一种全向除尘机器人的制作方法
本发明涉及智能家居、自动化机器人领域,具体涉及一种全向除尘机器人。
背景技术:
1、由于现代科技发展迅速,人工智能已经应用在了很多领域中,如医疗、教育、机械制造、餐饮等行业,机器人也逐渐走入了普通家庭,服务着人类。在对当前市面上售卖的清洁机器人进行了调研后,发现目前市面上绝大部分清洁机器人都是扫地机器人,清洁对象仅限于地面,对于家庭里窗口位置或者距离地面一定高度的桌面无法进行清洁。
2、本专利结合智能家居、机器人技术。
技术实现思路
1、本发明的目的是发明出一种可以距离地面一定高度进行清洁作业的全向除尘机器人。
2、为解决上述问题,本发明提供了一种可以自动升降、可旋转身体的全向除尘机器人。
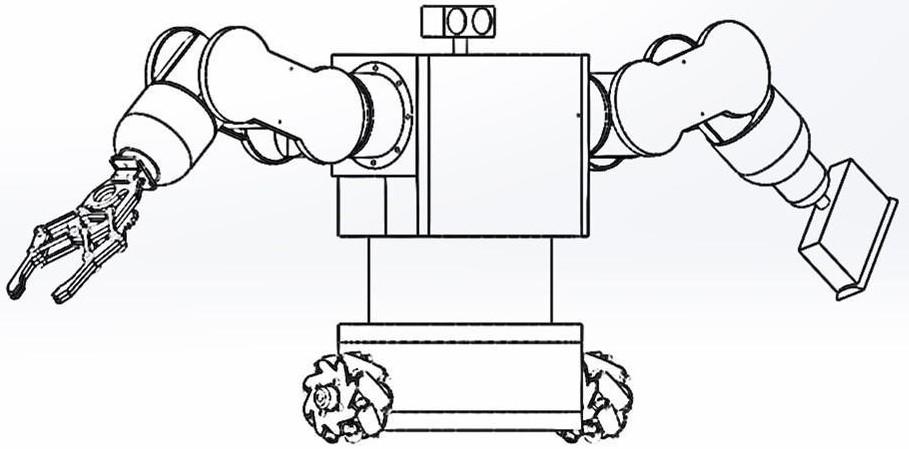
3、所述全向除尘机器人包括机器人身体、机器人头部、五轴关节型机械臂、麦克纳姆轮、吸尘器、机器人底盘、激光雷达、液压式升降柱、直流齿轮减速电机。
4、所述全向除尘机器人身体采用一体式铝合金外壳。
5、所述全向除尘机器人的机器人头部包括10.9寸ips高清显示屏、树莓派4b开发板。
6、所述全向除尘机器人的改良机械臂包括五轴关节型机械臂、吸尘器软管、插拔式吸尘器吸头。
7、所述全向除尘机器人可由6节可充电的18650锂电池独立供电。
8、所述全向除尘机器人的吸尘器包括电动马达、5柄风扇叶、风道、可拆卸式尘盒。
9、所述全向除尘机器人的可拆卸式尘盒包括滤网、滤布。
10、所述全向除尘机器人的小型舵机选用达盛ds3218数字舵机。
11、所述全向除尘机器人的轮子选用2个100mm麦克纳姆轮,在与舵机的配合下控制机器人移动转向。
12、所述全向除尘机器人的升降柱利用液压升降原理,实现多节升降调节高度。
13、所述全向除尘机器人的直流齿轮减速电机型号为my36gp-555,转速为16rpm(转/分),满足机器人身体旋转需要。
14、所述全向除尘机器人的底盘装有激光雷达,在机器人行进过程中可实现自动避障功能。
技术特征:
1.一种全向除尘机器人,其特征在于包括机器人身体、机器人头部、改良五轴关节型机械臂、麦克纳姆轮、吸尘器、小型舵机、液压式升降柱、直流齿轮减速电机。
2.根据权利要求1所述全向除尘机器人,其特征在于机器人身体采用一体式铝合金外壳。
3.根据权利要求1所述全向除尘机器人,其特征在于机器人头部包括10.9寸ips高清显示屏、树莓派4b开发板。
4.据权利要求1所述全向除尘机器人,其特征在于改良机械臂包括五轴关节型机械臂、吸尘器软管、插拔式吸尘器吸头。
5.根据权利要求1所述全向除尘机器人,其特征在于采用麦克纳姆轮确保机器人能够进行全向移动,保证其全向移动的精度和稳定性。
6.根据权利要求1所述全向除尘机器人,其特征在于吸尘器由6节可充电的18650锂电池独立供电。
7.根据权利要求6所述的吸尘器,其特征在于包括电动马达、5柄风扇叶、风道、可拆卸式尘盒。
8.根据权利要求7所述可拆卸式尘盒,其特征在于包括滤网、滤布。
9.根据权利要求1所述全向除尘机器人,其特征在于小型舵机选用达盛ds3218数字舵机。
10.根据权利要求1所述全向除尘机器人,其特征在于选用100mm麦克纳姆轮。
11.根据权利要求1所述全向除尘机器人,其特征在于升降柱利用液压升降原理,实现多节升降调节高度。
12.根据权利要求1所述全向除尘机器人,其特征在于直流齿轮减速电机型号为my36gp-555,转速为16转/分钟,满足机器人身体旋转需要。
技术总结
本专利发明了一种全向除尘机器人,目前市面上绝大部分清洁机器人都是扫地机器人,清洁对象仅限于地面,对于家庭里窗口位置或者距离地面一定高度的桌面无法进行清洁。为了解决这个问题,本专利发明出一种可以距离地面一定高度进行清洁作业的全向除尘机器人。本专利所发明的全向除尘机器人利用舵机与麦克纳姆万向轮进行转向控制,利用液压式升降柱调节垂直地面高度,利用直流齿轮减速电机实现机器人上半部分身体转动,机器人两臂采用改良后的机械臂装置(附有吸尘软管),大大方便了机器人的清洁工作,此外配备可拆卸式脏污收纳箱,可使机器人连续进行清洁作业。
技术研发人员:连志刚,秦荣欣,骆兴傲,袁子逸,贾男
受保护的技术使用者:骆兴傲
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!