一种楼道扶手机器人及控制方法
本发明涉及楼道清洁机器,具体为一种楼道扶手机器人及控制方法。
背景技术:
1、随着城市化进程的加快,高层建筑越来越多,楼道清洁工作量也越来越大,传统的人工清洁方式效率低、成本高、质量差。
2、随着科技的发展,移动机器人技术和吸尘器技术不断进步,为楼道清洁机器人的设计提供了技术支持。随着社会的进步,人们对于生活品质和环境卫生的要求越来越高,楼道清洁机器人能够提供更好的清洁效果和服务体验。
3、目前,市场上已经有一些适合多楼层的扫地机器人,例如追觅w10 pro、石头g10、追觅s10、科沃斯t10 turbo等。这些扫地机器人都具有激光导航、智能规划、自动充电、自动清洗拖布等功能,能够满足不同户型和需求的用户。
4、但是,这些扫地机器人都只能在平面上进行清扫,不能在楼梯上清扫,更不能将楼道与扶手一体化清扫,目前,国内外还没有形成成熟的产品。为此提供一种楼道扶手机器人及控制方法,能够在不同形状和材质的楼梯上进行稳定和安全的移动和清扫以及将楼道与扶手一体化的清洁。
技术实现思路
1、本发明的目的在于提供一种楼道扶手机器人及控制方法,以解决上述背景技术中提出的现有的扫地机器人都只能在平面上进行清扫,不能在楼梯上清扫,更不能将楼道与扶手一体化清扫的问题。
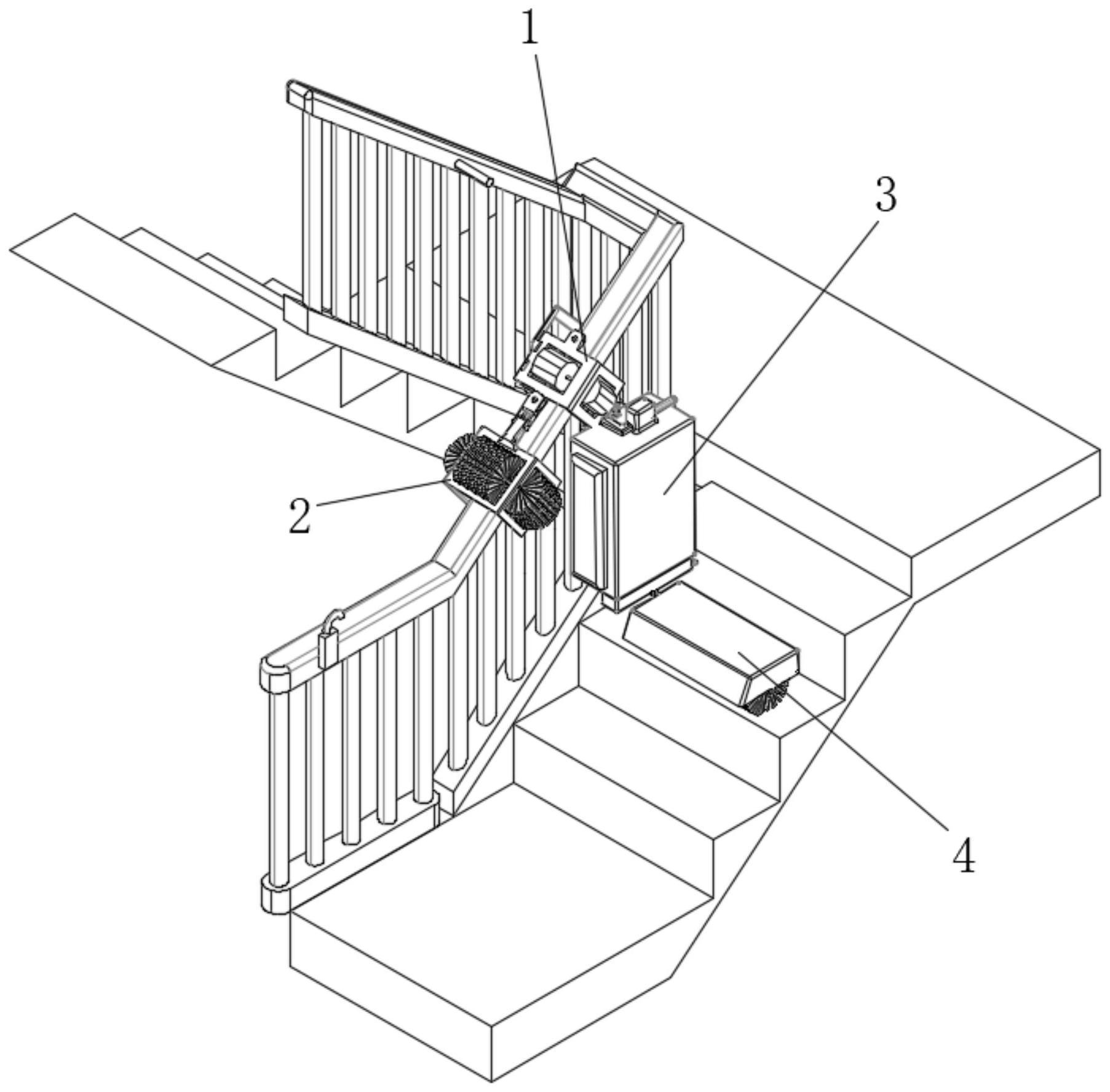
2、为实现上述目的,本发明提供如下技术方案:一种楼道扶手机器人,包括扶手咬合机构,所述扶手咬合机构一侧中央转动连接有万向连轴杆,所述万向连轴杆一端转动设有扶手清洁机构,所述扶手咬合机构一侧底部转动设有栏杆清洁机构,所述栏杆清洁机构外壁一侧设有升降机构,所述升降机构一侧滑动设有伸缩杆,所述伸缩杆活塞杆一端设有台阶清洁机构;所述扶手咬合机构包括:l型框架,所述l型框架顶部中央转动设有驱动轮,所述l型框架侧面中央转动设有被动夹紧轮,所述l型框架远离被动夹紧轮一侧转动设有主动夹紧轮,所述扶手咬合机构还包括:越障夹棒,所述越障夹棒与主动夹紧轮安装在同一侧,所述越障夹棒与l型框架之间通过扭簧转轴连接。
3、优选的,所述l型框架位于驱动轮一端固定设有驱动电机,所述驱动电机动力输出轴一端与驱动轮一端固定连接,所述驱动电机用于驱动驱动轮转动,所述主动夹紧轮外侧设有轮架,所述轮架通过轴与l型框架连接,所述l型框架位于轮架一端固定设有伺服电机,所述伺服电机动力输出轴一端与轮架一端固定连接,所述伺服电机用于调节轮架的开合角度,从而调节主动夹紧轮的夹紧力度,所述主动夹紧轮和被动夹紧轮为中部内凹的橡胶轮。
4、优选的,所述扶手清洁机构包括:毛刷框架,所述毛刷框架呈u型,所述毛刷框架顶面和两侧面转动设有扶手清洁毛刷。
5、优选的,所述栏杆清洁机构包括:护栏清洁壳,所述护栏清洁壳两端内壁之间转动连接有护栏清洁毛刷,所述护栏清洁壳一侧设有水箱,所述护栏清洁壳顶部外壁设有微型水泵,所述微型水泵进水口一端设有进水管,出水口一端设有出水管,所述进水管一端延伸至水箱内部底端,所述出水管出水口位于护栏清洁毛刷上方,所述水箱内部内置有液位传感器。
6、优选的,所述台阶清洁机构包括:扬尘挡板,所述扬尘挡板一端外壁与伸缩杆活塞杆一端固定连接,所述扬尘挡板两端内壁之间转动设有楼梯面清洁毛刷,所述扬尘挡板一端外壁设有毛刷驱动电机,所述毛刷驱动电机动力输出轴一端与楼梯面清洁毛刷固定连接,所述扬尘挡板顶部设有第二摄像头,所述l型框架顶部一侧设有第一摄像头。
7、优选的,所述万向连轴杆一端与l型框架转动连接,所述万向连轴杆与l型框架之间能够形水平方向的转动,所述万向连轴杆另一端与毛刷框架转动连接,所述万向连轴杆与毛刷框架之间能够形成上下方向的转动。
8、优选的,所述升降机构为电动直线滑轨,所述升降机构的行程大于楼道台阶高度。
9、优选的,所述护栏清洁壳底部一侧设有回收水槽,所述护栏清洁壳底部位于回收水槽上方开设有过滤网孔,所述护栏清洁壳内壁开设有若干导水槽,所述导水槽呈竖直开设。
10、优选的,所述护栏清洁壳外壁一侧设有二次电池仓和控制盒,所述护栏清洁壳外壁一侧设有陀螺仪传感器,用于感知楼道扶手机器人的运行路径,所述控制盒内设有控制电路板,所述控制电路板与第一摄像头、第二摄像头电性连接,所述控制电路板上集成有wifi模块,用于手机互联。
11、一种楼道扶手机器人的控制方法,包括以下步骤:
12、s1:通过手机app端下达指令,启动楼道扶手机器人,楼道扶手机器人的wifi模块一直连接着路由器,由服务器进行连接枢纽,方便与手机app进行数据交互;
13、s2:在机器人启动时,机器人的电池电量就能够由控制电路板上的芯片感知到,从而显示到手机app上,方便及时更换电池或者为电池充电;
14、s3:控制电路板控制伺服电机转动,使主动夹紧轮限制到固定角度,与被动夹紧轮产生配合,使扶手上整个装置固定,随后控制电路板驱动电机,使护栏清洁毛刷和楼梯面清洁毛刷不停的转动,根据手机端app模式的选择可更改毛刷的旋转速度,从而达到不同的清洁效果,刚启动时默认为低速模式;
15、s4:控制电路板同时启动微型水泵和液位传感器,微型水泵在二次电池的作用下经过水箱将水运输到不同的毛刷处,同时水箱中的清洁剂也能顺带过去,产生清洁效果,而液位传感器放置在水箱中感知水位的变化,当水位低于最低高度时,液位传感器将报警闪烁,控制电路板将水位信息传输到手机app处,起提醒作用;
16、s5:楼道扶手机器人正常启动后,全程开启两个摄像头,第一摄像头位于扶手上方,主要拍摄扶手表面,经过图像处理得到脏污程度,由此来判断需要清洁的模式以及清洁力度的大小和清洁的时长,当达到预计的清洁时长后,控制位于楼梯面清洁毛刷和水箱连接处的升降机构,通过升降机构将整个楼梯面清洁毛刷向高处抬升,使得整个台阶清洁机构抬升到上一台阶或下一台阶;
17、第二摄像头位于楼梯面清洁毛刷上方,可直接拍摄到楼梯阶层和障碍物,通过视觉识别算法可判断位于楼梯面的障碍物,经过深度学习的训练,该机器人能够识别生活中常见的种类物品,智能避障,当识别到前方有需要绕开的障碍物时,可控制伸缩杆将楼梯面清洁毛刷向外推或向内拉,以此来避开障碍,避开障碍物后,回归原位继续清洁;
18、s6:当机器人从上至下清洁时,陀螺仪传感器能感知到当前的运行状态,到达最底层时能够自动使驱动轮的电机反转,从而由低楼层向高楼层清洁,实现反复清洁;
19、s7:在使用一段时间后,可以更换易损坏毛刷,电机以及清洁剂,提高清洁效率。
20、与现有技术相比,本发明的有益效果是:
21、1、本发明通过设置的扶手咬合机构,实现了在楼道扶手一体清洗机器人使用时,在扶手咬合部分,主动夹紧轮在伺服电机的带动下与被动夹紧轮夹在扶手两侧完成固定,顶部橡胶的驱动轮在驱动电机带动下,通过驱动轮与扶手顶部的摩擦力,带动扶手部分的前进,在扶手拐弯处有越障夹棒的辅助,减少了卡顿,通过越障夹棒的辅助完成转向,实现整个楼道扶手机器人的自动移动,通过伺服电机调节轮架的角度,使主动夹紧轮夹合角度和力度可变,适用于多种型号的扶手,无需人工牵引,省时省力,需要拆卸时,仅需让电机断电,便能自下而上的拆卸,护栏清洁毛刷和楼梯面清洁毛刷起到辅助前进和支撑作用,柔软的毛刷能提升前进时的稳定性,减少摇晃;
22、2、本发明通过设置的扶手清洁机构与位于前方的扶手咬合机构通过万向连轴杆连接,使得扶手清洁机构能够相对于扶手咬合机构实现上下和水平方向的转动,不论是产生高低差或者发生转向,在经过转弯时依旧能带动扶手清洁机构的前进,扶手清洁机构在前进过程中,通过扶手清洁毛刷对扶手表面进行清洁;
23、3、本发明通过设置的栏杆清洁机构,在栏杆清洁部分,通过微型水泵把水箱中的清洁剂输送到护栏清洁毛刷上,护栏清洁毛刷在电机的带动下旋转并清洁护栏,多余的水分或者污水会在离心力下甩到护栏清洁壳内壁上并通过导水槽得到高效的收集,保证了单向清洁,减少了对周围环境的污染,污水流向底部并通过过滤网孔汇积于底部的回收水槽中,完成定点排放,提高清洁效率;
24、4、本发明通过设置的台阶清洁机构,台阶清洁部分,在楼梯面清洁毛刷上盖有扬尘挡板,楼梯面清洁毛刷在电机带动工作下产生的扬尘因扬尘挡板得到有效抑制,楼梯面清洁毛刷由伸缩杆连接,能够进行左右的往复运动,以达到更好的楼梯面清洁效果,随着扶手咬合机构的带动,通过升降机构带动伸缩杆以及楼梯面清洁毛刷组件上升或者下降,实现台阶的依次清洁,提高清洁效率;
25、5、本发明可因楼道环境更换结构:在现有清洁技术上专门设计可用于清洁楼道、扶手等不同的表面的结构,这是传统的地面清洁机器人无法实现的,本发明先进的导航和识别技术:楼道扶手机器人配备有传感器和摄像头,可以自动识别和适应复杂的楼道环境,精确地导航和清洁,效率高:可以将楼道和扶手一起清洁,并且持续不断地工作,不需要休息和停工,因此在效率上超过了人工清洁,而人工清洁工人可能需要定期休息,且工作时间通常有限,安全:在楼道清洁中,有可能会遇到危险的情况,例如潮湿的地板或高度的清洁工作,这可能会对人工清洁工人造成安全风险,然而,楼道扶手机器人不受这些因素的影响,可以在任何环境下工作,大大降低了安全风险。
- 还没有人留言评论。精彩留言会获得点赞!