一种真空吸尘器的制作方法
1.本发明涉及吸尘器技术领域,特别是涉及一种真空吸尘器。
背景技术:
2.随着人类社会的进步发展,人们生活水平的不断提高,真空吸尘器作为一种家用清洁电器已在越来越多的家庭中使用。真空吸尘器一般是利用风机带动叶轮高速旋转,在密封的壳体内产生空气负压,使尘屑和垃圾等污物被吸入其内部。然后在内部将污物与空气分离,污物留置在指定位置,同时将洁净的空气排出吸尘器外。
3.然而,现有的真空吸尘器功能少,自动化程度不高,只能对地面上进行清理作业,无法对墙壁或者比较高的设施进行吸尘清理作业。
技术实现要素:
4.鉴于以上所述现有技术的缺点,本发明的目的在于提供一种真空吸尘器,用于解决现有技术中无法对墙壁或者比较高的设施进行吸尘清理作业的问题。
5.为解决上述技术问题,本发明是按如下方式实现的:一种真空吸尘器,包括真空吸尘器本体,所述真空吸尘器本体内设有风机、集尘仓和主控系统;所述真空吸尘器本体内设有四个空腔,所述空腔位于所述真空吸尘器本体内的侧边上;所述空腔内安装有驱动电机,所述驱动电机的电机轴上连接有螺旋桨;所述真空吸尘器本体的两侧和底部分别设有多个进风孔,所述进风孔通过管道连接于所述集尘仓;所述真空吸尘器本体上安装有可控制方向的前轮和可控制驱动的后轮。
6.进一步地,所述真空吸尘器本体的两侧和底部分别设有刷灰装置。
7.进一步地,所述刷灰装置包括伺服机和刷灰板,所述伺服机安装于所述真空吸尘器本体内,所述刷灰板位于所述真空吸尘器本体的外侧;所述刷灰板上设有刷毛,所述刷灰板通过驱动杆连接于所述伺服机的驱动端。
8.进一步地,所述毛刷位于所述刷灰板的上方和下方,所述刷灰板的中部设有呈线性均匀排列的通风孔。
9.进一步地,所述真空吸尘器本体呈矩形体结构,所述空腔位于所述真空吸尘器本体内的四个边角上。
10.进一步地,所述前轮通过伺服机实现方向控制,所述后轮通过轮毂电机实现驱动控制。
11.进一步地,所述真空吸尘器本体的侧边和顶部分别设有超声波传感器。
12.进一步地,所述真空吸尘器本体上设有与所述空腔相对应的螺旋桨排风口和与所述风机相对应的风机排风口。
13.进一步地,所述主控系统包括主控mcu、gps定位模块、无线通讯模块和飞行姿态控制模块;所述飞行姿态控制模块包括三轴陀螺仪、电子罗盘、加速度计、气压计。
14.进一步地,所述真空吸尘器本体上设有摄像头和与所述摄像头连接的图传模块。
15.如上所述,本发明的一种真空吸尘器,通过巧妙的设计,在真空吸尘器上设置了四个装有螺旋桨的驱动电机,在真空吸尘器的两侧又分别设置了进风孔,从而使得整个真空吸尘器能飞起利用侧边上的进风孔对墙壁或者比较高的设施进行吸尘清理作业。
附图说明
16.图1显示为本发明实施例中一种真空吸尘器的结构示意图;
17.图2显示为本发明实施例中一种真空吸尘器的框架示意图;
18.图3显示为本发明实施例中一种真空吸尘器的主视图;
19.图4显示为本发明实施例中一种真空吸尘器的侧视图;
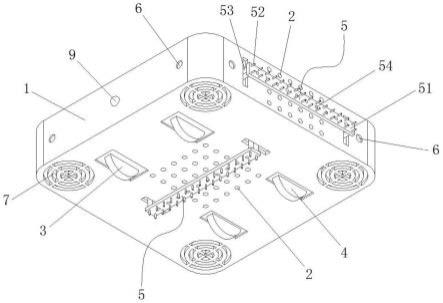
20.图5显示为本发明实施例中一种真空吸尘器的俯视图;
21.图6显示为本发明实施例中一种真空吸尘器的仰视图。
22.对应说明书附图内的附图标记参考如下:
23.真空吸尘器本体1,进风孔2,前轮3,后轮4,刷灰装置5,刷灰板51,刷毛52,驱动杆53,通风孔54,超声波传感器6,螺旋桨排风口7,风机排风口8,摄像头9。
具体实施方式
24.以下由特定的具体实施例说明本发明的实施方式,熟悉此技术的人士可由本说明书所揭露的内容轻易地了解本发明的其他优点及功效。
25.请参阅图1至图6。须知,本说明书附图所绘示的结构、比例、大小等,均仅用以配合说明书所揭示的内容,以供熟悉此技术的人士了解与阅读,并非用以限定本发明可实施的限定条件,故不具技术上的实质意义,任何结构的修饰、比例关系的改变或大小的调整,在不影响本发明所能产生的功效及所能达成的目的下,均应仍落在本发明所揭示的技术内容得能涵盖的范围内。同时,本说明书中所引用的如“上”、“下”、“左”、“右”、“中间”及“一”等的用语,亦仅为便于叙述的明了,而非用以限定本发明可实施的范围,其相对关系的改变或调整,在无实质变更技术内容下,当亦视为本发明可实施的范畴。
26.如图1至图6所示,本发明提供一种真空吸尘器,包括真空吸尘器本体1,真空吸尘器本体1内设有风机、集尘仓和主控系统。真空吸尘器本体1的两侧和底部分别设有多个进风孔2,进风孔2通过管道连接于集尘仓,侧边的进风孔2用于对墙壁或者比较高的设施进行吸尘清理作业,底部的进风孔2用于对地面的吸尘清理作业。当风机启动后,使得空气流体从进风孔2进入真空吸尘器本体1,尘屑垃圾随空气流体进入集尘仓内。
27.真空吸尘器本体1上安装有可控制方向的前轮3和可控制驱动的后轮4。前轮3通过伺服机实现方向控制,后轮4通过轮毂电机实现驱动控制。真空吸尘器本体1上可转动连接有前轮座,前轮安装在前轮座上,两个前轮座通过连杆连接,伺服机的驱动端连接于连杆,从而实现对前轮3的左右转动控制。
28.真空吸尘器本体1呈矩形体结构,真空吸尘器本体1内设有四个空腔,位于真空吸尘器本体1内的四个边角上。空腔内安装有驱动电机,驱动电机的电机轴上连接有螺旋桨,当四个螺旋桨转动后通过主控系统控制整个真空吸尘器起飞。
29.主控系统包括主控mcu、gps定位模块、无线通讯模块和飞行姿态控制模块。主控mcu可以选用stm32系列芯片,对整个真空吸尘器进行控制。飞行姿态控制模块包括三轴陀
螺仪、电子罗盘、加速度计和气压计244。三轴陀螺仪可以选用的型号为mpu6050,用于感应表体的俯仰角、偏航角、翻滚角,并且进行姿态解算;电子罗盘可以选用的型号为hmcl5883l,用于修正三轴陀螺仪的水平方向的积分累计误差;加速度计可以直接使用mpu6050中自带的加速度计,用于修正三轴陀螺仪的重力方向的积分累计误差;气压计可以选用的型号为ms5611系列,用于配合gps定位模块进行定高。无线通讯模块包括蜂窝组件、蓝牙模块和wifi组件,无线通讯模块用于与移动终端和服务器进行通讯交互。
30.真空吸尘器本体1上设有摄像头9和与摄像头连接的图传模块,通过蜂窝组件把实时的图像画面上传到远程服务器中,通过移动终端设备可以实时远程查看真空吸尘器的吸尘作业情况。
31.真空吸尘器本体1上设有与空腔相对应的螺旋桨排风口7和与风机相对应的风机排风口8。真空吸尘器本体1的侧边和顶部分别设有超声波传感器6,超声波传感器6使得真空吸尘器的上方和侧方有避障能力,使其不会在起飞后能对周围保持一个安全距离,不会发生严重碰撞。
32.真空吸尘器本体1的两侧和底部分别设有刷灰装置5。刷灰装置5包括伺服机和刷灰板51,伺服机安装于真空吸尘器本体1内,刷灰板51位于真空吸尘器本体1的外侧。刷灰板51上设有刷毛52,刷灰板51通过驱动杆53连接于伺服机的驱动端。毛刷52位于刷灰板51的上方和下方,刷灰板51的中部设有呈线性均匀排列的通风孔54,通风孔54使得尘屑垃圾也能从刷灰板51中被吸入真空吸尘器本体1中。伺服机控制刷灰板51来回移动,从而使得吸附牢固的尘屑垃圾也能被吸入真空吸尘器本体1内。
33.当使用时,真空吸尘器通过主控系统对前轮3和后轮4的控制在地面上移动,进行地面吸尘清理作业,通过主控系统对空腔内的驱动电机的控制使得真空吸尘器起飞,对墙壁或者比较高的设施进行吸尘清理作业。
34.综上所述,本发明的一种真空吸尘器,通过巧妙的设计,在真空吸尘器上设置了四个装有螺旋桨的驱动电机,在真空吸尘器的两侧又分别设置了进风孔,从而使得整个真空吸尘器能飞起利用侧边上的进风孔对墙壁或者比较高的设施进行吸尘清理作业。所以,本发明有效克服了现有技术中的种种缺点而达到更好的实用效果。
35.上述实施例仅例示性说明本发明的原理及其功效,而非用于限制本发明。任何熟悉此技术的人士皆可在不违背本发明的精神及范畴下,对上述实施例进行修饰或改变。因此,举凡所属技术领域中具有通常知识者在未脱离本发所揭示的精神与技术思想下所完成的一切等效修饰或改变,仍应由本发明的权利要求所涵盖。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1