一种自动归位餐桌椅
1.本实用新型涉及自动化技术领域,尤其涉及一种自动归位餐桌椅。
背景技术:
2.截至2019年底,我国60周岁及以上人口达到了25388万人,占总人口的18.1%,意味着我国已经步入了老龄化社会,并且随着年轻人生活压力越来越大和生活节奏越来越快,人们对于家中自动化和智能化的程度要求越来越高,洗碗机和洗衣机等传统自动化家居越发成熟,扫地机器人和拖地机器人等新型智能化家居也在市场中占据一席之地。但是市场上对于餐桌和餐桌椅方面的创新越发不足,尤其是对于老年人来说,餐桌椅摆在餐桌外会比较占地方并且会影响到扫地和拖地等对于地面的清洁,尤其是限制和影响到了扫地和拖地机器人的行动。
3.除此之外,对于餐厅而言,摆放整齐餐桌椅需要消耗大量的人力和时间成本,而且无法做到人走椅即归,会给新顾客造成餐厅较为混乱的不好印象。
技术实现要素:
4.为克服上述问题,本实用新型提供一种自动归位餐桌椅。
5.本实用新型采用的技术方案是:一种自动归位餐桌椅,包括餐桌和座椅,餐桌包括桌面,桌面的后端底面连接有l形桌腿,l形桌腿包括放置在地面上的底板和垂直连接在底板后端的立柱;立柱的前侧下部设有用于检测座椅位置的检测装置,底板设有开口向前的圆弧形限位槽,圆弧形限位槽的形状与座椅的底面形状相适配;座椅具有第一状态和第二状态,在所述第一状态下,座椅处于餐桌的圆弧形限位槽内,在所述第二状态下,座椅向外移动至离开圆弧形限位槽;
6.所述座椅包括自上而下依次连接的椅面、抬升模块和移动模块,移动模块的底部支撑在地面上;移动模块包括具有中空内腔的外壳,外壳的下端开口,外壳的上端连接有抬升模块;外壳的内腔设有转盘、转向电机和抬升杆,抬升杆是电动推杆,抬升杆的底部与外壳的顶部内壁固定连接,抬升杆的输出端沿竖直向下与转向电机相连,转向电机与转盘连接并驱动转盘转动;转盘的底面设有多个定向轮,定向轮由驱动电机驱动;外壳的顶部环绕设置有位置检测器,位置检测器与检测装置相互感应以确认移动模块的移动路径,使得座椅能移动至餐桌的圆弧形限位槽内;
7.抬升模块包括电推杆,电推杆的底部固定在外壳顶面,电推杆的输出端沿竖直向上穿过传感器与椅面垂直连接,传感器与电推杆输出端的侧壁相连;椅面能随移动模块移动,并随抬升模块升降。
8.进一步,所述桌面的底面开有长方形槽,长方形槽内设有用于勾住椅面的机械爪,机械爪内位置设有桌底检测器;在座椅的第一状态下,椅面、抬升模块、移动模块和桌底检测器的轴心线共线;桌底检测器与传感器相互感应,以确认椅面处于机械爪可抓取范围。
9.本实用新型的有益效果是:
10.1.能够在一定程度上弥补市场上有关于自动归位的椅子的缺少;
11.2.对于老年人来说能够避免用餐结束后所需要的弯腰动作,即可将椅子自动归位;
12.3.对于快节奏的年轻人来说能给予更加优质的生活体验;
13.4.方便扫地机器人清理餐桌地面,更加方便保持家庭卫生环境。
附图说明
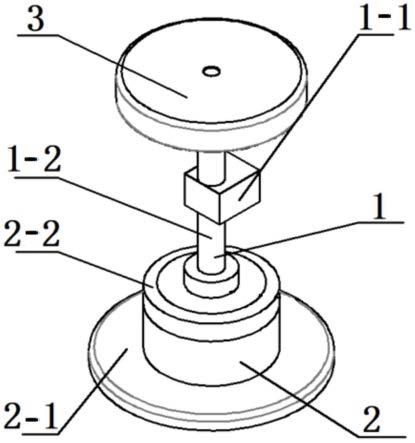
14.图1为餐椅整体结构示意图。
15.图2为餐椅移动模块剖视图。
16.图3为餐椅移动模块仰视图。
17.图4为餐桌整体结构示意图。
18.图5为餐桌桌面底部结构示意图。
19.附图标记说明:1-1传感器;1-2电推杆;2移动模块;2-1外壳;2-2位置检测器;2-3转向盘;2-4定向轮;2-5抬升杆;2-6转向电机;3椅面;4餐桌;4-1限位槽;4-2检测装置;4-3桌面;4-4机械爪;4-5桌底检测器。
具体实施方式
20.下面将结合附图对本实用新型专利的技术方案进行清楚、完整地描述,显然,所描述的实施例是本实用新型一部分实施例,而不是全部的实施例。基于本实用新型中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本实用新型保护的范围。
21.在本实用新型的描述中,需要说明的是,如出现术语“中心”、“上”、“下”、“左”、“右”、“竖直”、“水平”、“内”、“外”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本实用新型和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本实用新型的限制。此外,如出现术语“第一”、“第二”、“第三”仅用于描述目的,而不能理解为指示或暗示相对重要性。
22.在本实用新型的描述中,需要说明的是,除非另有明确的规定和限定,如出现术语“安装”、“相连”、“连接”应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或一体地连接;可以是机械连接,也可以是电连接;可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通。对于本领域的普通技术人员而言,可以具体情况理解上述术语在本实用新型中的具体含义。
23.参照附图,一种自动归位餐桌椅,其特征在于:包括餐桌4和座椅,餐桌4包括桌面4-3,桌面4-3的后端底面连接有l形桌腿,l形桌腿包括放置在地面上的底板和垂直连接在底板后端的立柱;立柱的前侧下部设有用于检测座椅位置的检测装置4-2,底板设有开口向前的圆弧形限位槽4-1,圆弧形限位槽4-1的形状与座椅的底面形状相适配;座椅具有第一状态和第二状态,在所述第一状态下,座椅处于餐桌的圆弧形限位槽4-1内,在所述第二状态下,座椅向外移动至离开圆弧形限位槽4-1;
24.所述座椅包括自上而下依次连接的椅面3、抬升模块1和移动模块2,移动模块2的
底部支撑在地面上;移动模块2包括具有中空内腔的外壳2-1,外壳2-1的下端开口,外壳2-1的上端连接有抬升模块1;外壳2-1的内腔设有转盘2-3、转向电机2-6和抬升杆2-5,抬升杆2-5是电动推杆,抬升杆2-5的底部与外壳2-1的顶部内壁固定连接,抬升杆2-5的输出端沿竖直向下与转向电机2-6相连,转向电机2-6与转盘2-3连接并驱动转盘2-3转动;转盘2-3的底面设有多个定向轮2-4,定向轮2-4由驱动电机驱动;外壳2-1的顶部环绕设置有位置检测器2-2,位置检测器2-2与检测装置4-2相互感应以确认移动模块2的移动路径,使得座椅能移动至餐桌的圆弧形限位槽4-1内;
25.抬升模块1包括电推杆1-2,电推杆1-2的底部固定在外壳2-1顶面,电推杆1-2的输出端沿竖直向上穿过传感器1-1与椅面3垂直连接,传感器1-1与电推杆1-2输出端的侧壁相连;椅面3能随移动模块2移动,并随抬升模块1升降。
26.所述桌面4-3的底面开有长方形槽,长方形槽内设有用于勾住椅面3的机械爪4-4,机械爪4-4内位置设有桌底检测器4-5,椅面3、抬升模块1、移动模块2和桌底检测器4-5的轴心线共线;桌底检测器4-5与传感器1-1相互感应,以确认椅面3处于机械爪4-4可抓取范围。
27.具体的工作原理为:传感器1-1检测到椅面3上没有人坐着后,将信号提供给转向电机2-6,抬升杆2-5将转向盘2-3和连接在其底部的定向轮2-4弹出,使定向轮2-4与地面滚动接触。位置检测器2-2将与桌子4内的检测装置4-2感应,然后将桌子4的位置信号传输给转向电机2-6,转向电机2-6调整转向盘2-3的方向,即定向轮2-4的方向,并驱动其往桌子4的方向移动,然后座椅的外壳2-1将会与圆弧形的限位槽接触,辅助其最终其移动至大致指定的位置上,此后,桌底检测器4-5将与抬升模块中的传感器1-1相感应,将更加精确的位置信号传输给转向电机2-6,转向电机2-6再次调整定向轮2-4的方向,最后将移动到指定位置使得椅面3的中心对准桌底检测器4-5。然后传感器1-1将信号发送给转向电机2-6和电推杆1-2。转向电机2-6驱动抬升杆2-5将转向盘2-3和连接在其底部的定向轮2-4收回。抬升电机1-3驱动电推杆1-2向上抬升,同时带动椅面3抬升,当桌底检测器4-5检测到椅面3与其到达指定距离后,将发出信号给钩爪4-4使其夹住椅面。同时桌底检测器4-5还将发送信号给传感器1-1,然后传感器1-1信号传输给抬升电机1-3不再抬升椅面3,而是驱动底部的移动模块2抬升,使得餐椅成功归位,至此本实例结束。
28.本说明书实施例所述的内容仅仅是对实用新型构思的实现形式的列举,本实用新型的保护范围不应当被视为仅限于实施例所陈述的具体形式,本实用新型的保护范围也及于本领域技术人员根据本实用新型构思所能够想到的等同技术手段。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1