尘袋的检测方法、扫地机器人及计算机可读存储介质与流程
本发明涉及扫地机器人领域,尤其涉及一种尘袋的检测方法、扫地机器人及计算机可读存储介质。
背景技术:
1、智能扫地机器人,又称自动打扫机、智能吸尘、机器人吸尘器等,是智能家用电器的一种,能凭借一定的人工智能,自动在室内和室外内完成地板清理工作。一般采用刷扫和真空方式,将地面杂物先吸纳进入自身的垃圾收纳盒,从而完成地面清理的功能。一般来说,将完成拖地、吸尘、擦地工作的机器人,也统一归为智能扫地机器人,现有的扫地机器人包括拖布,在扫地机器人清扫过程中,拖布能够实现拖地的效果,也即是说,智能扫地机器人不仅具有扫地的功能,还具备有拖地的功能,提升了智能扫地机器人的多功能化,提升了用户的体验。
2、一般的,当扫地机器人接受全局清扫任务的情况下,需要执行全局区域清扫操作,由于在清扫过程中所产生清扫灰尘与垃圾不同,此时需要扫地机执行集尘操作,通常是扫地机完成清扫后直接前往基站进行集尘操作,然而,在尘袋剩余容量不满足集尘要求时,扫地机尘盒中清扫灰尘与垃圾无法完成集尘操作,容易造成细菌滋生和环境污染等情况,因此,无法准确的按照清扫要求来继续操作等情况,降低全局清扫的实用性,不利于用户的使用。
技术实现思路
1、基于此,有必要针对上述技术问题,提供一种尘袋的检测方法、扫地机器人及计算机可读存储介质,以解决现有技术中的扫地机器人的尘袋在不满足集尘要求时候,无法完成集尘操作,导致尘盒可能会产生细菌的问题。
2、本发明实施方式提供一种尘袋的检测方法,用于扫地机器人,所述尘袋的检测方法包括:
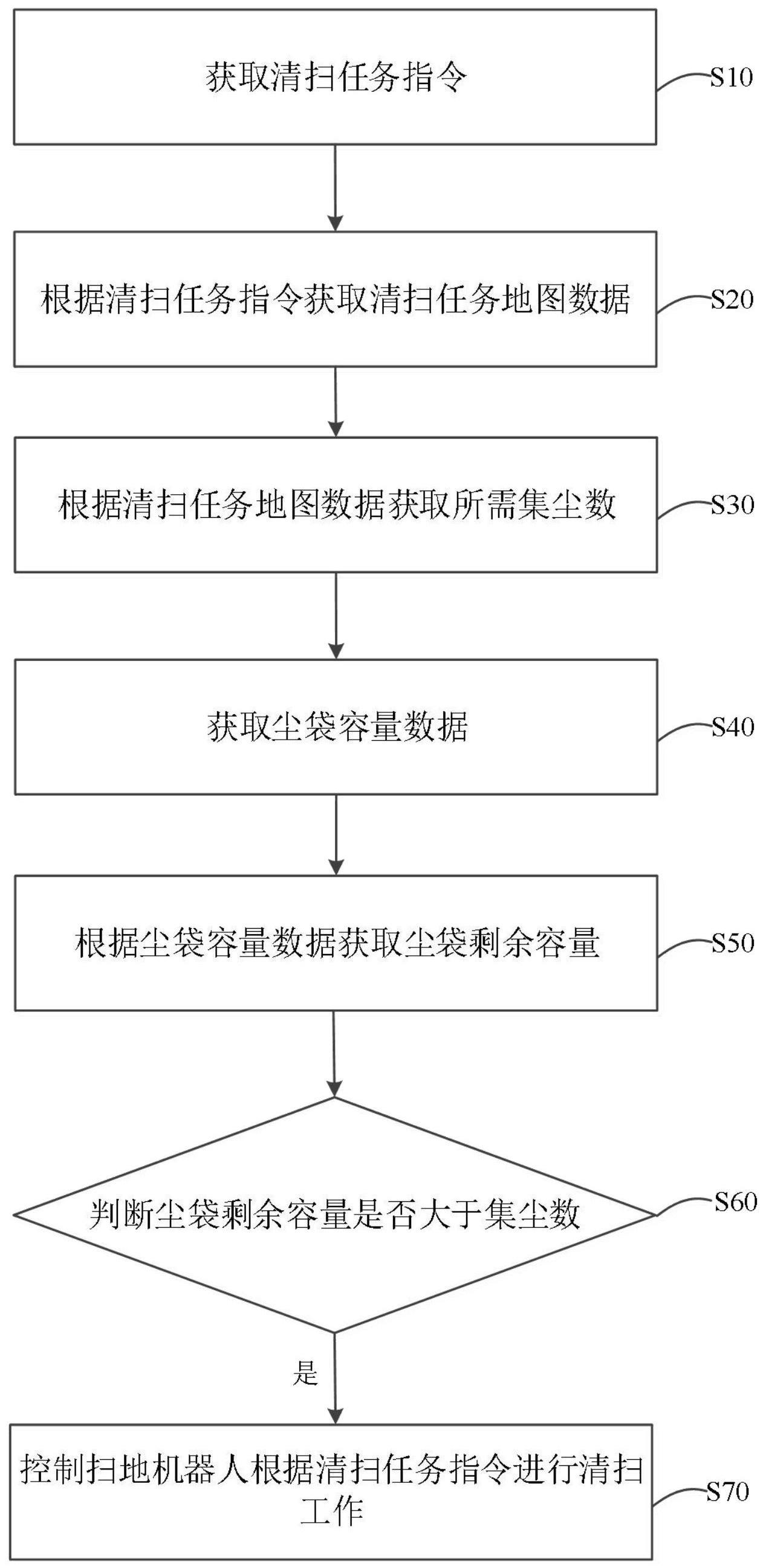
3、获取清扫任务指令;
4、根据清扫任务指令获取清扫任务地图数据;
5、根据所述清扫任务地图数据获取所需集尘数;
6、获取尘袋容量数据;
7、根据所述尘袋容量数据获取尘袋剩余容量;
8、判断所述尘袋剩余容量是否大于所述集尘数;
9、若是,控制所述扫地机器人根据所述清扫任务指令进行清扫工作。
10、本发明的尘袋的检测方法,在获取清扫任务指令之后,会先根据清扫任务指令获取清扫任务地图数据,然后根据清扫任务地图数据来预估所需集尘数,之后获取尘袋的容量数据,根据尘袋容量数据来获取到尘袋剩余容量,之后判断尘袋剩余容量是否大于集尘数,在判断尘袋剩余容量大于集尘数的情况下,则说明集尘数能够全部被收容至尘袋中,此时,才会控制扫地机器人根据清扫任务指令进行清扫工作。也即是说,扫地机器人在工作之前,会先根据清扫任务指令获取到清扫地图数据,然后根据清扫地图数据的面积来预估集尘数,然后在获取基站的尘袋的剩余容量,判断基站的尘袋的剩余容量大于集尘数的情况下,才会控制扫地机器人根据清扫任务指令进行清扫工作,在判断基站的尘袋的剩余容量小于集尘数的情况下,不会控制扫地机器人根据清扫任务指令进行清扫工作,如此,以避免出现出现扫地机器人清扫完毕之后不能进行集尘的情况下,提升了扫地机器人的工作效率,提高了用户的体验度。
11、进一步地,所述判断所述尘袋剩余容量是否大于所述集尘数,包括:
12、若否,控制所述扫地机器人延迟清扫工作;
13、控制基站发出更换尘袋的报警提示。
14、进一步地,所述控制基站发出更换尘袋的报警提示之后,包括:
15、判断所述基站的尘袋是否更换完成;
16、若是,控制所述扫地机器人根据所述清扫任务指令进行清扫工作。
17、进一步地,所述若是,控制所述扫地机器人根据所述清扫任务指令进行清扫工作之后,包括:
18、判断所述扫地机器人是否清扫完毕;
19、若是,获取所述扫地机器人的尘盒的集尘数据;
20、判断所述尘袋剩余容量是否满足所述尘盒的集尘数据;
21、若是,控制所述扫地机器人返回基站并进行集尘操作。
22、进一步地,所述判断所述尘袋剩余容量是否满足所述尘盒的集尘数据,包括:
23、若否,控制所述扫地机器人原地待机;
24、控制所述基站发出更换尘袋的报警提示;
25、判断所述尘袋是否更换完成;
26、若是,控制所述扫地机器人返回基站并进行集尘操作。
27、进一步地,所述若是,控制所述扫地机器人返回基站并进行集尘操作之后,包括:
28、获取当天环境温度;
29、判断所述环境温度是否大于25度;
30、若是,控制基站发出更换尘袋的报警提示。
31、本发明实施方式提供一种扫地机器人,所述扫地机器人包括:
32、第一获取模块,所述第一获取模块用于获取清扫任务指令;
33、第二获取模块,所述第二获取模块用于根据清扫任务指令获取清扫任务地图数据;
34、第三获取模块,所述第三获取模块用于根据所述清扫任务地图数据获取所需集尘数;
35、第四获取模块,所述第四获取模块用于获取尘袋容量数据;
36、第五获取模块,所述第五获取模块用于根据所述尘袋容量数据获取尘袋剩余容量;
37、第一判断模块,所述第一判断模块用于判断所述尘袋剩余容量是否大于所述集尘数;
38、第一控制模块,所述第一控制模块用于在所述第一判断模块判断所述尘袋剩余容量大于所述集尘数的情况下,控制所述扫地机器人根据所述清扫任务指令进行清扫工作。
39、本发明的扫地机器人,在获取清扫任务指令之后,会先根据清扫任务指令获取清扫任务地图数据,然后根据清扫任务地图数据来预估所需集尘数,之后获取尘袋的容量数据,根据尘袋容量数据来获取到尘袋剩余容量,之后判断尘袋剩余容量是否大于集尘数,在判断尘袋剩余容量大于集尘数的情况下,则说明集尘数能够全部被收容至尘袋中,此时,才会控制扫地机器人根据清扫任务指令进行清扫工作。也即是说,扫地机器人在工作之前,会先根据清扫任务指令获取到清扫地图数据,然后根据清扫地图数据的面积来预估集尘数,然后在获取基站的尘袋的剩余容量,判断基站的尘袋的剩余容量大于集尘数的情况下,才会控制扫地机器人根据清扫任务指令进行清扫工作,在判断基站的尘袋的剩余容量小于集尘数的情况下,不会控制扫地机器人根据清扫任务指令进行清扫工作,如此,以避免出现出现扫地机器人清扫完毕之后不能进行集尘的情况下,提升了扫地机器人的工作效率,提高了用户的体验度。
40、进一步地,所述扫地机器人包括:
41、第二判断模块,所述第二判断模块用于判断所述扫地机器人是否清扫完毕;
42、第六获取模块,所述第六获取模块用于在所述第二判断模块判断所述扫地机器人清扫完毕的情况下,获取所述扫地机器人的尘盒的集尘数据;
43、第三判断模块,所述第三判断模块用于判断所述尘袋剩余容量是否满足所述尘盒的集尘数据;
44、第二控制模块,所述第二控制模块用于在所述第三判断模块判断所述尘袋剩余容量满足所述尘盒的集尘数据的情况下,控制所述扫地机器人返回基站并进行集尘操作。
45、进一步地,所述扫地机器人包括:
46、第三控制模块,所述第三控制用于用于在所述第三判断模块判断所述尘袋剩余容量不满足所述尘盒的集尘数据的情况下,控制所述扫地机器人原地待机;
47、第四控制模块,所述第四控制模块用于控制所述基站发出更换尘袋的报警提示;
48、第四判断模块,所述第四判断模块用于判断所述尘袋是否更换完成;
49、第五控制模块,所述第五控制模块用于在所述第四判断模块判断所述尘袋更换完成的情况下,控制所述扫地机器人返回基站并进行集尘操作。
50、一种计算机可读存储介质,所述计算机可读存储介质存储有计算机程序,所述计算机程序被处理器执行时实现上述尘袋的检测方法。
51、本发明的计算机可读存储介质,在获取清扫任务指令之后,会先根据清扫任务指令获取清扫任务地图数据,然后根据清扫任务地图数据来预估所需集尘数,之后获取尘袋的容量数据,根据尘袋容量数据来获取到尘袋剩余容量,之后判断尘袋剩余容量是否大于集尘数,在判断尘袋剩余容量大于集尘数的情况下,则说明集尘数能够全部被收容至尘袋中,此时,才会控制扫地机器人根据清扫任务指令进行清扫工作。也即是说,扫地机器人在工作之前,会先根据清扫任务指令获取到清扫地图数据,然后根据清扫地图数据的面积来预估集尘数,然后在获取基站的尘袋的剩余容量,判断基站的尘袋的剩余容量大于集尘数的情况下,才会控制扫地机器人根据清扫任务指令进行清扫工作,在判断基站的尘袋的剩余容量小于集尘数的情况下,不会控制扫地机器人根据清扫任务指令进行清扫工作,如此,以避免出现出现扫地机器人清扫完毕之后不能进行集尘的情况下,提升了扫地机器人的工作效率,提高了用户的体验度。
- 还没有人留言评论。精彩留言会获得点赞!