1005,控制器405接收提升信号。在一些实施例中,提升信号是从监控刷辊马达465的电流的传感器接收的。当地板清洁器被提升时,刷辊马达465的电流减小到最小。在一些实施例中,传感器信号来自地板清洁器内的传感器,指示清洁器正被提升。在框1010,控制器405确定地板清洁器已从它正清洁的表面被提升。在框1015,控制器405向抽吸马达控制器410和刷辊马达控制器415发送信号,以分别以降低的功率操作抽吸马达460和刷辊马达465。
[0072]
因此,本文所述的实施例尤其提供了控制地板清洁器的系统和方法。在以下的权利要求中阐述了多种不同的特征和优点。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1