清洁设备的基站、控制方法、控制装置及清洁系统与流程
本发明属于智能家居,具体涉及一种清洁设备的基站。本发明还涉及一种上述清洁设备的基站控制方法。本发明还涉及一种实现上述控制方法的控制装置。本发明还涉及一种实现上述控制方法的清洁系统。
背景技术:
1、随着科技水平的提高,现代家庭为了提高生活舒适度,开始引入智能家居。扫地机器人是智能家电的一种,能凭借人工智能,自动在房间内完成地板清理工作,减小了住户的清洁负担。
2、现有的扫地机器人通常与基站配合使用,通过基站为扫地机器人提供充电、清洁等服务。然而,由于扫地机器人通常需要能够清洁狭窄环境,这就导致了扫地机器人的体积需要小型化的需求,进而使扫地机器人的电量续航能力和清扫续航能力不高。
3、通常扫地机器人在使用过程中需要多次回基站充电或清理垃圾或清洗拖布,受限于基站的位置,扫地机器人的作业范围有限。当作业范围较大时,扫地机器人往返基站会浪费大量时间和能量。
技术实现思路
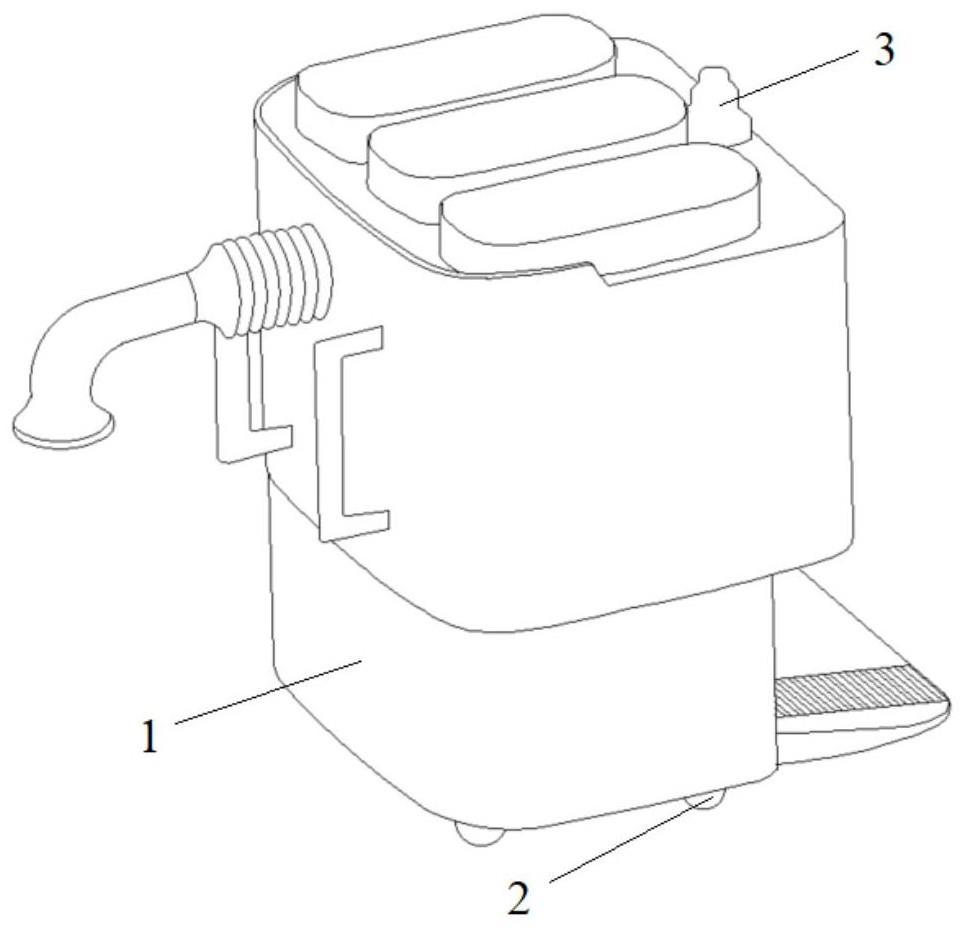
1、为了提高扫地机器人的作业效率,避免浪费过多的能量和时间,本发明提供了一种清洁设备的基站,包括:
2、机体,所述机体上设置有充电仓,用于容纳清洁设备;
3、移动机构,所述移动机构设置在所述机体上,用于驱动基站移动;
4、定位机构,所述定位机构设置在所述机体上,用于获取清洁设备的位置;
5、续航系统,所述续航系统设置在所述充电仓内。
6、根据本发明提供的清洁设备的基站,所述移动机构包括移动轮组或履带,通过所述移动轮组或所述履带用于驱动所述基站移动。
7、根据本发明提供的清洁设备的基站,所述定位机构包括激光雷达,所述基站通过所述激光雷达传递当前位置信号,和/或获取所述清洁设备的当前位置信号。
8、根据本发明提供的清洁设备的基站,所述续航系统包括储电模块和电极片,所述电极片和所述储电模块连接,且所述电极片为红外充电极片,能够发射红外线,以使所述清洁设备对准所述电极片进行充电。
9、本发明还提供了一种实现上述清洁设备的基站控制方法,包括:
10、获取基站的第一位置参数和清洁设备的第二位置参数;
11、根据所述第一位置参数和所述第二位置参数生成位置调整策略;
12、根据所述位置调整策略调节所述基站和所述清洁设备的相对位置,以实现通过所述基站为所述清洁设备充电。
13、根据本发明提供的控制方法,所述获取基站的第一位置参数和清洁设备的第二位置参数的步骤,具体包括:
14、获取所述清洁设备作业环境的虚拟空间模型;
15、获取所述基站在所述虚拟空间模型内的基站位置坐标,并根据所述基站位置坐标生成所述第一位置参数;
16、获取所述清洁设备在所述虚拟空间模型内的设备位置坐标,并根据所述设备位置坐标生成所述第二位置参数。
17、根据本发明提供的控制方法,所述根据所述第一位置参数和所述第二位置参数生成位置调整策略的步骤,具体包括:
18、获取所述基站的识别区域,并根据所述第一位置参数和所述第二位置参数确定所述基站和所述清洁设备的识别距离;
19、确定所述基站和所述清洁设备处于所述识别距离内,则获取所述识别区域内的识别信息;
20、根据所述识别信息调整所述基站和所述清洁设备的相对位置。
21、根据本发明提供的控制方法,所述根据所述识别信息调整所述基站和所述清洁设备的相对位置的步骤,具体包括:
22、获取所述基站的充电仓入口朝向,以及所述清洁设备的行进轨迹;
23、根据所述充电仓的入口朝向和所述行进轨迹生成所述识别信息;
24、根据预设采集时长连续采集所述行进轨迹,并更新所述识别信息。
25、根据本发明提供的控制方法,所述通过所述基站为所述清洁设备充电的步骤,具体包括:
26、确定所述清洁设备进入所述识别区域,所述基站持续发射充电匹配信息;
27、确定接收到所述清洁设备和所述基站充电匹配到位信号后,所述清洁设备停止移动,所述基站向所述清洁设备进行充电,其中,所述清洁设备进入所述充电仓后,向所述基站反馈所述充电匹配到位信号。
28、本发明还提供了一种实现上述控制方法的控制装置,包括:
29、获取模块,用于获取基站的第一位置参数和清洁设备的第二位置参数;
30、判断模块,用于根据所述第一位置参数和所述第二位置参数生成位置调整策略;
31、执行模块,用于根据所述位置调整策略调节所述基站和所述清洁设备的相对位置,以实现通过所述基站为所述清洁设备充电。
32、本发明还提供了一种实现上述控制方法的清洁系统,包括:
33、上述所述的清洁设备的基站,和/或上述所述的清洁设备的基站的控制装置,并能够实现上述所述的清洁设备的基站控制方法的步骤。
34、本发明的有益效果:
35、本发明提供了一种清洁设备的基站,能够通过获取基站的第一位置参数和清洁设备的第二位置参数,生成基站和移动设备相对位置的调整策略,从而方便清洁设备回基站中清洗或者充电,提高了清洁设备的作业范围和作业效率,避免因来回往返基站而浪费过多的能量和时间。
36、本发明提供的清洁设备的基站中,基站通过移动机构可以主动靠近并跟随清洁设备的作业位置,而无需清洁设备多次往返至基站中,节省了清洁设备扫地清洁的时间,从而提高了清洁设备的清洁能力与效率。尤其对于作业面积较大的工况,相比于体积较小的清洁设备,基站的续航系统能够携带更为充足的电量,从而提高了整体续航能力。
技术特征:
1.一种清洁设备的基站,其特征在于,包括:
2.根据权利要求1所述的清洁设备的基站,其特征在于,所述移动机构(2)包括移动轮组或履带,通过所述移动轮组或所述履带用于驱动所述基站移动。
3.根据权利要求1所述的清洁设备的基站,其特征在于,所述定位机构(3)包括激光雷达,所述基站通过所述激光雷达传递当前位置信号,和/或获取所述清洁设备的当前位置信号。
4.根据权利要求1所述的清洁设备的基站,其特征在于,所述续航系统包括储电模块和电极片(111),所述电极片(111)和所述储电模块连接,且所述电极片(111)为红外充电极片,能够发射红外线,以使所述清洁设备对准所述电极片(111)进行充电。
5.一种上述权利要求1至4任一所述的清洁设备的基站控制方法,其特征在于,包括:
6.根据权利要求5所述的清洁设备的基站控制方法,其特征在于,所述获取基站的第一位置参数和清洁设备的第二位置参数的步骤,具体包括:
7.根据权利要求5所述的清洁设备的基站控制方法,其特征在于,所述根据所述第一位置参数和所述第二位置参数生成位置调整策略的步骤,具体包括:
8.根据权利要求7所述的清洁设备的基站控制方法,其特征在于,所述根据所述识别信息调整所述基站和所述清洁设备的相对位置的步骤,具体包括:
9.根据权利要求7至8任一所述的清洁设备的基站控制方法,其特征在于,所述通过所述基站为所述清洁设备充电的步骤,具体包括:
10.一种清洁设备的基站的控制装置,其特征在于,包括:
11.一种清洁系统,其特征在于,包括如权利要求1至4任一所述的清洁设备的基站,和/或如权利要求10所述的清洁设备的基站的控制装置,并能够实现如权利要求5至9任一所述的清洁设备的基站控制方法的步骤。
技术总结
本发明属于智能家居技术领域,具体涉及一种清洁设备的基站、控制方法、控制装置及清洁系统,清洁设备的基站包括:机体,机体上设置有充电仓,用于容纳清洁设备;移动机构,移动机构设置在机体上,用于驱动基站移动;定位机构,定位机构设置在机体上,用于获取清洁设备的位置;续航系统,续航系统设置在充电仓内;控制方法包括:获取基站的第一位置参数和清洁设备的第二位置参数;根据第一位置参数和第二位置参数生成位置调整策略;根据位置调整策略调节基站和清洁设备的相对位置,以实现通过基站为清洁设备充电;控制装置及清洁系统能够实现上述控制方法。本发明中基站可以主动靠近并跟随清洁设备的作业位置。
技术研发人员:鲜策,刘超,徐华,程建勋
受保护的技术使用者:海尔机器人科技(青岛)有限公司
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!