柔性连接件及清洁机器人的制作方法
本申请涉及清洁设备,尤其涉及一种柔性连接件及清洁机器人。
背景技术:
1、随着科技的发展,扫地机器人已经进入越来越多的家庭,使用扫地机器人能够提高人们的生活品质。现有技术中,为了使扫地机器人的拖布能够在清洁地面往复移动,设计拖布组件包括拖布基板、支架和驱动电机,驱动电机驱动拖布基板相对支架移动。其中,在拖布基板与支架之间设置弹性连接部,以限制拖布基板的移动方向,然而,弹性连接部由一个类似矩形框的结构构成,该结构需要通过使用螺钉分别于拖布基板和支架连接,装配操作繁琐,且变形空间大不易于限制拖布基板的移动,存在改进的空间。
技术实现思路
1、有鉴于此,本申请的目的是为了克服现有技术中的不足,本申请提供了一种柔性连接件,以至少解决现有技术中弹性连接部变形空间大的技术问题。
2、为实现上述目的,本申请采用的技术方案如下:
3、第一方面,本申请实施例提供了一种柔性连接件,该柔性连接件包括:
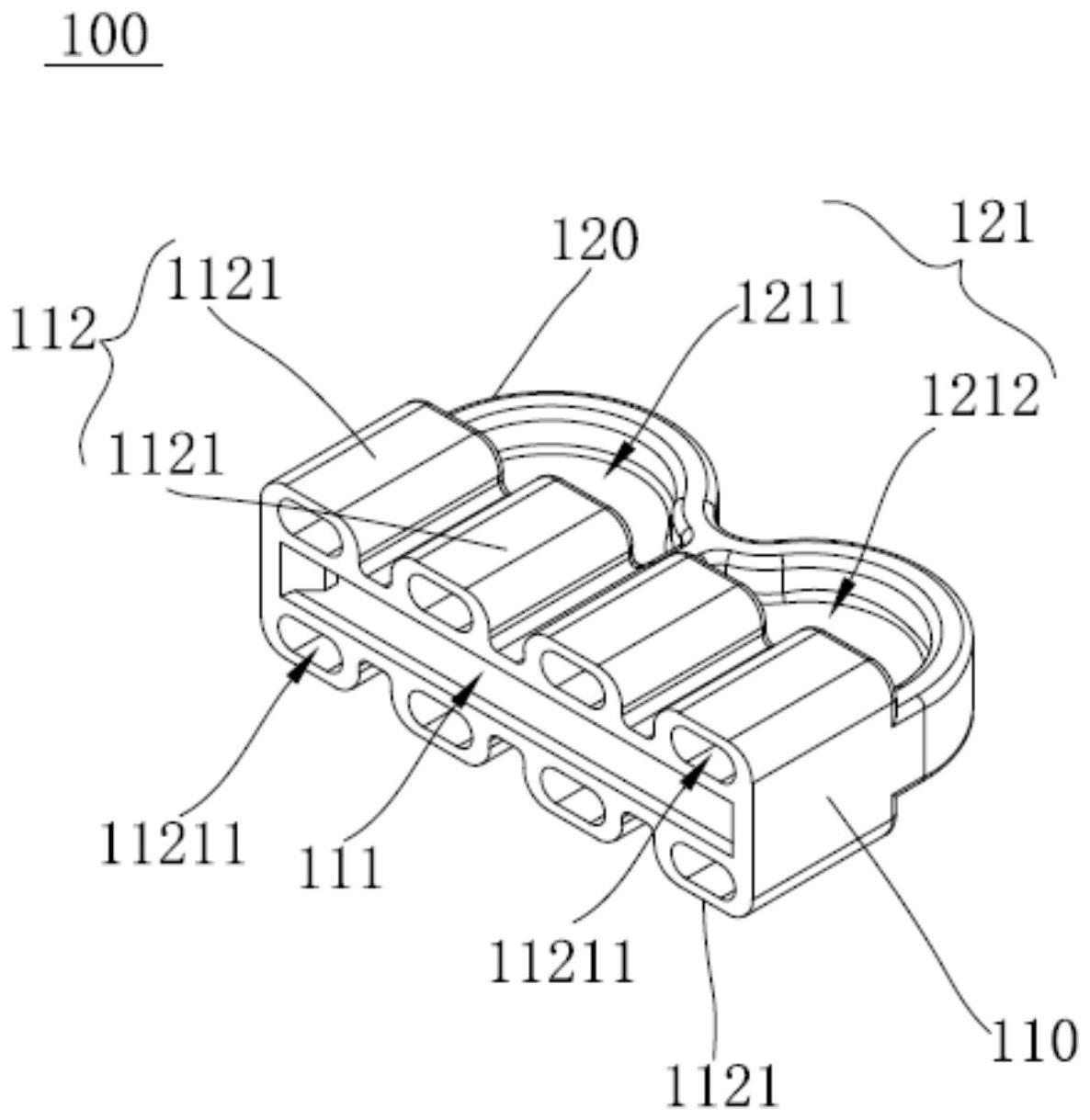
4、柔性主体,具有相对设置的第一面和第二面,所述第一面和所述第二面中的至少一面上设置有防滑部,且所述柔性主体还设置有连接部;
5、弹性体,设置于所述柔性主体背离所述连接部的一侧。
6、另外,根据本申请的柔性连接件,还可具有如下附加的技术特征:
7、在第一方面的其中一个实施例中,所述弹性体开设有凹槽。
8、在第一方面的其中一个实施例中,所述弹性体上设置有分隔筋,所述分隔筋将所述凹槽分隔形成第一槽体和第二槽体。
9、在第一方面的其中一个实施例中,所述第一槽体和所述第二槽体的外槽壁分别呈弧形结构。
10、在第一方面的其中一个实施例中,所述第一槽体的外槽壁与所述第二槽体的外槽壁为圆弧过渡连接,圆弧所对应的圆心位于所述第一槽体或所述第二槽体的外侧,所述弧形结构所对应的圆心位于所述第一槽体或所述第二槽体的内侧。
11、在第一方面的其中一个实施例中,所述分隔筋的远离所述柔性主体的方向的长度小于所述弧形结构对应的半径。
12、在第一方面的其中一个实施例中,所述柔性主体向所述第一面或所述第二面的方向形成多个条形凸起,多个所述条形凸起沿第一方向间隔设置且限定形成所述防滑部。
13、在第一方面的其中一个实施例中,所述条形凸起沿第二方向开设有盲孔,所述第一方向与所述第二方向垂直。
14、在第一方面的其中一个实施例中,所述第一面和所述第二面均设置有所述防滑部。
15、在第一方面的其中一个实施例中,所述柔性主体沿第二方向开设有卡槽,所述卡槽形成所述连接部。
16、第二方面,本申请实施例还提供了一种清洁机器人,所述清洁机器人包括上述任一实施例中所述的柔性连接件。
17、相对于现有技术,本申请的有益效果是:本申请提出一种柔性连接件及清洁机器人,其中,柔性连接件包括柔性主体和弹性体。在柔性主体的相对两侧设置第一面和第二面,并在第一面和第二面中的至少一面上设置防滑部,防滑部能够抵接在清洁机器人的拖板本体或活动板上,以增加柔性主体与拖板本体之间的摩擦力,便于限制活动板的移动,同时,连接部用于与活动板连接,弹性体能够抵接在拖板本体上,进一步限制活动板的移动,使活动板能够移动的范围较小,使其往复移动,便于与活动板连接的拖布对清洁面的擦拭,提高清洁效果。
技术特征:
1.一种柔性连接件,其特征在于,所述柔性连接件包括:
2.根据权利要求1所述的柔性连接件,其特征在于,所述弹性体开设有凹槽。
3.根据权利要求2所述的柔性连接件,其特征在于,所述弹性体上设置有分隔筋,所述分隔筋将所述凹槽分隔形成第一槽体和第二槽体。
4.根据权利要求3所述的柔性连接件,其特征在于,所述第一槽体和所述第二槽体的外槽壁分别呈弧形结构。
5.根据权利要求4所述的柔性连接件,其特征在于,所述第一槽体的外槽壁与所述第二槽体的外槽壁为圆弧过渡连接,圆弧所对应的圆心位于所述第一槽体或所述第二槽体的外侧,所述弧形结构所对应的圆心位于所述第一槽体或所述第二槽体的内侧。
6.根据权利要求5所述的柔性连接件,其特征在于,所述分隔筋的远离所述柔性主体的方向的长度小于所述弧形结构对应的半径。
7.根据权利要求1至6中任一项所述的柔性连接件,其特征在于,所述柔性主体向所述第一面或所述第二面的方向形成多个条形凸起,多个所述条形凸起沿第一方向间隔设置且限定形成所述防滑部。
8.根据权利要求7所述的柔性连接件,其特征在于,所述条形凸起沿第二方向开设有盲孔,所述第一方向与所述第二方向垂直。
9.根据权利要求7所述的柔性连接件,其特征在于,所述第一面和所述第二面均设置有所述防滑部。
10.根据权利要求1至6中任一项所述的柔性连接件,其特征在于,所述柔性主体沿第二方向开设有卡槽,所述卡槽形成所述连接部。
11.一种清洁机器人,其特征在于,包括有如权利要求1至10中任一项所述的柔性连接件。
技术总结
本申请公开了一种柔性连接件及清洁机器人,涉及清洁设备技术领域。柔性连接件包括柔性主体和弹性体。柔性主体具有相对设置的第一面和第二面,第一面和第二面中的至少一面上设置有防滑部,柔性主体设有连接部;弹性体设于柔性主体背离连接部的一侧。本申请提供的柔性连接件,在第一面和第二面中的至少一面上设置防滑部,防滑部能够抵接在清洁机器人的拖板本体或活动板上,以增加柔性主体与拖板本体之间的摩擦力,便于限制活动板的移动,同时,连接部用于与活动板连接,弹性体能够抵接在拖板本体上,进一步限制活动板的移动,使活动板能够移动的范围较小,便于与活动板连接的拖布对清洁面的擦拭,提高清洁效果。
技术研发人员:胡永华,杨剑君
受保护的技术使用者:深圳市优纪元科技有限公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!