一种清洁系统的制作方法
本技术涉及清洁设备,尤其涉及一种清洁系统。
背景技术:
1、为了提高清洁机器人的清洁效果,现有一些清洁机器人的内部设有用于向拖布供水的水箱,使拖布可以吸水润湿后对地面进行湿擦。清洁机器人配置有基站,基站设有带注水嘴的注水组件,清洁机器人的侧壁设置供注水嘴插入水箱中的注水口,清洁机器人进入基站时,注水嘴的端部插入注水口中,基站内的净水箱可以通过注水嘴向水箱注水。现有基站内的注水嘴普遍采用固定式悬臂结构,清洁机器人进入基站时利用锥形的引导斜面使注水嘴对准注水口后插入,但是,此种结构的注水嘴容易因撞击到清洁机器人而发生变形或断裂。现有技术中也有通过电控方式驱动注水嘴插入或脱离注水口的,但采用此种方式的成本较高。
技术实现思路
1、为了解决上述现有技术中存在的缺点和不足,本实用新型提供了一种清洁系统,注水嘴采用活动安装结构,注水嘴在驱动模块的驱动作用下可以向前移动至注水位置,避免注水嘴因撞击到进入基站的清洁机器人而发生变形或断裂的风险,提高注水嘴的结构稳定性。
2、为了实现上述技术目的,本实用新型提供的一种清洁系统,包括清洁机器人和基站,清洁机器人包括机体和设于机体内的水箱,机体的侧壁设有与水箱连通的注水口,基站包括设有供水件和注水组件的基站主体,所述注水组件包括注水嘴和驱动模块,注水嘴连接于供水件且设有插入注水口中的注水位置和收容于基站主体中的回缩位置,驱动模块被配置为在清洁机器人进入基站时被触动并驱动注水嘴自回缩位置向前移动至注水位置。
3、优选的,所述清洁机器人的侧壁设有接电端子,基站主体设有可活动设置的充电端子,驱动模块设于充电端子和注水嘴之间,进入基站的清洁机器人使接电端子与充电端子对接配合以使充电端子活动并触动驱动模块。
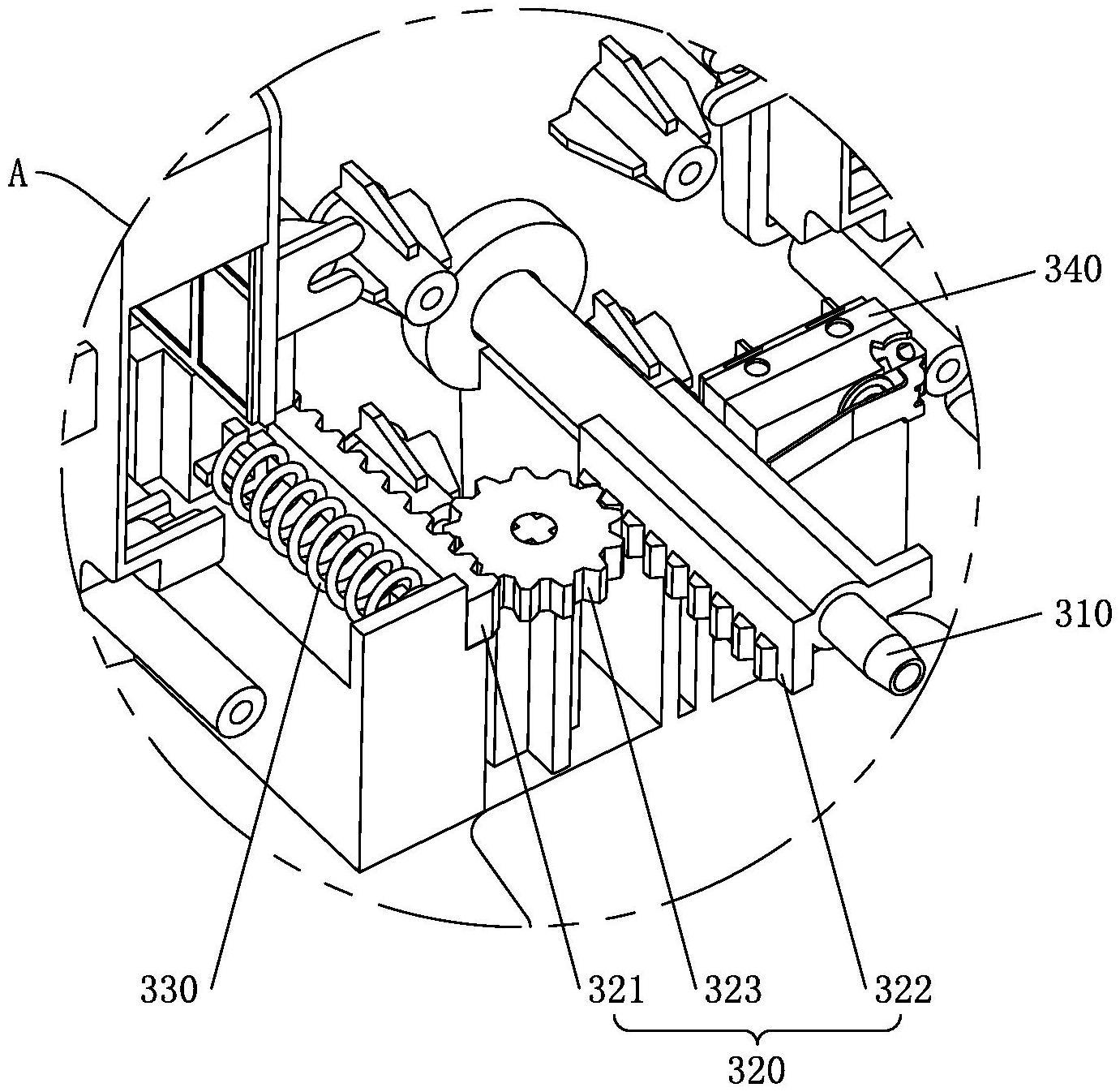
4、优选的,所述驱动模块包括接触于充电端子的第一齿条、连接于注水嘴的第二齿条、同时啮合于第一齿条和第二齿条的传动轮,与接电端子对接配合的充电端子通过第一齿条、传动轮和第二齿条驱动注水嘴自回缩位置向前移动至注水位置。
5、优选的,所述第一齿条和第二齿条平行间隔分布,传动轮设于第一齿条和第二齿条之间,充电端子的活动方向与注水嘴的移动方向相反。
6、优选的,所述驱动模块包括可翘转设置的连杆,连杆的一端与充电端子活动连接、另一端与注水嘴活动连接,与接电端子对接配合的充电端子通过连杆的杠杆作用驱动注水嘴自回缩位置向前移动至注水位置。
7、优选的,所述驱动模块包括与充电端子联动的第一轴柱,注水嘴设有第二轴柱,连杆的一端设有与第一轴柱配合的第一长槽、另一端设有与第二轴柱配合的第二长槽,第一轴柱插设于第一长槽中,第二轴柱插设于第二长槽中。
8、优选的,所述驱动模块包括设于机体侧壁上的第一磁性件和设于注水嘴前端的第二磁性件,进入基站的清洁机器人触动驱动模块使驱动模块通过第一磁性件和第二磁性件之间的磁吸力驱动注水嘴自回缩位置向前移动至注水位置。
9、优选的,所述充电端子可前后摆动设置,基站主体内设有与充电端子联动的联动块,活动的充电端子通过联动块触动驱动模块。
10、优选的,所述注水组件包括弹性件,弹性件被配置为在注水嘴自回缩位置移动至注水位置时受力变形,并在清洁机器人离开基站时带动注水嘴自注水位置向后移动至回缩位置。
11、优选的,所述注水组件包括定位设置的微动开关,注水嘴设有用于触发微动开关的凸出部,向前移动至注水位置的注水嘴使凸出部触发微动开关,以使供水件通过注水嘴向水箱注水。
12、采用上述技术方案后,本实用新型具有如下优点:
13、1、本实用新型提供的清洁系统,注水嘴具有注水位置和回缩位置,清洁机器人进入基站时,驱动模块被触动并驱动注水嘴自回缩位置向前移动至注水位置,使注水嘴可以插入注水口中,以便供水件通过注水嘴向机体内的水箱注水。注水嘴采用活动安装结构,注水嘴在驱动模块的驱动作用下可以向前移动至注水位置,避免注水嘴因撞击到进入基站的清洁机器人而发生变形或断裂的风险,提高注水嘴的结构稳定性,从而提高供水件通过注水嘴向水箱注水的有效性和稳定性,避免注水嘴漏水或注水嘴无法插入注水口的情况。驱动模块采用机械结构,有利于合理控制注水组件的成本,从而有利于合理控制基站的生产成本。
14、2、驱动模块设于充电端子和注水嘴之间,清洁机器人进入基站时,接电端子和充电端子对接配合以便对清洁机器人的电池进行充电。充电端子在与接电端子对接配合时受力进行活动,活动的充电端子触动驱动模块,使驱动模块可以驱动注水嘴自回缩位置向前移动至注水位置。利用充电端子在对接配合时的活动触发驱动模块,可以在保证充电稳定性的同时实现注水对接配合,有利于合理简化驱动模块的具体结构。
15、3、充电端子活动时带动第一齿条向后移动,向后移动的第一齿条通过传动轮驱动第二齿条向前移动,向前移动的第二齿条带动注水嘴自回缩位置向前移动至注水位置。合理设置驱动模块的具体结构,使其满足在充电端子活动时带动注水嘴向前移动至注水位置的结构要求。
16、4、第一齿条和第二齿条优选的平行间隔分布,传动轮设于两个齿条之间,充电端子的活动方向与注水嘴的移动方向相反,合理设置驱动模块各构件的分布方式,有助于合理增大驱动模块在充电端子活动时带动注水嘴向前移动的行程,使注水嘴可以有效的插入注水口中。
17、5、连杆的一端与充电端子活动连接,连杆的另一端与注水嘴活动连接,充电端子与接电端子配合发生活动时通过连杆的杠杆作用带动注水嘴反向移动,使注水嘴可以自回缩位置向前移动至注水位置。合理设置驱动模块的具体结构,使其满足在充电端子活动时带动注水嘴向前移动至注水位置的结构要求。
18、6、连杆的一端通过第一长槽与第一轴柱的配合实现与充电端子联动,连杆的另一端通过第二长槽与第二轴柱的配合实现与注水嘴的活动连接,合理设置连杆的两端分别与充电端子、注水嘴的配合结构,使注水嘴在连杆的杠杆作用下只发生前后移动。
19、7、驱动模块也可以采用磁吸式配合结构,清洁机器人进入基站时,机体侧壁上的第一磁性件和注水嘴前端的第二磁性件之间的磁吸力逐渐增大,在该磁吸力作用下,第二磁性件带动注水嘴自回缩位置向前移动至注水位置。合理设置驱动模块的具体结构,使其满足在清洁机器人进入基站时驱动注水嘴自回缩位置向前移动至注水位置的结构要求。
20、8、充电端子可前后摆动设置,联动块可前后移动设置且与充电端子抵触,活动的充电端子通过联动块触动驱动模块,合理设置充电端子和驱动模块之间的配合结构,有助于降低充电端子与驱动模块之前的配合难度。
21、9、注水嘴自回缩位置向前移动至注水位置时,弹性件受力变形。清洁机器人离开基站时,恢复形变的弹性件带动注水嘴自注水位置向后移动复位至回缩位置。通过弹性件实现注水嘴的自动复位,使注水嘴在常态下收容于基站主体中,避免注水嘴因受到意外撞击而发生变形或断裂的风险,有利于提高注水嘴的结构稳定性。
22、10、注水嘴的凸出部触发微动开关时,表明注水嘴向前移动至注水位置,注水嘴的前端有效的插入注水口中,供水件可以通过注水嘴向水箱有效注水,有利于提高注水的稳定性和有效性。
- 还没有人留言评论。精彩留言会获得点赞!