牵引机构和清洁机器人的制作方法
本技术属于清洁设备,具体涉及一种牵引机构和清洁机器人。
背景技术:
1、随着社会经济的发展以及家庭生活水平的提高,家居清洁逐步进入智能化、机器化的时代,应运而生的清洁机器人能够将人们从家居清洁工作中解放出来,有效减轻人们在家居清洁方面的工作负担,缓解人们在进行家居清洁过程中的劳累程度。
2、通常而言,清洁机器人通过旋转的清洁组件擦拖待清洁表面,而进行待清洁表面的清洁。因清洁组件的清洁盘和清洁件不超出机身范围设置,致使清洁机器人沿边清洁时清洁效果较差。
技术实现思路
1、因此,本实用新型所要解决的技术问题是清洁机器人沿边清洁时清洁效果较差。
2、为解决上述技术问题,本实用新型提供一种牵引机构,用于清洁机器人,
3、所述清洁机器人包括机壳和清洁模组,所述清洁模组可转动设于机壳,而使所述清洁模组的清洁组件具有沿边位置,所述沿边位置为在前进方向上所述清洁组件的至少部分伸出所述机壳的最大宽度的位置;
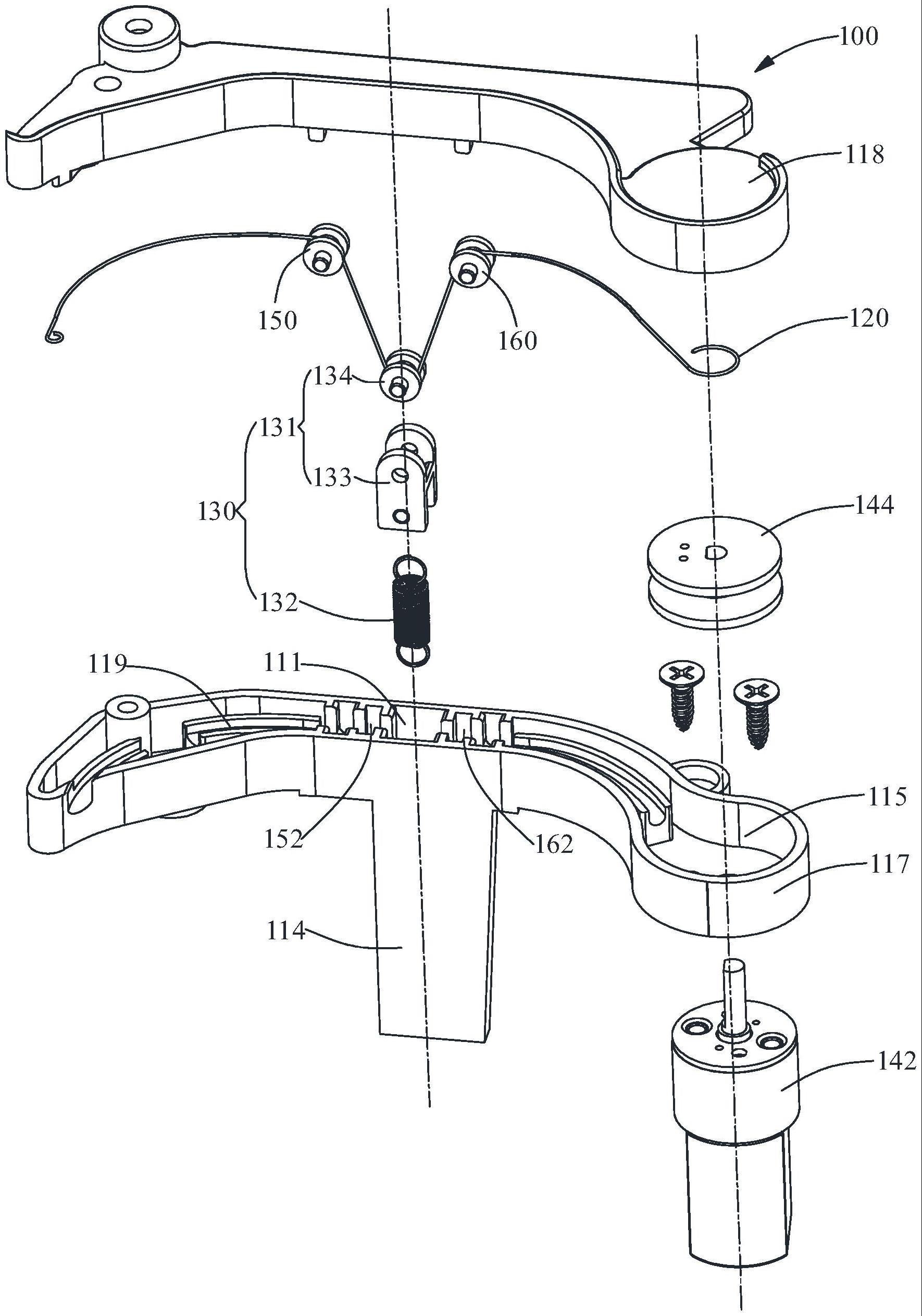
4、所述牵引机构包括:
5、基体;
6、牵引件,所述牵引件设于所述基体,所述牵引件的一端伸出所述基体、且用于连接所述清洁模组;
7、张紧结构,所述张紧结构连接于所述牵引件的两端之间,且用于张紧所述牵引件;以及
8、收放组件,所述收放组件设于所述基体,且固定连接所述牵引件的另一端,所述收放组件用于卷绕收起所述牵引件而牵引所述清洁模组,或者解绕释放所述牵引件而释放所述清洁模组。
9、可选地,所述的牵引机构,所述基体设有导向部;所述张紧结构包括活动结构和张紧件,所述活动结构可活动设于所述导向部而沿所述导向部移动,且滑动连接于所述牵引件的两端之间;所述张紧件连接所述活动结构,且用于施加作用力于所述活动结构上,而使所述活动结构张紧所述牵引件。
10、可选地,所述的牵引机构,所述张紧件为第一弹性件,张紧连接于所述基体和所述活动结构之间;或者所述张紧件为配重块,在重力方向上拉拽所述活动结构。
11、可选地,所述的牵引机构,所述活动结构包括:
12、活动件,所述活动件可活动设于所述导向部,所述活动件的一端与所述张紧件连接;和
13、第一滑轮,所述第一滑轮可旋转设于所述活动件的另一端,且滑动连接于所述牵引件的两端之间。
14、可选地,所述的牵引机构,所述导向部为导槽,所述导槽的相对两侧均设有避让部,一所述避让部避让位于所述活动结构的一侧的部分所述牵引件,另一所述避让部避让位于所述活动结构的另一侧的部分所述牵引件。
15、可选地,所述牵引机构还包括:
16、第二滑轮,所述第二滑轮可旋转设于所述基体,位于所述张紧结构和所述牵引件的一端之间,且滑动连接所述牵引件;和
17、第三滑轮,所述第三滑轮可旋转设于所述基体,位于所述张紧结构和所述牵引件的另一端之间,且滑动连接所述牵引件。
18、可选地,所述的牵引机构,所述收放组件包括:
19、收放电机,所述收放电机设于所述基体;和
20、收放圆体,所述收放圆体固定连接所述收放电机的转轴,且固定连接所述牵引件的另一端,而收放所述牵引件。
21、本实用新型还提供一种清洁机器人,包括:
22、机壳;
23、清洁模组,所述清洁模组包括清洁组件和用以驱动所述清洁组件旋转的驱动模块,所述驱动模块可转动设于所述机壳,而使所述清洁组件具有初始位置和沿边位置,所述沿边位置为前进方向上所述清洁组件的至少部分伸出所述机壳的最大宽度的位置;
24、第二弹性件,所述第二弹性件设于所述机壳和所述驱动模块之间,并通过所述驱动模块使所述清洁组件朝向所述沿边位置运动;以及
25、牵引机构,所述牵引机构为如上所述的牵引机构,所述牵引机构的牵引件的一端连接所述驱动模块,而牵引所述驱动模块转动,并联动所述清洁组件在所述初始位置和所述沿边位置之间运动。
26、可选地,所述的清洁机器人,所述第二弹性件为扭簧,且设于所述机壳和所述驱动模块之间的转动连接处;所述第二弹性件的一扭臂抵接所述机壳,另一扭臂抵接所述驱动模块。
27、可选地,所述的清洁机器人,所述机壳设有第一枢接部、第一安装槽和第一扭臂槽,所述第一安装槽环绕所述第一枢接部设置,所述第一扭臂槽连通所述第一安装槽;所述驱动模块设有第二枢接部、第二安装槽和第二扭臂槽,所述第二安装槽环绕所述第二枢接部设置,所述第二扭臂槽连通所述第二安装槽;所述第一枢接部与所述第二枢接部枢接,所述第二弹性件的一端位于所述第一安装槽中,所述第二弹性件的另一端位于所述第二安装槽中,所述第二弹性件的一扭臂位于所述第一扭臂槽中,所述第二弹性件的另一扭臂位于所述第二扭臂槽中。
28、可选地,所述的清洁机器人,所述第一枢接部和所述第二枢接部之间固接有枢接轴承。
29、可选地,所述清洁机器人还包括:
30、检测器,所述检测器设于所述机壳,用于检测所述驱动模块的位置;和
31、控制器,所述控制器设于所述机壳,且分别与所述检测器、所述牵引机构电性连接,所述控制器用于根据所述检测器检测到的位置控制所述牵引机构。
32、可选地,所述的清洁机器人,所述驱动模块包括:
33、驱动电机;和
34、传动机构,所述传动机构分别连接所述驱动电机和所述清洁组件;
35、其中,所述驱动模块的转动中心位于所述驱动电机的中心轴线上。
36、可选地,所述的清洁机器人,所述基体包括:
37、主体结构,所述主体结构设有第一内腔,所述牵引件位于所述第一内腔,所述牵引件的一端伸出所述主体结构的一端,所述收放组件连接于所述主体结构的另一端;和
38、安装结构,所述安装结构设于所述机壳、且连接于所述主体结构的两端之间,所述安装结构设有第二内腔,所述第二内腔与所述第一内腔连通,所述张紧结构位于所述第二内腔。
39、可选地,所述的清洁机器人,所述主体结构朝向所述驱动模块的一侧呈凹陷设置,而用于收容所述清洁组件位于所述初始位置时的所述驱动模块。
40、本实用新型提供的技术方案,具有以下优点:
41、该牵引机构应用于牵引清洁机器人的清洁模块时,通过收放组件收放牵引件,而带动与牵引件连接的清洁模组转动,进而控制清洁组件的摆出,以覆盖到机身范围,实现沿边清洁,提高了清洁机器人沿边拖地时的清洁效果,解决了清洁组件不能贴边拖地的问题。而且,张紧结构设于牵引件的两端之间,而始终张紧牵引件,当收放组件解绕释放牵引件时,由于外露的部分牵引件处于张紧状态,避免了牵引件松弛而卡勾在其他结构上,以保证牵引件的正常工作。
技术特征:
1.一种牵引机构,用于清洁机器人的清洁模组,其特征在于,所述牵引机构包括:
2.根据权利要求1所述的牵引机构,其特征在于,
3.根据权利要求1所述的牵引机构,其特征在于,所述活动结构包括:
4.根据权利要求1所述的牵引机构,其特征在于,所述导向部为导槽,所述导槽的相对两侧均设有避让部,一所述避让部避让位于所述活动结构的一侧的部分所述牵引件,另一所述避让部避让位于所述活动结构的另一侧的部分所述牵引件。
5.根据权利要求1至4任意一项所述的牵引机构,其特征在于,还包括:
6.根据权利要求1至4任意一项所述的牵引机构,其特征在于,所述收放组件包括:
7.一种清洁机器人,其特征在于,包括:
8.根据权利要求7所述的清洁机器人,其特征在于,
9.根据权利要求8所述的清洁机器人,其特征在于,
10.根据权利要求9所述的清洁机器人,其特征在于,所述第一枢接部和所述第二枢接部之间固接有枢接轴承。
11.根据权利要求7至10任意一项所述的清洁机器人,其特征在于,还包括:
12.根据权利要求7至10任意一项所述的清洁机器人,其特征在于,所述驱动模块包括:
13.根据权利要求7至10任意一项所述的清洁机器人,其特征在于,所述基体包括:
14.根据权利要求13所述的清洁机器人,其特征在于,所述主体结构朝向所述驱动模块的一侧呈凹陷设置,而用于收容所述清洁组件位于所述初始位置时的所述驱动模块。
技术总结
本技术公开一种牵引机构和清洁机器人,该牵引机构用于牵引清洁机器人的清洁模组,且包括基体、牵引件、张紧结构以及收放组件。牵引件设于基体,牵引件的一端伸出基体、且用于连接清洁模组。张紧结构连接于牵引件的两端之间,且用于张紧牵引件。收放组件设于基体,且固定连接牵引件的另一端,收放组件用于卷绕收起牵引件而牵引清洁模组,或者解绕释放牵引件而释放清洁模组。该牵引机构通过收放组件收放牵引件,而带动与牵引件连接的清洁模组转动,进而控制清洁组件的摆出,以覆盖到机身范围,实现沿边清洁,提高了清洁机器人沿边清洁时的清洁效果。
技术研发人员:邓晶,刘广宇,舒忠义,严松,许波建
受保护的技术使用者:追觅创新科技(苏州)有限公司
技术研发日:20221202
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!