手持终端、清洁机器人、基站以及系统的制作方法
本技术涉及机器人,尤其涉及一种手持终端、清洁机器人、基站以及系统。
背景技术:
1、具有建图能力的家用清洁机器人除了进行全屋清洁或者指定范围清洁之外,开始增加一个新的功能,即在地图上指定某一个位置,让清洁机器人只去该位置附近进行指定范围的清洁。
2、目前的已有方案都是基于手机app上的地图来进行的。用户当需要进行清洁时,需要在手机上打开扫地机器人对应的app应用,在该应用中打开之前建立的地图,用手在地图上指定某一个待清洁的坐标点位置,从而命令清洁机器人去往该位置进行清洁动作。
3、上述过程相当繁琐,而且对于使用者来说,还需要思考一下,找出实际家庭中待清洁的位置在手机app的地图上的坐标点,再进行操作。这个过程显然非常不直观。
技术实现思路
1、本实用新型的主要目的在于提供一种手持终端、清洁机器人、基站以及系统,旨在解决现有技术中清洁机器人清洁时使用不方便技术问题。
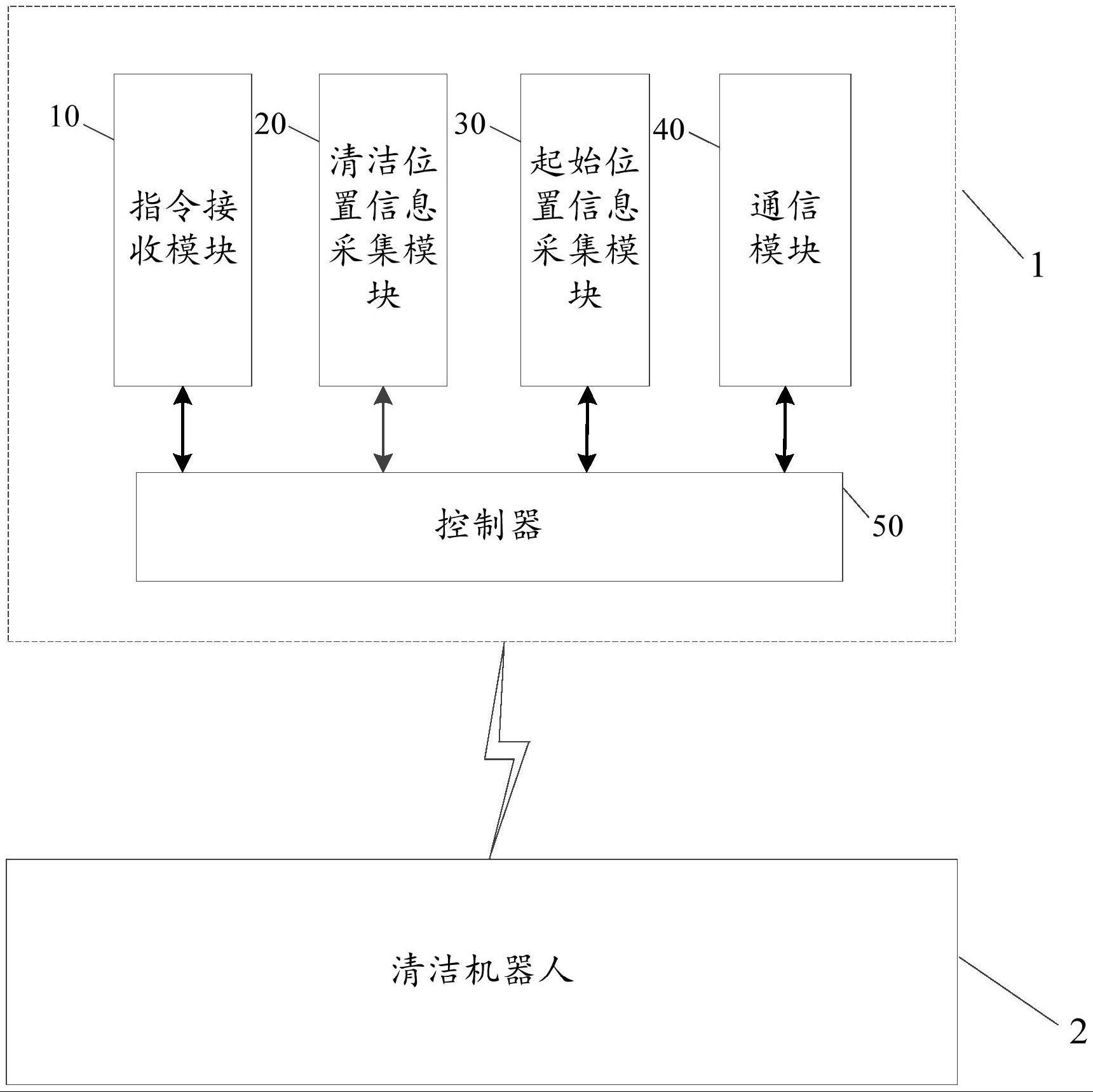
2、为实现上述目的,本实用新型提出一种手持终端,手持终端包括:指令接收模块、清洁位置信息采集模块、起始位置信息采集模块、通信模块以及控制器,所述指令接收模块、所述清洁位置信息采集模块、所述起始位置信息采集模块以及所述通信模块分别与所述控制器连接;
3、所述指令接收模块,用于接收指令信息,并将所述指令信息发送至所述控制器;
4、所述控制器,用于在接收所述指令信息时,控制所述清洁位置信息采集模块采集与目标清洁位置相关的第一信息,并控制所述起始位置信息采集模块采集与清洁机器人起始位置相关的第二信息;
5、所述通信模块,用于将所述第一信息和所述第二信息发送至清洁机器人。
6、可选地,所述第一信息包括:第一距离和对地倾斜角;
7、所述清洁位置信息采集模块包括:距离采集单元和角度采集单元,所述距离采集单元和所述角度采集单元分别与所述控制器连接;
8、所述距离采集单元,用于采集与所述目标清洁位置的第一距离;
9、所述角度采集单元,用于采集与所述目标清洁位置的对地倾角。
10、可选地,所述距离采集单元包括:测距芯片、第一电容以及第二电容;
11、所述测距芯片的第一接口分别与所述第一电容的第一端和所述第二电容的第一端连接,所述测距芯片的第二接口和第三接口分别与所述控制器连接,所述测距芯片的第四接口、第五接口以及第六接口接地;
12、所述第一电容的第二端和所述第二电容的第二端接地。
13、可选地,所述角度采集单元包括:角度测量芯片、第三电容、第一电阻、第二电阻以及第三电阻;
14、所述角度测量芯片的第一接口与所述第一电阻的第一端连接,所述角度芯片的第二接口和第三接口分别与所述控制器连接,所述角度测量芯片的第四接口和第五接口接地,所述角度测量芯片的第六接口与所述第三电容的第一端连接,所述角度测量芯片的第七接口与所述第二电阻的第一端连接,所述角度测量芯片的第八接口与所述第三电阻的第一端连接;
15、所述第三电容的第二端接地;
16、所述第二电阻的第二端和所述第三电阻的第二端分别与所述角度测量芯片的第九接口连接。
17、可选地,所述第二信息包括:第二距离和相对角度;
18、所述起始位置信息采集模块包括:超宽带模组,所述超宽带模组与所述控制器连接;
19、所述超宽带模组,用于采集与清洁机器人起始位置之间的第二距离和相对角度。
20、可选地,所述超宽带模组包括:第一处理单元、第一信号发送单元、第一信号接收单元和第二信号接收单元,所述第一信号发送单元、所述第一信号接收单元以及所述第二信号接收单元分别与所述第一处理单元连接;
21、所述第一信号发送单元,用于向所述清洁机器人发送交互信号,以使所述清洁机器人在接收到所述交互信号后,发送反馈信号;
22、所述第一信号接收单元和所述第二信号接收单元,用于接收所述反馈信号;
23、所述第一处理单元,用于接收所述第一信号接收单元和所述第二信号接收单元的反馈信号,以确定所述第二距离和所述相对角度。
24、可选地,所述指令接收模块包括:按键单元、语音接收单元或触摸感应单元。
25、此外,为实现上述目的,本实用新型还提出一种清洁机器人,清洁机器人包括:第二处理单元、第二信号发送单元以及第三信号接收单元,所述第二信号发送单元和所述第三信号接收单元与所述第二处理单元连接;
26、所述第三信号接收单元用于接收上述的手持终端发送的交互信号;
27、所述第二信号发送单元用于向上述的手持终端发送反馈信号。
28、此外,为实现上述目的,本实用新型还提出一种基站,基站包括第二处理单元、第二信号发送单元以及第三信号接收单元,所述第二信号发送单元和所述第三信号接收单元与所述第二处理单元连接;
29、所述第三信号接收单元用于接收上述的手持终端发送的交互信号;
30、所述第二信号发送单元用于向上述的手持终端发送反馈信号。
31、此外,为实现上述目的,本实用新型还提出一种系统,系统包括上文所述的手持终端以及清洁机器人。
32、在本实用新型中,手持终端包括:指令接收模块、清洁位置信息采集模块、起始位置信息采集模块、通信模块以及控制器,所述指令接收模块、所述清洁位置信息采集模块、所述起始位置信息采集模块以及所述通信模块分别与所述控制器连接;所述指令接收模块,用于接收指令信息,并将所述指令信息发送至所述控制器;所述控制器,用于在接收到所述指令信息时,控制所述清洁位置信息采集模块采集与目标清洁位置相关的第一信息,并控制所述起始位置信息采集模块采集与清洁机器人起始位置相关的第二信息;所述通信模块,用于将所述第一信息和所述第二信息发送至清洁机器人。用户利用本实用新型中的手持终端指向需要清洁的目标位置即可实现快速的定点清洁,整个清洁过程非常简单,清洁速度快,提升用户体验。
技术特征:
1.一种手持终端,其特征在于,所述手持终端包括:指令接收模块、清洁位置信息采集模块、起始位置信息采集模块、通信模块以及控制器,所述指令接收模块、所述清洁位置信息采集模块、所述起始位置信息采集模块以及所述通信模块分别与所述控制器连接;
2.如权利要求1所述的手持终端,其特征在于,所述第一信息包括:第一距离和对地倾斜角;
3.如权利要求2所述的手持终端,其特征在于,所述距离采集单元包括:测距芯片、第一电容以及第二电容;
4.如权利要求2所述的手持终端,其特征在于,所述角度采集单元包括:角度测量芯片、第三电容、第一电阻、第二电阻以及第三电阻;
5.如权利要求1所述的手持终端,其特征在于,所述第二信息包括:第二距离和相对角度;
6.如权利要求5所述的手持终端,其特征在于,所述超宽带模组包括:第一处理单元、第一信号发送单元、第一信号接收单元和第二信号接收单元,所述第一信号发送单元、所述第一信号接收单元以及所述第二信号接收单元分别与所述第一处理单元连接;
7.如权利要求1-6中任一项所述的手持终端,其特征在于,所述指令接收模块包括:按键单元、语音接收单元或触摸感应单元。
8.一种清洁机器人,其特征在于,所述清洁机器人包括:第二处理单元、第二信号发送单元以及第三信号接收单元,所述第二信号发送单元和所述第三信号接收单元与所述第二处理单元连接;
9.一种基站,其特征在于,所述基站包括第二处理单元、第二信号发送单元以及第三信号接收单元,所述第二信号发送单元和所述第三信号接收单元与所述第二处理单元连接;
10.一种系统,其特征在于,所述系统包括上述权利要求1-7中任一项所述的手持终端和上述权利要求8所述的清洁机器人。
技术总结
本技术公开了一种手持终端、清洁机器人、基站以及系统。手持终端包括:指令接收模块、清洁位置信息采集模块、起始位置信息采集模块、通信模块以及控制器,指令接收模块,用于接收指令信息,并将指令信息发送至控制器;控制器,用于在接收指令信息时,控制清洁位置信息采集模块采集与目标清洁位置相关的第一信息,并控制起始位置信息采集模块采集与清洁机器人起始位置相关的第二信息;通信模块,用于将第一信息和第二信息发送至清洁机器人,手持终端、清洁机器人、基站以及系统通过得到与目标清洁位置相关的第一信息和与清洁机器人起始位置相关的第二信息对目标清洁位置进行清洁,清洁速度快,提升用户体验。
技术研发人员:何世友,杭大明
受保护的技术使用者:深圳市倍思科技有限公司
技术研发日:20220421
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!