用于扫地机器人的握把模组及清洁装置的制作方法
1.本技术涉及清洁装置技术领域,尤其是涉及一种用于扫地机器人的握把模组及清洁装置。
背景技术:
2.随着智能家电的逐渐普及,扫地机器人也逐渐进入至人们的家庭中;扫地机器人也可以被称为自动打扫机、智能吸尘、机器人吸尘器等,是智能家用电器的一种,能凭借一定的人工智能,自动在房间内完成地板清理工作,代替人工对地板进行清扫。
3.相关技术中,扫地机器人主要包括行走模组与清扫吸尘模组,其中,行走模组可基于特定的路线带动整个扫地机器人在地板上移动,清扫吸尘模组用于对地板上的杂物进行清扫与吸取。但在实际生活场景中,也存在需要在特定区域内进行清扫的情况,此时若是由扫地机器人依照特定的路线进行清扫,相对会出现较多无效的清扫工作。
技术实现要素:
4.第一方面,为了便于用户基于实际场景对特定区域的地板进行清扫,减少无效清扫工作的出现,本技术提供一种用于扫地机器人的握把模组。
5.本技术提供的一种用于扫地机器人的握把模组采用如下的技术方案:一种用于扫地机器人的握把模组,包括握杆和与握杆端部连接的连接座,所述连接座用于与扫地机器人相连接,所述握杆用于供使用者握持以驱使扫地机器人移动;且所述握杆、连接座与扫地机器人依次连接后,所述扫地机器人的行走模组能够处于从动状态;所述握杆转动连接于连接座且转轴垂直于握杆长度,所述握杆相对于连接座具有初始位,所述握杆与连接座之间设有能够驱使握杆相对连接座摆动至初始位的回位组件。
6.通过采用上述技术方案,连接有握杆的连接座能够与扫地机器人相连接,再令扫地机器人的行走模组处于从动状态,从而使得使用者能够通过握杆对扫地机器人施力,达到手动控制扫地机器人清扫区域的目的;即可便于使用者基于实际需求驱使扫地机器人至对应需要清扫的地板区域进行清扫;相对于扫地机器人基于特定路线进行清扫,本方案能够有效减少扫地机器人无效的清扫工作。此外,采用回位组件可以对握杆相对连接座的位置进行回位,在使用者因事松开握杆时,握杆可以在回位组件的作用下回位至初始位,而不是自由下落至地面,可便于后续使用者的再次清扫,且可减少握杆横在地面而影响周边人员行走的情况。
7.可选的,所述回位组件包括脱手感应模块、回位驱动件和回位控制模块,所述脱手感应模块设于握杆用于供使用者握持的区域,且所述脱手感应模块能够将信号传输至回位控制模块;所述回位驱动件与回位控制模块电连接,且所述回位驱动件用于驱使握杆相对连接座摆动。
8.通过采用上述技术方案,在使用者的手部与握杆的被握持区域相分离后,脱手感应模块感应到脱手状态,并将相应的信号输出至回位控制模块中,回位控制模块基于接收
到的信号,即可控制回位驱动件驱使握杆摆动至初始位,达到驱使握杆回位的效果。
9.可选的,所述回位组件还包括主动回位模块,所述主动回位模块包括设于握杆上的主动回位触发件,且所述主动回位模块能够将信号传输至回位控制模块。
10.通过采用上述技术方案,使用者可以采用主动回位模块驱使握杆摆动至初始位,第一方面,在使用者完成相应区域的清扫后,可以主动控制握杆回到初始位。另一方面,在实际组装过程中,若是将握杆与连接座作为一个整体安装在扫地机器人上,令握杆相对连接座处于初始位,便于使用者将连接座安装于扫地机器人上;若是连接座是预先安装于扫地机器人上,则安装座上会转动设置有供握杆安装的安装件,通过主动回位模块的触发可驱使安装座上的安装件摆动至初始位握杆进行安装的位置,从而便于使用者将握杆安装于安装座上。
11.可选的,所述回位组件还包括用于监测握杆摆动角度的角度传感器,所述角度传感器与回位控制模块电连接。
12.通过采用上述技术方案,利用角度传感器对握杆摆动角度进行监测,在后续需要回位时,可基于握杆已摆动角度的情况进行相应角度回摆,达到回位的作用。
13.可选的,所述连接座设有用于引导握杆摆动的弧形导杆,所述回位组件包括套设于弧形导杆上的弧形弹簧,所述弧形弹簧一端与连接座相连,另一端与握杆相连;所述握杆偏离初始位时,所述弧形弹簧处于弹性形变状态。
14.通过采用上述技术方案,由弧形导杆上的弧形弹簧对握杆进行弹性力的施加,当使用者驱使握杆摆动而偏离初始位时,弧形弹簧受力发生弹性形变;若使用者松开握杆,利用弧形弹簧形变后的弹性回复力作用可以驱使握杆回摆至初始位,达到对握杆回位的目的。
15.可选的,所述连接座与扫地机器人相连接时,相对于所述连接座处于初始位的握杆与地板相垂直;所述连接座上转动设有连接筒,所述握杆与连接筒可拆卸连接。
16.通过采用上述技术方案,握杆与地板相垂直,可减少握杆在水平方向上的占用空间,减少对周边人员正常行走的影响;同时,也可减少握杆因重力在水平方向发生分力而对回位组件持续施力的情况。而连接筒的设置则可以便于对握杆进行拆装。
17.第二方面,为了便于用户基于实际场景对特定区域的地板进行清扫,减少无效清扫工作的出现,本技术提供一种清洁装置。
18.本技术提供的一种清洁装置采用如下的技术方案:一种清洁装置,包括扫地机器人,还包括上述的用于扫地机器人的握把模组,所述握杆、连接座与扫地机器人依次连接后,所述扫地机器人的行走模组能够处于从动状态。
19.通过采用上述技术方案,将握把模组与扫地机器人安装到位后,并令扫地机器人的行走模组处于从动状态,即可使得使用者能够通过握杆对扫地机器人施力,以驱使扫地机器人移动至需要被清扫的区域进行清扫工作,操作方便,且能够减少扫地机器人无效的清扫工作。
20.可选的,所述扫地机器人内设有用于控制行走模组工作的行走控制器,所述行走控制器具有自动控制模式和手动控制模式;所述行走控制器处于手动控制模式时,行走模组处于从动状态;所述握杆与连接座的连接处或连接座与扫地机器人的连接处设有切换感应件,所述握杆与连接座、连接座与扫地机器人均连接后,所述切换感应件能够传输信号至
行走控制器。
21.通过采用上述技术方案,利用切换感应件对握把组件与扫地机器人的组装情况进行感应,并在组装完成后,将相应的信号发送至行走控制器中,利用行走控制器自自动控制模式切换至手动控制模式,从而使得行走模组处于从动状态,以便使用者通过握杆对扫地机器人的行走路径进行手动控制。
22.可选的,所述连接座与扫地机器人通过锁紧组件相固定,所述握杆与连接座上转动连接的连接筒插接配合,且所述切换感应件设于握杆与连接筒的插接位置;所述握杆用于伸入连接筒的区域设有环槽,所述连接筒侧壁设有通孔,所述通孔设有用于嵌入环槽内的滚珠,所述滚珠的部分外露于连接筒的外壁;所述连接座成型有供连接筒摆动的活动槽,所述活动槽的槽壁设有与滚珠外露部分相配合的弧形抵接槽,所述弧形抵接槽与滚珠相抵时,所述滚珠能够凸出连接筒内壁;所述弧形抵接槽设有解锁槽,所述连接筒的握杆处于初始位时,所述解锁槽用于供滚珠抵接;所述解锁槽与滚珠相抵时,所述滚珠靠近连接筒中心的一侧能够缩入连接筒的通孔内。
23.通过采用上述技术方案,将连接座与扫地机器人通过锁紧组件固定连接,令握杆与连接座的连接筒之间实现便携插接,且在握杆与连接筒相插接时,可利用握杆与连接筒插接位置的切换感应件感应到两者是否组装完成,以便切换至手动控制模式。同时,握杆带动连接筒偏离初始位时,连接筒内的滚珠会嵌入握杆端部的环槽内,达到对握杆进行抱紧限位的作用,以限制握杆自连接筒中脱离,减少正常清扫工作中握杆因使用者施力而自连接筒中脱离的情况。
24.可选的,所述握杆与连接座上转动连接的连接筒通过锁紧组件相固定,所述连接座与扫地机器人插接配合,且所述切换感应件设于连接座与扫地机器人的插接位置。
25.通过采用上述技术方案,将握杆与连接座通过锁紧组件相固定,即将整个握把模组视为一个整体,实际使用过程中,通过提拿握杆带动连接座插接至扫地机器人的插接位置,达到对握把模组的安装;同时,在连接座与扫地机器人插接到位后,利用切换感应件可能将相应的信号传输至行走控制器中,以使行走控制器能够基于对应的信号自自动控制模式切换至手动控制模式,以便使用者通过握杆对扫地机器人的行走路径进行手动控制。
26.综上所述,本技术包括以下至少一种有益技术效果:使用者能够通过握杆对扫地机器人施力,达到手动控制扫地机器人清扫区域的目的;便于使用者基于实际需求驱使扫地机器人至对应需要清扫的地板区域进行清扫,有效减少扫地机器人无效的清扫工作;采用回位组件可以对握杆相对连接座的位置进行回位,在使用者因事松开握杆时,握杆可以回位组件的作用下回位至初始位,而不是自由下落至地面,可便于后续使用者的再次清扫,且可减少握杆横在地面而影响周边人员行走的情况;若是将握杆与连接座作为一个整体安装在扫地机器人上,令握杆相对连接座处于初始位,便于使用者将连接座安装于扫地机器人上;若是连接座是预先安装于扫地机器人上,则安装座上会转动设置有供握杆安装的安装件,通过主动回位模块的触发可驱使安装座上的安装件摆动至初始位握杆进行安装的位置,从而便于使用者将握杆安装于安装座上。
附图说明
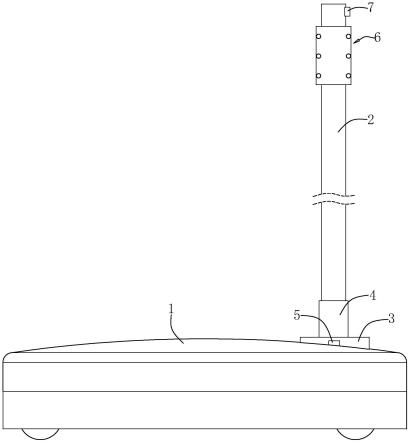
27.图1是本技术实施例1的整体结构示意图;图2是本技术实施例1中扫地机器人、握杆和连接座的示意图;图3是本技术实施例1中扫地机器人、握杆和连接座的分解示意图;图4是图3中a部分的放大示意图;图5是本技术实施例2中扫描机器人与连接座的剖面示意图;图6是图5中b部分的放大示意图;图7是本技术实施例3中连接座、连接筒和回位组件的示意图。
28.附图标记说明:1、扫地机器人;11、插接孔;12、限位孔;2、握杆;21、环槽;3、连接座;31、活动槽;32、弧形抵接槽;33、解锁槽;34、弧形导杆;35、弧形弹簧;36、贯穿孔;4、连接筒;41、通孔;411、滚珠;42、圆弧抵接部;43、解锁凹槽;5、回位驱动电机;6、脱手感应模块;7、主动回位触发件;8、活动柱;81、t型槽;9、限位柱;91、t型块;10、直线弹簧。
具体实施方式
29.以下结合附图对本技术作进一步详细说明。
30.扫地机器人1主要包括行走模组与清扫吸尘模组,其中,行走模组可基于特定的路线带动整个扫地机器人1在地板上移动,清扫吸尘模组用于对地板上的杂物进行清扫与吸取。
31.实施例1:本技术实施例公开一种清洁装置。参照图1和图2,清洁装置包括扫地机器人1和用于扫地机器人1的握把模组,具体的,用于扫地机器人1的握把模组包括握杆2和连接座3,其中,扫地机器人1设置有供连接座3安装的安装位,连接座3连接于扫地机器人1的安装位处,相应的,握杆2的一端与连接座3转动连接,以使握杆2能够受驱动相对连接座3转动。
32.同时,当握杆2与连接座3、连接座3与扫地机器人1均完成组装后,可以令扫地机器人1的行走模组处于从动状态,以便使用者通过握杆2对扫地机器人1施力,达到手动控制扫地机器人1清扫区域的目的。此外,握杆2相对连接座3具有初始位;相应的,握杆2与连接座3之间还安装有回位组件,回位组件可以对握杆2相对连接座3的位置进行回位。在使用者因事松开握杆2时,握杆2可以回位组件的作用下回位至初始位,而不是自由下落至地面,可便于后续使用者的再次清扫,且可减少握杆2横在地面而影响周边人员行走的情况。
33.具体的,扫地机器人1内设有用于控制行走模组工作的行走控制器,行走控制器内置有自动控制模式和手动控制模式。当行走控制器处于自动控制模式时,行走控制器可以基于特定的路线带动整个扫地机器人1在地板上移动。当行走控制器处于手动控制模式时,行走模组处于从动状态,以使扫地机器人1可以在握杆2的控制下在地板上移动。
34.本实施例中,连接座3与扫地机器人1通过锁紧组件相固定,具体的,扫地机器人1上开设有插接孔11,连接座3上成型有能够插入插接孔11的插接部;相应的,锁紧组件包括多个螺栓,在连接座3上的插接部插入扫地机器人1的插接孔11中后,利用螺栓将连接座3与扫地机器人1锁紧,以此达到将连接座3与扫地机器人1固定连接的目的。
35.同时,连接座3通过转轴的设置转动连接有供握杆2端部插入的连接筒4,通过连接筒4的设置实现握杆2与连接座3之间的转动连接。握杆2与连接筒4之间还安装有切换感应
件,切换感应件可以感应到握杆2与连接筒4的安装完成情况;若感应到握杆2与连接筒4安装完成,切换感应件向行走控制器传输相应的信号,以使行走控制器可以基于切换感应件发出的信号从自动控制模式切换为手动控制模式。本实施例中,切换感应件可以为安装在连接筒4上的位置感应器;并且,位置传感器可以通过导电线经由连接座3的插接部与扫地机器人1的插接孔11再与行走控制器电连接,以便实现位置传感器与行走控制器之间的信号传输;在另一实施例中,位置传感器也可以采用无线传输的方式与行走控制器实现信号传输。
36.此外,连接筒4相对于连接座3具有初始位,且处于初始位的连接筒4与地面相垂直;同时,当握杆2插接于处于初始位的连接筒4中时,握杆2也相对连接座3处于初始位。相应的,回位组件安装于连接座3与连接筒4之间,用于驱使连接筒4回位至初始位,以使插接于连接筒4上的握杆2能够被驱使回位至初始位。
37.参照图2和图3,回位组件包括回位驱动件、角度传感器、脱手感应模块6、回位控制模块和主动回位模块。其中,回位驱动件为安装于连接座3上的回位驱动电机5,且回位驱动电机5的输出轴与连接筒4的转轴相连接,以用于驱使连接筒4进行摆动;相应的,连接座3上设有用于为回位驱动电机5供电的电源,或是回位驱动电机5通过导线连接于扫地机器人1的电源。同时,角度传感器安装于连接座3上,用于监测回位驱动电机5输出轴的转动角度。
38.脱手感应模块6安装于握杆2上用于供使用者握持的区域,用于感应握杆2被握持的区域是否被使用者握持;本实施例中,脱手感应模块6可以包括多个与回位控制模块电连接的光电传感器或激光传感器,回位控制模块可以为安装于握杆2、连接座3或扫地机器人1上的控制电路板。
39.具体的,若回位控制模块安装于握杆2上,脱手感应模块6可以与回位控制模块通过导电线实现信号传输;相应的,在握杆2与安装筒的连接处设置有用于导通信号的导线,以使得回位控制模块与回位驱动电机5通过导线实现信号传输。若回位控制模块安装于连接座3,回位控制模块可以与回位驱动电机5通过导线相连接;相应的,脱手感应模块6可以与回位控制模块进行信号的无线传输。若回位控制模块安装于扫地机器人1中,可以令回位控制模块与连接座3中的回位驱动电机5通过导线连接;相应的,脱手感应模块6可以与回位控制模块进行信息的无线传输。
40.在清洁装置实际使用的过程中,若使用者松开握杆2,由脱手感应模块6将脱手的信号传输至回位控制模块中,以使得回位控制模块可基于自身内设的程序控制回位驱动电机5驱使连接筒4带动握杆2摆动至初始位。具体的,在回位控制模块的控制程序中,可以设置延时维持功能与过时回位功能。其中,延时维持功能可以在使用者松开握杆2的特定时间如5秒内维持握杆2所处的状态,以便使用者换手进行握持;而过时回位功能可以在使用者松开握杆2的特定时间如5秒之后开始驱动握杆2摆动至初始位。
41.此外,主动回位模块用于供使用者主动控制连接筒4进行回位,具体的,主动回位模块包括安装于握杆2上的主动回位触发件7,本实施例中,主动回位触发件7可以为触发式按键;主动回位触发件7与主动回位模块能够进行信号传输,且主动回位触发件7与主动回位模块之间的信号传输方式类同于脱手感应模块6与主动回位模块之间的信号传输方式。相应的,回位控制模块的控制系统内设的控制程序中可以具有手动复位功能;在清洁装置实际使用的过程中,使用者清扫完毕后,可手动按压主动回位模块中的主动回位触发件7达
到启动手动复位功能的效果,从而在手动复位功能的控制下驱动握杆2摆动至初始位。
42.参照图3和图4,握杆2与连接筒4之间还安装有防脱结构,具体的,防脱结构包括开设于握杆2端部的环槽21和设于连接筒4内能够嵌设至环槽21内的滚珠411。其中,连接筒4的侧壁设有供滚珠411嵌设的通孔41,滚珠411的部分可以外露于连接筒4的侧壁,即滚珠411能够经由通孔41自连接筒4的内壁凸出,也可以自连接筒4的外壁凸出。在握杆2插接至连接筒4中时,自连接筒4内壁凸出的滚珠411能够嵌设至握杆2端部的环槽21内,以此达到防脱的效果。
43.相应的,连接座3上成型有供连接筒4摆动的活动槽31,活动槽31的槽壁开设有与滚珠411自连接筒4外壁露出部分相配合的弧形抵接槽32,且在弧形抵接槽32与滚珠411相抵时,滚珠411能够自连接筒4内壁凸出;若此时连接筒4内插接有握杆2,凸出的滚珠411会相应嵌入握杆2端部的环槽21内,以限制握杆2自连接筒4中脱离。
44.同时,弧形抵接槽32上开设有解锁槽33,在连接筒4处于初始位时,解锁槽33用于供滚珠411相抵;并且,解锁槽33与滚珠411相抵时,滚珠411靠近连接筒4中心的一侧能够缩入连接筒4的通孔41中。此时,可对处于初始位的连接筒4中的握杆2进行取出,或是将握杆2插接于处于初始位的连接筒4内。
45.本技术实施例一种清洁装置的实施原理为:连接有握杆2的连接座3能够与扫地机器人1相连接,在组装完成后,利用切换感应件向将相应的信号发送至行走控制器中,以使行走控制器自自动控制模式切换至手动控制模式;从而使得行走模组处于从动状态,以便使用者通过握杆2对扫地机器人1的行走路径进行手动控制,达到手动控制扫地机器人1清扫区域的目的。
46.同时,在清洁装置实际使用的过程中,若使用者松开握杆2,由脱手感应模块6将脱手的信号传输至回位控制模块中,以使得回位控制模块可基于自身内设的程序控制回位驱动电机5驱使连接筒4带动握杆2摆动至初始位。
47.具体的,在回位控制模块的控制程序中,可以设置延时维持功能与过时回位功能。其中,延时维持功能可以在使用者松开握杆2的特定时间如5秒内维持握杆2所处的状态,以便使用者换手进行握持;而过时回位功能可以在使用者松开握杆2的特定时间如5秒之后开始驱动握杆2摆动至初始位。
48.此外,在清洁装置实际使用的过程中,使用者清扫完毕后,可手动按压主动回位模块中的主动回位触发件7达到启动手动复位功能的效果,从而在手动复位功能的控制下驱动握杆2摆动至初始位。
49.而在连接筒4受使用者的外力作用而偏离初始位时,防脱结构中的滚珠411嵌在握杆2的环槽21内,以对握杆2起到防脱作用;而当连接筒4摆动至初始位时,防脱结构处于解锁状态,可便于使用者将握杆2自连接筒4中抽离,或是便于使用者将握杆2插入至连接筒4内。
50.实施例2:本技术实施例公开一种清洁装置,参照图5,本实施例与实施例1的区别在于:连接座3的连接筒4与握杆2通过锁紧组件相固定,具体的,锁紧组件包括多个螺栓,在握杆2插接于连接筒4中后,利用螺栓将握杆2与连接筒4锁紧,以此达到将连接筒4与握杆2固定连接的目的。此时,即是将连接座3与握杆2作为一个整体的握把模组。
51.同时,扫地机器人1与连接座3相插接,具体的,扫地机器人1上开设有插接孔11,连接座3成型有能够插入插接孔11内的插接部;相应的,切换感应件安装于插接孔11内,用于感应连接座3上的插接部是否插接到位。
52.参照图5和图6,扫地机器人1与连接座3之间安装有防脱结构,具体的,防脱结构包括滑移连接于连接座3的活动柱8、设于活动柱8与连接座3之间的直线弹簧10、连接活动柱8的限位柱9和开设在插接孔11侧壁的限位孔12。其中,连接座3的插接部内部中空设置,活动柱8在插接部的内部滑移;直线弹簧10套设于活动柱8上,且直线弹簧10的一端与活动柱8相连接,另一端与连接座3相连接。
53.相应的,连接筒4与连接座3转动连接的连接端端部设有圆弧抵接部42,圆弧抵接部42用于抵住活动柱8的上端,以使直线弹簧10处于拉伸变形或压缩变形的状态;并且,圆弧抵接部42上开设有解锁凹槽43,当连接筒4处于初始位时,解锁凹槽43用于供活动柱8的上端嵌入,以使活动柱8能够在直线弹簧10的弹性回复力作用下向上移动。
54.同时,连接座3的插接部侧壁开设有贯穿孔36,限位柱9滑移穿设于贯穿孔36中,且限位柱9的一端能够自插接部外壁凸出,另一端成型有t型块91;相应的,活动柱8侧壁沿自身的运动方向开设有供t型块91滑移的t型槽81,且t型槽81呈倾斜状,倾斜的t型槽81下端靠近于活动柱8的中心。自插接部外壁凸出的限位柱9端部可以嵌入限位孔12中,从而达到对连接座3的防脱作用。同时,在连接筒4摆动至初始位时,活动柱8会相应上移,从而带动限位柱9的端部与限位孔12相脱离,以便实现连接座3与扫地机器人1之间的插接与分离。
55.实施例3:本技术实施例公开一种清洁装置,参照图7,本实施例与实施例1的区别在于:回位组件不同;具体的,连接座3上安装有用于引导连接筒4摆动的弧形导杆34,相应的,回位组件包括套设在弧形导杆34上的弧形弹簧35,弧形弹簧35的一端与连接座3相连接,另一端与连接筒4相连接。并且,在连接筒4偏离初始位时,弧形弹簧35处于弹性形变状态;从而在使用者松开握杆2后,利用弧形弹簧35的回复力作用可以驱使连接筒4带动握杆2摆动至初始位。
56.以上均为本技术的较佳实施例,并非依此限制本技术的保护范围,故:凡依本技术的结构、形状、原理所做的等效变化,均应涵盖于本技术的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1