一种智能制造生产用堆叠放置装置
1.本发明涉及智能制造技术领域,具体为一种智能制造生产用堆叠放置装置。
背景技术:
2.智能制造源于人工智能的研究,一般认为智能是知识和智力的总和,前者是智能的基础,后者是指获取和运用知识求解的能力,智能制造应当包含智能制造技术和智能制造系统,智能制造系统不仅能够在实践中不断地充实知识库,具有自学习功能,还有搜集与理解环境信息和自身的信息,并进行分析判断和规划自身行为的能力;在产品被制造后,需要堆栈码放,现有的放置结构为固定货架,在放置后,货架的重心会发生偏移,导致货架不稳,在放置过程中,物料的形状不一,存放空间的需求不一,现有的货架不易调整存放空间,不能对空间的充分利用,现有的输送结构,不能随着存放的高度对输送点的调整,输送不便,影响输送效率。
技术实现要素:
3.本发明的目的在于提供一种智能制造生产用堆叠放置装置,解决了货架的重心会发生偏移,导致货架不稳,在放置过程中,物料的形状不一,存放空间的需求不一,现有的货架不易调整存放空间,不能对空间的充分利用的技术问题。
4.本发明的目的可以通过以下技术方案实现:一种智能制造生产用堆叠放置装置,包括:放置架、吊升结构、摆动结构和输送结构,所述放置架的内部设置有吊升结构,所述放置架的底部安装有摆动结构,所述输送结构安装在放置架的一侧。
5.作为本发明进一步的方案:所述摆动结构包括第二支撑板、第一丝杆、第一弹簧、第三支撑板、第一指示灯、第一电极片、定位轴、支撑座、导电杆、摆动环、第二指示灯、输送马达、滑条、第二电极片和配重块,所述第二支撑板的下方设置有第三支撑板,所述第二支撑板的底侧安装有支撑座,所述第三支撑板的顶侧安装有支撑杆,支撑杆的顶端通过销轴配合安装在支撑座内,所述第二支撑板和第三支撑板之间固定有第一弹簧,所述第二支撑板的侧面中心位置安装有定位轴,所述定位轴的外部套装有摆动环,所述摆动环的圆周面上固定有导电杆,所述定位轴的两侧对称安装有第一电极片和第二电极片,所述第二支撑板的侧壁上分别安装有第一指示灯和第二指示灯,所述滑条固定在第二支撑板的底侧,所述输送马达安装在第二支撑板的底侧,所述输送马达的转轴上安装有第一丝杆,所述配重块扣装在滑条上,所述配重块的内部开设有螺孔,所述第一丝杆穿设在螺孔内。
6.作为本发明进一步的方案:所述第一电极片和第二电极片的中心轴线与摆动环的中心轴线在同一直线上。
7.作为本发明进一步的方案:所述导电杆、第二指示灯、第二电极片和输送马达以及输送马达的正向开关串联为第一电路,所述导电杆、第一指示灯、第一电极片和输送马达以及输送马达的反向开关串联为第二电路。
8.作为本发明进一步的方案:所述输送结构包括滑轨、第二丝杆、滑扣、第一传动辊、传动皮带、第二传动辊、第三传动辊、伸缩杆、伸缩筒、第二弹簧和升降马达,所述滑轨固定在放置架的一侧,所述升降马达固定在放置架的底部一侧,所述升降马达的转轴上安装有第二丝杆,所述滑扣扣装在滑轨的一侧,所述滑扣的内部开设有螺孔,所述第二丝杆穿设在螺孔内,所述伸缩筒焊装在第二支撑板的一侧,所述伸缩杆穿插在伸缩筒内,所述伸缩杆的一端与伸缩筒的筒壁之间固接有第二弹簧,所述滑扣侧壁上、伸缩杆的一端上和第一支撑板的顶侧壁上均焊装有辊架,所述第一传动辊、第二传动辊和第三传动辊分别通过辊轴安装在辊架内,所述传动皮带依次套装在第一传动辊、第二传动辊和第三传动辊上。
9.作为本发明进一步的方案:所述吊升结构包括限位杆、升降电机、绞盘、第一支撑板和旋转杆,所述限位杆竖直安装在放置架的内部,所述第一支撑板的内部开设有限位孔,所述限位杆穿设在限位孔内,所述第一支撑板的底侧固定有升降电机,所述升降电机的输出端安装有旋转杆,所述旋转杆上安装有绞盘。
10.作为本发明进一步的方案:所述放置架的内部并列设置有多个第一支撑板,最上端的所述第一支撑板焊装在放置架上,两相邻的第一支撑板通过丝绳吊装。
11.本发明的有益效果:本发明通过滑扣沿滑轨上下滑动,能够改变第一传动辊的高度位置,在第一传动辊位置改变后,传动皮带的长度移动,伸缩杆能够在第二弹簧的配合下在伸缩筒内部滑动,在第二传动辊和第三传动辊的配合下,能够实现传动皮带的正常旋转,能够将货物输送到不同高度位置,能够更好的配合实现对货物的堆栈;通过各个升降电机带动旋转杆旋转,能够实现绞盘的旋转,能够配合实现对两相邻第一支撑板的间距调整,能够根据不同产品的体型调整不同的储存空间,能够合理分配放置空间,能够实现空间利用最大化,避免空间的浪费;在对放置架重心调整时,在导电杆向第二电极片一侧偏移时,导电杆与第二电极片接触,能够实现输送马达的正转,通过第一丝杆旋转,实现对配重块位置的调整,直至导电杆与第二电极片分离,能够停止输送马达转动,同理,在导电杆偏向第一电极片时,输送马达反转,推动配重块移动,实现对第二支撑板重心的调整,能够保证放置架在货物放置后,重心稳定,不会出现倾斜,保证物品保存完整。
附图说明
12.为了便于本领域技术人员理解,下面结合附图对本发明作进一步的说明。
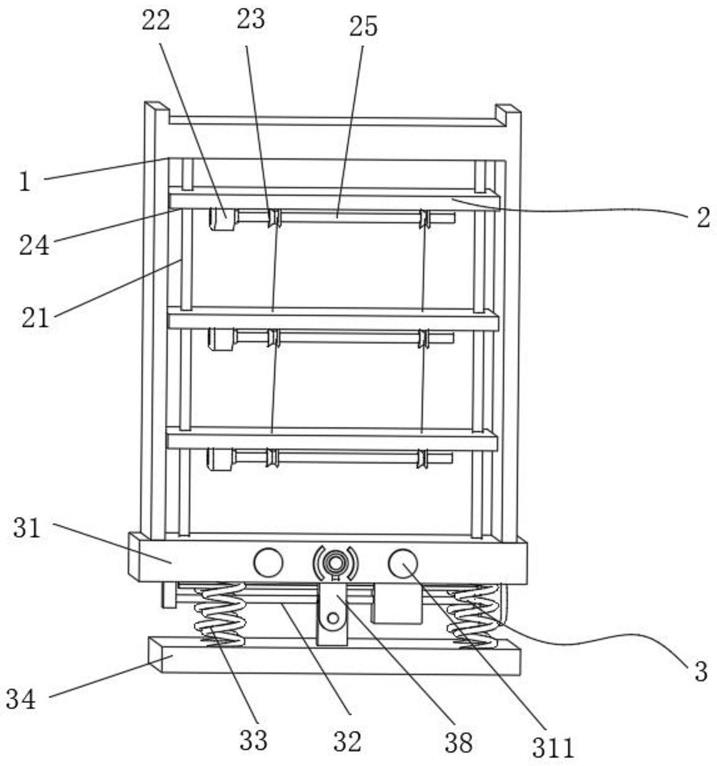
13.图1为一种智能制造生产用堆叠放置装置的主体正视立体结构示意图;图2为一种智能制造生产用堆叠放置装置的主体侧视立体结构示意图;图3为一种智能制造生产用堆叠放置装置的主体仰视立体结构示意图;图4为一种智能制造生产用堆叠放置装置的主体正视平面结构示意图;图5为一种智能制造生产用堆叠放置装置中的输送结构图;图中:1、放置架;2、吊升结构;3、摆动结构;4、输送结构;21、限位杆;22、升降电机;23、绞盘;24、第一支撑板;25、旋转杆;31、第二支撑板;32、第一丝杆;33、第一弹簧;34、第三支撑板;35、第一指示灯;36、第一电极片;37、定位轴;38、支撑座;39、导电杆;310、摆动环;311、第二指示灯;312、输送马达;313、滑条;314、第二电极片;315、配重块;41、滑轨;42、第
二丝杆;43、滑扣;44、第一传动辊;45、传动皮带;46、第二传动辊;47、第三传动辊;48、伸缩杆;49、伸缩筒;410、第二弹簧;411、升降马达。
具体实施方式
14.下面将结合实施例对本发明的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其它实施例,都属于本发明保护的范围。
15.如图1-5所示,一种智能制造生产用堆叠放置装置,包括:放置架1、吊升结构2、摆动结构3和输送结构4,放置架1的内部设置有吊升结构2,放置架1的底部安装有摆动结构3,输送结构4安装在放置架1的一侧。
16.作为本发明的一种实施方式,摆动结构3包括第二支撑板31、第一丝杆32、第一弹簧33、第三支撑板34、第一指示灯35、第一电极片36、定位轴37、支撑座38、导电杆39、摆动环310、第二指示灯311、输送马达312、滑条313、第二电极片314和配重块315,第二支撑板31的下方设置有第三支撑板34,第二支撑板31的底侧安装有支撑座38,第三支撑板34的顶侧安装有支撑杆,支撑杆的顶端通过销轴配合安装在支撑座38内,第二支撑板31和第三支撑板34之间固定有第一弹簧33,第二支撑板31的侧面中心位置安装有定位轴37,定位轴37的外部套装有摆动环310,摆动环310的圆周面上固定有导电杆39,定位轴37的两侧对称安装有第一电极片36和第二电极片314,第二支撑板31的侧壁上分别安装有第一指示灯35和第二指示灯311,滑条313固定在第二支撑板31的底侧,输送马达312安装在第二支撑板31的底侧,输送马达312的转轴上安装有第一丝杆32,配重块315扣装在滑条313上,配重块315的内部开设有螺孔,第一丝杆32穿设在螺孔内。
17.作为本发明的一种实施方式,第一电极片36和第二电极片314的中心轴线与摆动环310的中心轴线在同一直线上,导电杆39、第二指示灯311、第二电极片314和输送马达312以及输送马达312的正向开关串联为第一电路,导电杆39、第一指示灯35、第一电极片36和输送马达312以及输送马达312的反向开关串联为第二电路,工作时,在导电杆39向第二电极片314一侧偏移时,导电杆39与第二电极片314接触,能够实现输送马达312的正转,通过第一丝杆32旋转,实现对配重块315位置的调整,直至导电杆39与第二电极片314分离,能够停止输送马达312转动,同理,在导电杆39偏向第一电极片36时,输送马达312反转,推动配重块315移动,实现对第二支撑板31重心的调整,能够保证放置架1在货物放置后,重心稳定,不会出现倾斜,保证物品保存完整。
18.作为本发明的一种实施方式,输送结构4包括滑轨41、第二丝杆42、滑扣43、第一传动辊44、传动皮带45、第二传动辊46、第三传动辊47、伸缩杆48、伸缩筒49、第二弹簧410和升降马达411,滑轨41固定在放置架1的一侧,升降马达411固定在放置架1的底部一侧,升降马达411的转轴上安装有第二丝杆42,滑扣43扣装在滑轨41的一侧,滑扣43的内部开设有螺孔,第二丝杆42穿设在螺孔内,伸缩筒49焊装在第二支撑板31的一侧,伸缩杆48穿插在伸缩筒49内,伸缩杆48的一端与伸缩筒49的筒壁之间固接有第二弹簧410,滑扣43侧壁上、伸缩杆48的一端上和第二支撑板31的顶侧壁上均焊装有辊架,第一传动辊44、第二传动辊46和第三传动辊47分别通过辊轴安装在辊架内,传动皮带45依次套装在第一传动辊44、第二传
动辊46和第三传动辊47上,工作时,伸缩杆48能够在第二弹簧410的配合下在伸缩筒49内部滑动,在第二传动辊46和第三传动辊47的配合下,能够实现传动皮带45的正常旋转,能够将货物输送到不同高度位置,能够更好的配合实现对货物的堆栈。
19.作为本发明的一种实施方式,吊升结构2包括限位杆21、升降电机22、绞盘23、第一支撑板24和旋转杆25,限位杆21竖直安装在放置架1的内部,第一支撑板24的内部开设有限位孔,限位杆21穿设在限位孔内,第一支撑板24的底侧固定有升降电机22,升降电机22的输出端安装有旋转杆25,旋转杆25上安装有绞盘23,放置架1的内部并列设置有多个第一支撑板24,最上端的第一支撑板24焊装在放置架1上,两相邻的第一支撑板24通过丝绳吊装,工作时,各个升降电机22带动旋转杆25旋转,能够实现绞盘23的旋转,能够配合实现对两相邻第一支撑板24的间距调整,能够根据不同产品的体型调整不同的储存空间,能够合理分配放置空间,能够实现空间利用最大化,避免空间的浪费。
20.本发明的工作原理:在进行货物堆放时,在进行货物输送时,通过升降马达411旋转,实现第二丝杆42的旋转,能够实现滑扣43沿滑轨41上下滑动,能够改变第一传动辊44的高度位置,在第一传动辊44位置改变后,传动皮带45的长度移动,伸缩杆48能够在第二弹簧410的配合下在伸缩筒49内部滑动,在第二传动辊46和第三传动辊47的配合下,能够实现传动皮带45的正常旋转,能够将货物输送到不同高度位置,能够更好的配合实现对货物的堆栈,在堆栈过程中,各个升降电机22带动旋转杆25旋转,能够实现绞盘23的旋转,能够配合实现对两相邻第一支撑板24的间距调整,能够根据不同产品的体型调整不同的储存空间,能够合理分配放置空间,能够实现空间利用最大化,避免空间的浪费,在对放置架1重心调整时,在导电杆39向第二电极片314一侧偏移时,导电杆39与第二电极片314接触,能够实现输送马达312的正转,通过第一丝杆32旋转,实现对配重块315位置的调整,直至导电杆39与第二电极片314分离,能够停止输送马达312转动,同理,在导电杆39偏向第一电极片36时,输送马达312反转,推动配重块315移动,实现对第二支撑板31重心的调整,能够保证放置架1在货物放置后,重心稳定,不会出现倾斜,保证物品保存完整。
21.以上公开的本发明优选实施例只是用于帮助阐述本发明。优选实施例并没有详尽叙述所有的细节,也不限制该发明仅为所述的具体实施方式。显然,根据本说明书的内容,可作很多的修改和变化。本说明书选取并具体描述这些实施例,是为了更好地解释本发明的原理和实际应用,从而使所属技术领域技术人员能很好地理解和利用本发明。本发明仅受权利要求书及其全部范围和等效物的限制。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1