清洁机器人电动刷的制作方法
1.本实用新型涉及家用机器人技术领域,具体地,涉及清洁机器人电动刷。
背景技术:
2.随着科技的不断进步以及劳动力成本的不断增加,越来越多代替传统劳动力的机器人出现在人们的视野。室内清洁,尤其在酒店应用场景,需要快速有效的清洁,对于配合机械手,传统的刷子效率慢且没有科技感,效率大大折扣。市场上常见的电动刷频繁充电,按压开关启动等操作,极其繁琐,并不适合机器人的操作及其使用。因此设计一种清洁效果好,搭配机械手的电动清洁刷,是清洁机器人产品的推广发展需要解决的问题。
3.经现有技术专利文献检索发现,中国实用新型专利公开号为cn210747861u,公开了一种可拆卸式电动刷头,属于电动刷头领域,设计合理,操作简单,本装置能够实现可拆卸。包括刷头主体和毛刷束,所述刷头主体底部固定连接有毛刷束,所述电动刷头还包括六角传动轴、螺纹柱和螺帽,所述刷头主体顶部固定连接有连接块,所述连接块为一个圆环,所述螺帽固定连接在所述连接块内,所述六角传动轴底部固定连接螺纹柱。而本实用新型提供了清洁机器人电动刷。因此,该文献与本实用新型所介绍的方法是属于不同的发明构思。
技术实现要素:
4.针对现有技术中的缺陷,本实用新型的目的是提供一种清洁机器人电动刷。
5.根据本实用新型提供的一种清洁机器人电动刷,包括清洁球、轴套、马达组件、导电弹pin组件以及机械臂,清洁球上设有金属轴,金属轴通过磁铁连接轴套,轴套连接马达组件上的马达轴,马达组件通过导电弹pin组件连接机械臂。
6.一些实施例中,导电弹pin组件包括导电弹pin、后盖、导电铆钉、机械臂夹板压板以及机械臂夹板,导电弹pin、导电铆钉、机械臂夹板压板以及机械臂夹板连接于后盖内,导电弹pin固定于后盖的针孔内,导电铆钉压入机械臂夹板压板的固定孔中,机械臂夹板压板连接于机械臂夹板上。
7.一些实施例中,导电弹pin通过马达焊接件连接马达组件。
8.一些实施例中,后盖包括上后盖、下后盖以及支撑柱,导电弹pin分别连接于上后盖和下后盖的连接孔内,上后盖通过支撑柱连接下后盖。
9.一些实施例中,机械臂上引出的导电线连接导电铆钉。
10.一些实施例中,机械臂夹板中间连接有定位pin。
11.一些实施例中,定位pin与上后盖上的凹坑定位连接。
12.一些实施例中,当机械臂夹板夹紧时,导电铆钉压住导电弹pin。
13.一些实施例中,机械臂夹板、机械臂夹板压板以及导电铆钉一一对应连接。
14.一些实施例中,轴套、马达组件以及导电弹pin组件依次连接于机械臂内部。
15.与现有技术相比,本实用新型具有如下的有益效果:
16.(1)本实用新型中定位pin和凹坑实现精准定位,配合导电铆钉压住导电弹pin,通过机器人控制实现通电断电,无需频繁充电,按压开关,易于机器人操作;
17.(2)本实用新型金属轴通过磁铁与轴套连接,能快速实现清洁球的更换,方便操作。
附图说明
18.通过阅读参照以下附图对非限制性实施例所作的详细描述,本实用新型的其它特征、目的和优点将会变得更明显:
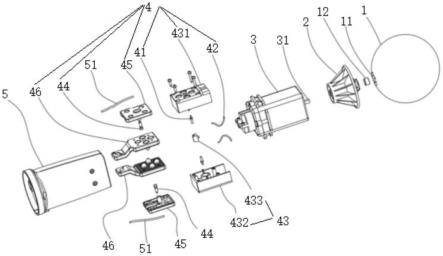
19.图1为本实用新型的爆炸图;
20.图2为本实用新型导电弹pin组件的爆炸图。
21.图中标号:
22.清洁球1、金属轴11、磁铁12、轴套2、马达组件3、导电弹pin组件4、导电弹pin41、马达焊接件42、后盖43、上后盖431、下后盖432、支撑柱433、凹坑434、连接孔435、导电铆钉44、机械臂夹板压板45、固定孔451、机械臂夹板46、定位pin461、机械臂5、导电线51。
具体实施方式
23.下面结合具体实施例对本实用新型进行详细说明。以下实施例将有助于本领域的技术人员进一步理解本实用新型,但不以任何形式限制本实用新型。应当指出的是,对本领域的普通技术人员来说,在不脱离本实用新型构思的前提下,还可以做出若干变化和改进。这些都属于本实用新型的保护范围。
24.实施例
25.本实用新型提供的一种清洁机器人电动刷,包括清洁球1、轴套2、马达组件3、导电弹pin组件4以及机械臂5,清洁球1上设有金属轴11,金属轴11通过磁铁12连接轴套2,轴套2连接马达组件3上的马达轴31,马达组件3通过导电弹pin组件4连接机械臂5。轴套2、马达组件3以及导电弹pin组件4依次连接于机械臂5内部。
26.导电弹pin组件4包括导电弹pin41、马达焊接件42、后盖43、导电铆钉44、机械臂夹板压板45以及机械臂夹板46,导电弹pin41、导电铆钉44、机械臂夹板压板45以及机械臂夹板46连接于后盖43内,导电弹pin41通过马达焊接件42连接马达组件4,导电弹pin41固定于后盖43的针孔内,导电铆钉44压入机械臂夹板压板45的固定孔451中,且导电铆钉44与机械臂5上引出的导电线51相连接。优选的,导电铆钉44焊接连接导电线51。机械臂夹板压板45连接于机械臂夹板46上,机械臂夹板46中间连接有定位pin461,定位pin461与上后盖431上的凹坑434定位连接。当机械臂夹板46夹紧时,导电铆钉44压住导电弹pin41。
27.后盖43包括上后盖431、下后盖432以及支撑柱433,导电弹pin41分别连接于上后盖431和下后盖432的连接孔435内,上后盖431通过支撑柱433与下后盖432,通过螺钉将机械臂夹板46固定于上后盖431和下后盖432内。
28.更为具体的,本实施例中,机械臂夹板46、机械臂夹板压板45以及导电铆钉44的数量为两个,且机械臂夹板46、机械臂夹板压板45以及导电铆钉44一一对应连接。
29.综上所述,机械臂夹板46的定位pin461与电动刷外观的凹坑434配合实现准确定位,当夹板夹紧时,导电铆钉44会压住导电弹pin41,此时可通过机器人控制实现通电断电,
在需要清洁情况下,给电动刷供电,实现清洁的操作。磁铁12固定在轴套2上,轴套2与马达组件3的马达轴31进行配合,清洁球1内的金属轴11吸附磁铁12,实现清洁球的快速更换。
30.在本申请的描述中,需要理解的是,术语“上”、“下”、“前”、“后”、“左”、“右”、“竖直”、“水平”、“顶”、“底”、“内”、“外”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本申请和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本申请的限制。
31.以上对本实用新型的具体实施例进行了描述。需要理解的是,本实用新型并不局限于上述特定实施方式,本领域技术人员可以在权利要求的范围内做出各种变化或修改,这并不影响本实用新型的实质内容。在不冲突的情况下,本申请的实施例和实施例中的特征可以任意相互组合。
技术特征:
1.一种清洁机器人电动刷,其特征在于,包括清洁球(1)、轴套(2)、马达组件(3)、导电弹pin组件(4)以及机械臂(5),所述清洁球(1)上设有金属轴(11),所述金属轴(11)通过磁铁(12)连接所述轴套(2),所述轴套(2)连接所述马达组件(3)上的马达轴(31),所述马达组件(3)通过所述导电弹pin组件(4)连接所述机械臂(5)。2.根据权利要求1所述的清洁机器人电动刷,其特征在于,所述导电弹pin组件(4)包括导电弹pin(41)、后盖(43)、导电铆钉(44)、机械臂夹板压板(45)以及机械臂夹板(46),所述导电弹pin(41)、所述导电铆钉(44)、所述机械臂夹板压板(45)以及所述机械臂夹板(46)连接于所述后盖(43)内,所述导电弹pin(41)固定于后盖(43)的针孔内,所述导电铆钉(44)压入所述机械臂夹板压板(45)的固定孔(451)中,所述机械臂夹板压板(45)连接于所述机械臂夹板(46)上。3.根据权利要求2所述的清洁机器人电动刷,其特征在于,所述导电弹pin(41)通过马达焊接件(42)连接所述马达组件(3)。4.根据权利要求2所述的清洁机器人电动刷,其特征在于,所述后盖(43)包括上后盖(431)、下后盖(432)以及支撑柱(433),所述导电弹pin(41)分别连接于所述上后盖(431)和所述下后盖(432)的连接孔(435)内,所述上后盖(431)通过所述支撑柱(433)连接所述下后盖(432)。5.根据权利要求2所述的清洁机器人电动刷,其特征在于,所述机械臂(5)上引出的导电线(51)连接所述导电铆钉(44)。6.根据权利要求4所述的清洁机器人电动刷,其特征在于,所述机械臂夹板(46)中间连接有定位pin(461)。7.根据权利要求6所述的清洁机器人电动刷,其特征在于,所述定位pin(461)与所述上后盖(431)上的凹坑(434)定位连接。8.根据权利要求2所述的清洁机器人电动刷,其特征在于,当所述机械臂夹板(46)夹紧时,所述导电铆钉(44)压住所述导电弹pin(41)。9.根据权利要求2所述的清洁机器人电动刷,其特征在于,所述机械臂夹板(46)、所述机械臂夹板压板(45)以及所述导电铆钉(44)一一对应连接。10.根据权利要求1所述的清洁机器人电动刷,其特征在于,所述轴套(2)、所述马达组件(3)以及所述导电弹pin组件(4)依次连接于所述机械臂(5)内部。
技术总结
本实用新型提供了一种涉及家用机器人技术领域的清洁机器人电动刷,包括清洁球、轴套、马达组件、导电弹pin组件以及机械臂,清洁球上设有金属轴,金属轴通过磁铁连接轴套,轴套连接马达组件上的马达轴,马达组件通过导电弹pin组件连接机械臂。本实用新型中定位pin和凹坑实现精准定位,配合导电铆钉压住导电弹pin,通过机器人控制实现通电断电,无需频繁充电,按压开关,易于机器人操作;本实用新型金属轴通过磁铁与轴套连接,能快速实现清洁球的更换,方便操作。方便操作。方便操作。
技术研发人员:赵龙 郭震
受保护的技术使用者:上海景吾酷租科技发展有限公司
技术研发日:2022.01.17
技术公布日:2022/9/5
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1