清洁操作的执行方法及装置、存储介质及电子装置与流程
【】本技术涉及机器人领域,具体而言,涉及一种清洁操作的执行方法及装置、存储介质及电子装置。
背景技术
0、
背景技术:
1、近年来,随着人们生活水平的提高和技术的高速发展,在日常生活中,扫地机器人的存在为人们带来了便利,在一定程度上解放了人们的双手,减少了劳作量,但扫地机器人的扫地方式控制仍是一大难题。
2、现有技术中,提出了通过语音识别的方式来控制扫地机器人,通过用户与扫地机器人进行语音交互来向扫地机器人发送扫地命令,控制扫地机器人清扫指定区域,保证扫地机器人的工作效率和清洁度。但该方法没有考虑到的问题是,扫地机器人在运行过程中产生的噪音较大,导致用户的语音唤醒和语音交互的识别效果较差,用户体验感不好,且在语音指令通过后,扫地机器人执行清洁操作,未有对语音指令的发送对象进行识别的方案。
3、针对相关技术中,直接通过语音识别方式控制扫地机器人的方式,由于未对语音进行验证,且由于扫地机器人工作过程中的噪声较大,进而语音识别效果差,用户控制扫地机器人的体验度不好的问题,尚未提出有效的解决方案。
技术实现思路
0、
技术实现要素:
1、本发明实施例提供了一种清洁操作的执行方法及装置、存储介质及电子装置,以至少解决相关技术中,通过语音识别方式控制扫地机器人的方式由于噪声较大,进而语音识别效果差,用户控制扫地机器人的体验度不好的问题。
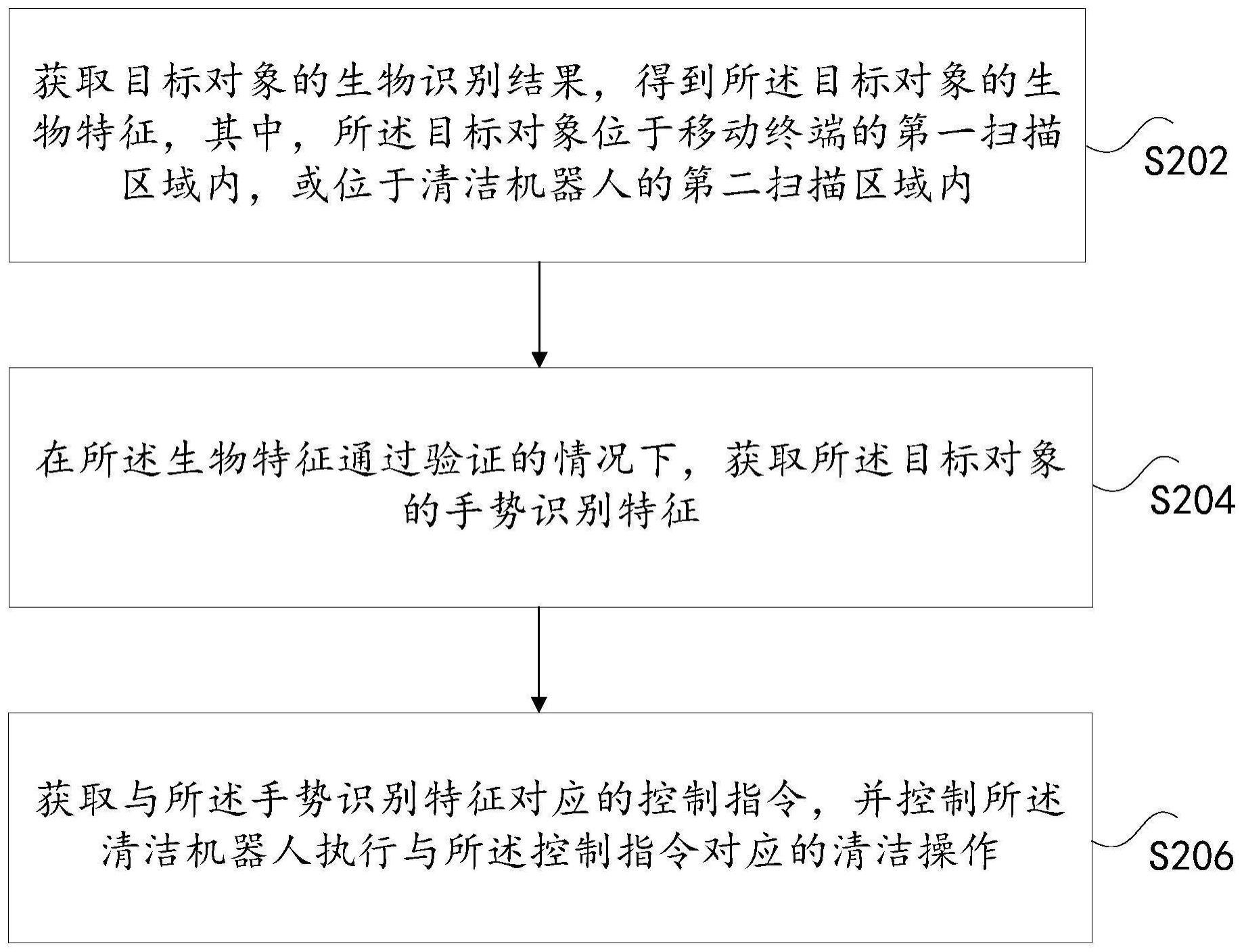
2、根据本发明实施例的一个方面,提供了一种清洁操作的执行方法,包括:获取目标对象的生物识别结果,得到所述目标对象的生物特征,其中,所述目标对象位于移动终端的第一扫描区域内,或位于清洁机器人的第二扫描区域内;在所述生物特征通过验证的情况下,获取所述目标对象的手势识别特征;获取与所述手势识别特征对应的控制指令,并控制所述清洁机器人执行与所述控制指令对应的清洁操作。
3、在一个示例性实施例中,在所述生物特征通过验证的情况下,获取所述目标对象的手势识别特征之前,所述方法还包括:确定所述清洁机器人是否识别到了所述目标对象的唤醒手势识别特征,其中,所述唤醒手势识别特征用于指示所述清洁机器人开启目标识别功能,所述目标识别功能用于确定与所述手势识别特征对应的控制指令;在所述清洁机器人识别到了所述目标对象的唤醒手势识别特征的情况下,开启所述目标识别功能。
4、在一个示例性实施例中,开启所述目标识别功能之后,所述方法还包括:在当前时刻之后的预设时间段内未识别到所述目前对象的手势识别特征的情况下,关闭所述目标识别功能。
5、在一个示例性实施例中,获取目标对象的生物识别结果,得到所述目标对象的生物特征,至少包括以下之一:通过所述清洁机器人对所述目标对象进行生物特征识别,得到所述生物识别结果,以及从所述生物识别结果中解析到所述目标对象的生物特征;接收所述移动终端对所述目标对象进行生物特征识别所得到的生物识别结果,以及从所述生物识别结果中解析到所述目标对象的生物特征。
6、在一个示例性实施例中,获取与所述手势识别特征对应的控制指令之前,所述方法还包括:接收所述目标对象的设置操作;响应于所述设置操作,设置不同的手势识别特征与不同的控制指令之间的对应关系。
7、在一个示例性实施例中,控制所述清洁机器人执行与所述控制指令对应的清洁操作的过程中,所述方法包括:确定所述清洁机器人是否识别到所述目标对象的终止手势识别特征;在识别到所述终止手势识别特征的情况下,终止所述清洁操作对应的,且正在执行的清洁操作。
8、在一个示例性实施例中,获取与所述手势识别特征对应的控制指令,包括:获取所述目标对象的生物特征对应的目标对应关系,其中,所述目标对应关系为所述目标对象的手势识别特征与控制指令的对应关系,且不同的目标对象的生物特征对应不同的对应关系;从所述目标对应关系中获取与所述手势识别特征对应的控制指令。
9、根据本发明实施例的另一个方面,还提供了一种清洁操作的执行装置,包括:第一获取单元,用于获取目标对象的生物识别结果,得到所述目标对象的生物特征,其中,所述目标对象位于移动终端的第一扫描区域内,或位于清洁机器人的第二扫描区域内;第二获取单元,用于在所述生物特征通过验证的情况下,获取所述目标对象的手势识别特征;第一控制单元,用于获取与所述手势识别特征对应的控制指令,并控制所述清洁机器人执行与所述控制指令对应的清洁操作。
10、在一个示例性实施例中,上述执行装置还包括:第一确定单元,用于确定所述清洁机器人是否识别到了所述目标对象的唤醒手势识别特征,其中,所述唤醒手势识别特征用于指示所述清洁机器人开启目标识别功能,所述目标识别功能用于确定与所述手势识别特征对应的控制指令;在所述清洁机器人识别到了所述目标对象的唤醒手势识别特征的情况下,开启所述目标识别功能。
11、在一个示例性实施例中,上述第一确定单元,还用于在当前时刻之后的预设时间段内未识别到所述目前对象的手势识别特征的情况下,关闭所述目标识别功能。
12、在一个示例性实施例中,上述第一获取单元,还用于通过所述清洁机器人对所述目标对象进行生物特征识别,得到所述生物识别结果,以及从所述生物识别结果中解析到所述目标对象的生物特征;接收所述移动终端对所述目标对象进行生物特征识别所得到的生物识别结果,以及从所述生物识别结果中解析到所述目标对象的生物特征。
13、在一个示例性实施例中,上述第二获取单元,还用于接收所述目标对象的设置操作;响应于所述设置操作,设置不同的手势识别特征与不同的控制指令之间的对应关系。
14、在一个示例性实施例中,上述第一控制单元还包括:第二确定单元,用于确定所述清洁机器人是否识别到所述目标对象的终止手势识别特征;在识别到所述终止手势识别特征的情况下,终止所述清洁操作对应的,且正在执行的清洁操作。
15、在一个示例性实施例中,上述第二获取单元,还用于获取所述目标对象的生物特征对应的目标对应关系,其中,所述目标对应关系为所述目标对象的手势识别特征与控制指令的对应关系,且不同的目标对象的生物特征对应不同的对应关系;从所述目标对应关系中获取与所述手势识别特征对应的控制指令。
16、根据本发明实施例的又一方面,还提供了一种计算机可读的存储介质,该计算机可读的存储介质中存储有计算机程序,其中,该计算机程序被设置为运行时执行上述清洁操作的执行方法。
17、根据本发明实施例的又一方面,还提供了一种电子装置,包括存储器、处理器及存储在存储器上并可在处理器上运行的计算机程序,其中,上述处理器通过计算机程序执行上述的清洁操作的执行方法。
18、在本发明实施例中,获取目标对象的生物识别结果,得到所述目标对象的生物特征,即识别目标对象的身份,其中,所述目标对象位于移动终端的第一扫描区域内,或位于清洁机器人的第二扫描区域内,即目标对象通过移动终端或清洁机器人进行身份识别;在所述生物特征通过验证的情况下,获取所述目标对象的手势识别特征;获取与所述手势识别特征对应的控制指令,并控制所述清洁机器人执行与所述控制指令对应的清洁操作;解决了相关技术中,直接通过语音识别方式控制扫地机器人的方式,由于未对语音进行验证,且由于扫地机器人工作过程中的噪声较大,进而语音识别效果差,用户控制扫地机器人的体验度不好的问题,实现了先对发出手势的目标对象的身份进行识别,提高了扫地机器人的安全使用性,还可以避免由于噪声影响了扫地机器人的智能控制效率的技术效果。
- 还没有人留言评论。精彩留言会获得点赞!