一种多角度全自动化磁吸附的智能擦玻璃机器人的制作方法
1.本实用新型涉及擦玻璃机器人技术领域,具体为一种多角度全自动化磁吸附的智能擦玻璃机器人。
背景技术:
2.擦玻璃机器人,是智能家用电器的一种,需带电工作的电器,以方形构造为主,方便清理玻璃的边角区域,随着国内生活水平的不断提高,原本一直在欧美市场销售的擦玻璃机器人也逐步的走入平常百姓家,并且逐步的被越来越多的人所接受,擦玻璃机器人将在不久的将来像白色家电一样成为每个家庭必不可少的清洁帮手,产品也会由初级智能向着更高程度的智能化程度发展,逐步的取代人工清洁;擦玻璃机器人使用的过程中遇到复杂结构的玻璃时无法进行全面清理,难以调节进行多边和多角度的深入操作,耗费时间影响作业进程,为此我们提出了一种多角度全自动化磁吸附的智能擦玻璃机器人。
技术实现要素:
3.(一)解决的技术问题
4.针对现有技术的不足,本实用新型提供了一种多角度全自动化磁吸附的智能擦玻璃机器人,具备多边多角度灵活深入操作,方便安装容易拆除,节约时间提高作业效率等优点,解决了擦玻璃机器人使用的过程中遇到复杂结构的玻璃时无法进行全面清理,难以调节进行多边和多角度的深入操作,耗费时间影响作业进程的问题。
5.(二)技术方案
6.为实现上述目的,本实用新型提供如下技术方案:一种多角度全自动化磁吸附的智能擦玻璃机器人,包括机器人主机和随动器,所述机器人主机侧边安装有动力轮,所述机器人主机侧边固定连接有永磁块,所述机器人主机侧边固定连接有电磁块,所述机器人主机侧边设置有抹布圈,所述随动器侧边安装有移动轮,所述随动器侧边固定连接有永磁感应块,所述随动器侧边固定连接有电磁感应块,所述机器人主机侧边设置有置入槽,所述置入槽内部插接有辅助条,所述辅助条内部螺纹连接有旋钮固定件,所述辅助条侧边设置有抹布条,所述机器人主机侧边安装有防护架。
7.优选的,所述防护架与旋钮固定件相连接,所述旋钮固定件与机器人主机相连接,旋钮固定件贯穿防护架连接到机器人主机内部,完成防护架在机器人主机侧边的安装。
8.优选的,所述防护架内部螺纹连接有螺栓件,所述螺栓件侧边固定连接有弹簧器,所述弹簧器侧边固定连接有防护垫,防护架侧边有多个弹簧器和防护垫,通过防护架、弹簧器和防护垫加强机器人主机侧边防护性能。
9.优选的,所述机器人主机侧边安装有激光导航传感器,所述机器人主机侧边设置有超声波传感器,机器人主机借助激光导航传感器和超声波传感器进行路线规划和临时调整,避开障碍物,深入边角全面清理。
10.优选的,所述防护架安装在随动器侧边,所述旋钮固定件与随动器相连接,旋钮固
定件贯穿防护架连接到随动器内部,完成防护架在随动器侧边的安装。
11.优选的,所述辅助条有多个,多个所述辅助条到达机器人主机中心点的距离相等,多个辅助条在机器人主机边角位置,多个辅助条九十度角分布。
12.与现有技术相比,本实用新型提供了一种多角度全自动化磁吸附的智能擦玻璃机器人,具备以下有益效果:
13.1、该多角度全自动化磁吸附的智能擦玻璃机器人,通过机器人主机、随动器、动力轮、永磁块、电磁块、抹布圈、移动轮、永磁感应块、电磁感应块、置入槽、辅助条、旋钮固定件和抹布条等部分的连接和作用,机器人主机安装动力轮,机器人主机与永磁块和电磁块相连接,机器人主机和随动器设置抹布圈,随动器安装移动轮,随动器与永磁感应块和电磁感应块相连接,机器人主机设置置入槽,置入槽与辅助条插接作用,旋钮固定件与机器人主机和辅助条相连接,辅助条设置抹布条,达到多边多角度灵活深入操作,方便安装容易拆除,节约时间提高作业效率的效果。
14.2、该多角度全自动化磁吸附的智能擦玻璃机器人,通过机器人主机、随动器、旋钮固定件、防护架、螺栓件、弹簧器和防护垫等部分的连接和作用,机器人主机、随动器和防护架与旋钮固定件相连接,旋钮固定件贯穿防护架连接到机器人主机内部,旋钮固定件贯穿防护架连接到随动器内部,防护架与螺栓件相连接,螺栓件与弹簧器相连接,弹簧器与防护垫相连接,达到有效防护保障安全,快捷组装快速使用,减少损失延长设备使用寿命的效果。
附图说明
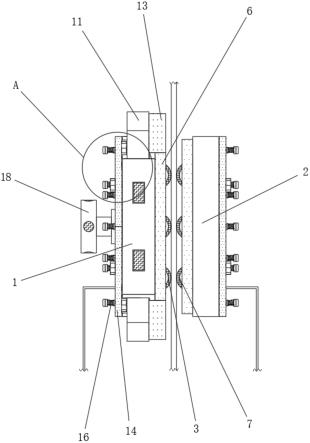
15.图1为本实用新型结构前视图;
16.图2为本实用新型图1中a处放大图;
17.图3为本实用新型机器人主机左视图;
18.图4为本实用新型机器人主机右视图;
19.图5为本实用新型随动器左视图。
20.其中:1、机器人主机;2、随动器;3、动力轮;4、永磁块;5、电磁块;6、抹布圈;7、移动轮;8、永磁感应块;9、电磁感应块;10、置入槽;11、辅助条;12、旋钮固定件;13、抹布条;14、防护架;15、螺栓件;16、弹簧器;17、防护垫;18、激光导航传感器;19、超声波传感器。
具体实施方式
21.下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本实用新型一部分实施例,而不是全部的实施例。基于本实用新型中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本实用新型保护的范围。
22.请参阅图1-5,一种多角度全自动化磁吸附的智能擦玻璃机器人,包括机器人主机1和随动器2,机器人主机1连线电源线路,随动器2连接牵引绳,机器人主机1侧边安装有激光导航传感器18,机器人主机1侧边设置有超声波传感器19,激光导航传感器18在机器人主机1侧边可进行伸缩打开,激光导航传感器18通过发射光和反馈,构建反射物的轮廓,通过轮廓来对比这个物体大致的现实产品,超声波传感器19根据测量发射波与反射波之间的时
间间隔,从而达到测量距离的作用,机器人主机1借助激光导航传感器18和超声波传感器19进行路线规划和临时调整,避开障碍物,深入边角全面清理,机器人主机1侧边安装有动力轮3,动力轮3与机器人主机1连接处有旋转装置,进行动力轮3方向的改变,机器人主机1侧边固定连接有永磁块4,机器人主机1侧边固定连接有电磁块5,机器人主机1侧边设置有抹布圈6,随动器2侧边也设置抹布圈6,随动器2侧边安装有移动轮7,随动器2侧边固定连接有永磁感应块8,随动器2侧边固定连接有电磁感应块9,机器人主机1侧边设置有置入槽10,置入槽10内部插接有辅助条11,辅助条11有多个,多个辅助条11到达机器人主机1中心点的距离相等,多个辅助条11在机器人主机1边角位置,多个辅助条11九十度角分布,辅助条11内部螺纹连接有旋钮固定件12,辅助条11侧边设置有抹布条13,通过机器人主机1、随动器2、动力轮3、永磁块4、电磁块5、抹布圈6、移动轮7、永磁感应块8、电磁感应块9、置入槽10、辅助条11、旋钮固定件12和抹布条13等部分的连接和作用,机器人主机1安装动力轮3,机器人主机1与永磁块4和电磁块5相连接,机器人主机1和随动器2设置抹布圈6,随动器2安装移动轮7,随动器2与永磁感应块8和电磁感应块9相连接,机器人主机1设置置入槽10,置入槽10与辅助条11插接作用,旋钮固定件12与机器人主机1和辅助条11相连接,辅助条11设置抹布条13,达到多边多角度灵活深入操作,方便安装容易拆除,节约时间提高作业效率的效果,机器人主机1侧边安装有防护架14,防护架14与旋钮固定件12相连接,旋钮固定件12与机器人主机1相连接,旋钮固定件12贯穿防护架14连接到机器人主机1内部,完成防护架14在机器人主机1侧边的安装,防护架14内部螺纹连接有螺栓件15,螺栓件15侧边固定连接有弹簧器16,弹簧器16侧边固定连接有防护垫17,防护架14侧边有多个弹簧器16和防护垫17,通过防护架14、弹簧器16和防护垫17增强机器人主机1侧边防护性能,防护架14安装在随动器2侧边,旋钮固定件12与随动器2相连接,旋钮固定件12贯穿防护架14连接到随动器2内部,完成防护架14在随动器2侧边的安装,通过机器人主机1、随动器2、旋钮固定件12、防护架14、螺栓件15、弹簧器16和防护垫17等部分的连接和作用,机器人主机1、随动器2和防护架14与旋钮固定件12相连接,旋钮固定件12贯穿防护架14连接到机器人主机1内部,旋钮固定件12贯穿防护架14连接到随动器2内部,防护架14与螺栓件15相连接,螺栓件15与弹簧器16相连接,弹簧器16与防护垫17相连接,达到有效防护保障安全,快捷组装快速使用,减少损失延长设备使用寿命的效果。
23.在使用时,辅助条11插接到置入槽10内部,获取两个旋钮固定件12,两个旋钮固定件12顺时针方向螺纹进入到辅助条11,两个旋钮固定件12贯彻辅助条11螺纹连接到机器人主机1内部,完成一个辅助条11的安装,参考此操作完成多个辅助条11的安装,获取螺栓件15、弹簧器16和防护垫17的整体件,螺栓件15顺时针方向螺纹连接进入到防护架14内部,同样操作多个螺栓件15、弹簧器16和防护垫17的整体件,完成多个螺栓件15、弹簧器16和防护垫17在防护架14侧边的连接安装,参考此操作完成多个螺栓件15、弹簧器16和防护垫17在另一个防护架14的连接安装,其中一个防护架14靠近机器人主机1没有动力轮3的一侧,获取多个旋钮固定件12,多个旋钮固定件12贯穿防护架14螺纹连接到机器人主机1内部,完成防护架14在机器人主机1侧边的安装,另一个防护架14靠近随动器2没有移动轮7的一侧,获取多个旋钮固定件12,多个旋钮固定件12贯穿防护架14螺纹连接到随动器2内部,完成防护架14在随动器2侧边的安装,快捷组装快速使用;将机器人主机1置于玻璃内侧,将随动器2置于玻璃外侧,永磁块4对应永磁感应块8,电磁块5对应电磁感应块9,永磁块4磁力直接吸
附永磁感应块8,完成机器人主机1和随动器2初步吸附,机器人主机1接通电源线路,电磁块5产生吸力直接吸附电磁感应块9,完成机器人主机1和随动器2进一步吸附,动力轮3运行带动机器人主机1移动,机器人主机1作用到随动器2,随动器2通过移动轮7同时移动,机器人主机1借助激光导航传感器18进行路线规划,机器人主机1正常清理作业,机器人主机1设置的抹布圈6清理擦拭玻璃内侧,随动器2设置的抹布圈6清理擦拭玻璃外侧,当遇到边角位置,超声波传感器19反馈障碍物信息,测定距离,机器人主机1控制动力轮3做出方向和位置改变,使辅助条11靠近边角位置,辅助条11设置的抹布条13进行边角位置的清理擦拭,完成多边多角度灵活深入操作;当机器人主机1和随动器2受到外力冲击时,或不当操作使机器人主机1和随动器2脱离玻璃侧边掉落时,多个防护垫17首先与外物接触,多个防护垫17传输力量到达弹簧器16,弹簧器16受压收缩回弹,均衡分配并对外力进行抵消,通过防护架14、弹簧器16和防护垫17增强机器人主机1和随动器2侧边防护性能,减少损失延长设备使用寿命。
24.尽管已经示出和描述了本实用新型的实施例,对于本领域的普通技术人员而言,可以理解在不脱离本实用新型的原理和精神的情况下可以对这些实施例进行多种变化、修改、替换和变型,本实用新型的范围由所附权利要求及其等同物限定。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1