一种家用的人工与全自动可切换式清洁一体拖地机器人
1.本实用新型涉及拖地机器人技术领域,具体为一种家用的人工与全自动可切换式清洁一体拖地机器人。
背景技术:
2.清洁类清洁一体机在如今与人们的生活密切贴近,家里地面上的清洁工作可以由它来完成,在日后人们日常生活会经常用到它。清洁一体机的设计涉及到运动学、机构学、导航的运用以及路径选择等方面的问题,对于这种为人们服务的清洁一体机的研究是这些年来国内外比较重视的一个问题,也是重点研究的方面之一。如今清洁一体机在清扫过后,依旧会有清扫死角,导致无法有效全面的清洁,因此则需要人工进行清扫,而现有的清扫机器人仅可自动清扫,无法人工进行清扫,因此,我们提出了一种家用的人工与全自动可切换式清洁一体拖地机器人。
技术实现要素:
3.针对现有技术的不足,本实用新型提供了一种家用的人工与全自动可切换式清洁一体拖地机器人,解决了上述背景技术中提出的问题。
4.为实现以上目的,本实用新型通过以下技术方案予以实现:一种家用的人工与全自动可切换式清洁一体拖地机器人,包括机器人本体,所述机器人本体内部的一侧设置有平衡块,所述平衡块的底部安装有万向轮,所述机器人本体的内部设置有清扫电机,所述的一侧安装有轴联器,所述轴联器的一侧设置有涡轮,所述涡轮的两侧均设置有涡杆,所述涡杆与涡轮配合,所述涡杆的底部安装有皮带轮,所述皮带轮的外侧套接有v形皮带,所述皮带轮的底部安装有清扫轴,所述清扫轴的底部固定安装有扫地刷,所述皮带轮的底部且位于清扫轴的外侧安装有深沟球轴承,所述深沟球轴承的顶部设置有密封圈,所述深沟球轴承的内侧设置有挡油环,所述深沟球轴承的内侧且位于挡油环的下方设置有挡圈。
5.优选的,所述机器人本体的内部且位于清扫电机的一侧安装有吸尘电机,所述吸尘电机的两侧均设置有动力轮,所述动力轮与万向轮配合,所述吸尘电机的下方设置有吸尘口,所述吸尘电机的一侧设置有垃圾箱,所述吸尘口与垃圾箱配合,所述机器人本体的内部且位于吸尘电机的一侧设置有干净水箱,所述干净水箱的底部设置有喷水泵,所述垃圾箱的一侧设置有出水板,所述出水板与喷水泵配合,所述机器人本体的底部且位于喷水泵下方的一侧设置有洗涤刷,所述洗涤刷与出水板配合。
6.优选的,所述机器人本体的内部且位于干净水箱的一侧设置有污水箱,所述污水箱的底部设置有抽水泵,所述机器人本体的底部且位于洗涤刷的一侧设置有海绵刷,所述海绵刷与洗涤刷配合。
7.优选的,所述机器人本体的顶部卡接有手推杆,所述机器人本体的顶部固定安装有两个卡盒,所述手推杆的一端固定安装有连接块,所述连接块的两侧均开设有卡孔,所述卡盒的内侧活动安装有卡杆,所述卡杆与卡孔配合,所述卡杆的一端延伸至卡盒的内部安
装有抵块,所述卡盒的内部设置有弹簧,所述弹簧与抵块配合,所述卡杆与卡盒活动连接,所述卡盒的顶部开设有滑槽,所述抵块的顶部固定安装有拉块,所述拉块与卡盒活动连接。
8.优选的,所述清扫轴的顶部穿过涡轮的内部安装有第一端盖,所述机器人本体的内部且位于涡杆的外侧设置有两个底座,所述底座的一侧安装有第二端盖。
9.优选的,所述手推杆可以调节长度,所述手推杆内部设置有用于调节长短的调节螺栓。
10.本实用新型提供了一种家用的人工与全自动可切换式清洁一体拖地机器人,具备以下有益效果:
11.1、该家用的人工与全自动可切换式清洁一体拖地机器人,通过安装手推杆,可以使得机器人本体通过人工进行使用,增加机器人本体的用途,且通过安装扫地刷、吸尘电机、洗涤刷与海绵刷,可以实现扫地、拖地、吸尘三个功能一体,清扫清洁时更为便捷。
12.2、该家用的人工与全自动可切换式清洁一体拖地机器人,通过卡盒、连接块、卡孔、卡杆、弹簧、抵块、滑槽与拉块配合,可以当我们需要手动进行清扫时将手推杆安装在机器人本体的顶部进行使用,不使用时将其取下即可使得机器人本体自动进行清扫,拆装灵活,使用方便。
附图说明
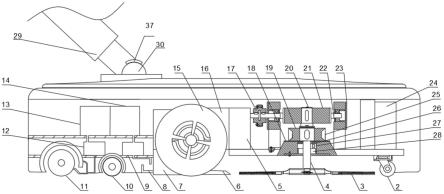
13.图1为本实用新型结构剖视示意图;
14.图2为本实用新型的俯视剖视图;
15.图3为本实用新型的侧视局部剖视图;
16.图4为本实用新型图2中a处结构示意图。
17.图中:1、机器人本体;2、万向轮;3、扫地刷;4、清扫轴;5、清扫电机;6、吸尘口;7、垃圾箱;8、出水板;9、喷水泵;10、洗涤刷;11、海绵刷;12、抽水泵;13、污水箱;14、干净水箱;15、动力轮;16、吸尘电机;17、轴联器;18、密封圈;19、皮带轮;20、第一端盖;21、涡轮;22、涡杆;23、第二端盖;24、平衡块;25、v形皮带;26、挡油环;27、深沟球轴承;28、挡圈;29、手推杆;30、卡盒;31、连接块;32、卡孔;33、卡杆;34、弹簧;35、抵块;36、滑槽;37、拉块。
具体实施方式
18.下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本实用新型一部分实施例,而不是全部的实施例。
19.请参阅图1至图4,本实用新型提供一种技术方案:一种家用的人工与全自动可切换式清洁一体拖地机器人,包括机器人本体1,在机器人本体1机箱正面和侧面装有一个红外开关,用来探测清洁一体机是否会发生碰撞,在底部安装了3个红外开关,可以检测楼梯的位置,防止清洁一体机掉下去,此结构的控制系统所采用的是32位定点dsp2812作为芯片,选用此芯片有两个原因,首先,次芯片最高运行频率能够达到150mhz,比较高的频率能够保控制系统拥有比较强的运算能力。第二,此芯片能够提供整套的片上系统集成有很多个外设,能够非常有效的降低成本,并且让整个智能控制系统变得非常的简单、高效,与此同时,这个芯片还有三个独立的32为cpu定时器加上56个独立编程的引脚。从这里可以看出
这款芯片有着相当好的数据效果,同时还能与控制的片内外设及接口很好的相适应,该机器人本体1的动力轮15上配有光电编码片,可对车轮速度进行检测、控制,并可进行位置及轨道规划,本控制系统中的信息收集模块用到了红外测距传感器和光电编码器。本次论文所采用的红外测距传感器的型号为gp2y0a21,选用这个传感器是因为它的体积小,所占用的空间小,并且精度高,安装也是非常方便,其额定电压为5v,电流为30ma,能探测的最远距离是80cm,机器人本体1内部的一侧设置有平衡块24,平衡块24的底部安装有万向轮2,机器人本体1的内部设置有清扫电机5,清扫电机5选用的型号是55sz01,这个电机的转速能够达到3000转每分钟,功率为12w。选用此电机还有一个原因是它的体积相对来说比较小,安装在清洁一体机的内部不会占用很多地方,比较满足该清洁一体机的结构设计。而且本次所设计的清扫结构的毛刷设置为每秒钟转动三圈,这样垃圾才能够更好的被扫到垃圾箱7内,这就对涡轮21的转速有了要求,其涡轮21转速在2600r/min~3100r/min。因此选用该电机能够满足要求,的一侧安装有轴联器17,轴联器17的一侧设置有涡轮21,涡轮21的两侧均设置有涡杆22,涡杆22与涡轮21配合,涡杆22的底部安装有皮带轮19,皮带轮19的外侧套接有v形皮带25,皮带轮19的底部安装有清扫轴4,清扫轴4的底部固定安装有扫地刷3,皮带轮19的底部且位于清扫轴4的外侧安装有深沟球轴承27,深沟球轴承27的顶部设置有密封圈18,深沟球轴承27的内侧设置有挡油环26,深沟球轴承27的内侧且位于挡油环26的下方设置有挡圈28。
20.机器人本体1的内部且位于清扫电机5的一侧安装有吸尘电机16,吸尘电机16的两侧均设置有动力轮15,动力轮15与万向轮2配合,吸尘电机16的下方设置有吸尘口6,吸尘电机16的一侧设置有垃圾箱7,吸尘口6与垃圾箱7配合,机器人本体1的内部且位于吸尘电机16的一侧设置有干净水箱14,干净水箱14的底部设置有喷水泵9,垃圾箱7的一侧设置有出水板8,出水板8与喷水泵9配合,机器人本体1的底部且位于喷水泵9下方的一侧设置有洗涤刷10,洗涤刷10与出水板8配合。机器人本体1的内部且位于干净水箱14的一侧设置有污水箱13,污水箱13的底部设置有抽水泵12,机器人本体1的底部且位于洗涤刷10的一侧设置有海绵刷11,海绵刷11与洗涤刷10配合,清扫轴4的顶部穿过涡轮21的内部安装有第一端盖20,机器人本体1的内部且位于涡杆22的外侧设置有两个底座,底座的一侧安装有第二端盖23,机器人本体1的内部设置有用于驱动的蓄电池与充电接口,其内部的驱动构件与探测构件控制系统均与蓄电池电性连接。
21.机器人本体1的顶部卡接有手推杆29,机器人本体1的顶部固定安装有两个卡盒30,手推杆29的一端固定安装有连接块31,连接块31的两侧均开设有卡孔32,卡盒30的内侧活动安装有卡杆33,卡杆33与卡孔32配合,卡杆33的一端延伸至卡盒30的内部安装有抵块35,卡盒30的内部设置有弹簧34,弹簧34与抵块35配合,卡杆33与卡盒30活动连接,卡盒30的顶部开设有滑槽36,抵块35的顶部固定安装有拉块37,拉块37与卡盒30活动连接,手推杆29可以调节长度,手推杆29内部设置有用于调节长短的调节螺栓。
22.综上,该家用的人工与全自动可切换式清洁一体拖地机器人,使用时,机器人本体1通过动力轮15与万向轮2带动机器人本体1移动,移动时先通过扫地刷3进行清扫,清扫时通过吸尘电机16与吸尘口6对灰尘进行清理,清扫完成过后喷水泵9将干净水箱14内部水通过出水板8喷洒出,随后根据动力轮15移动洗涤刷10对喷水处进行洗涤,最后通过抽水泵12将洗涤污水抽入污水箱13内,最后通过海绵刷11进行擦干即可完成清洁;在安装手推杆29
时量拉块37向滑槽36一侧拉动,随后将连接块31卡入至两个卡盒30中部,随后松开拉块37,通过弹簧34推动抵块35与卡杆33卡入卡孔32内部,即可对连接块31进行安装,随后即可人工进行使用。
23.以上所述,仅为本实用新型较佳的具体实施方式,但本实用新型的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本实用新型揭露的技术范围内,根据本实用新型的技术方案及其实用新型构思加以等同替换或改变,都应涵盖在本实用新型的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1