带有吸风吸液组件的清洁机器人及其吸风吸液方法与流程
本发明涉及清洁机器人,尤其涉及一种带有吸风吸液组件的清洁机器人及其吸风吸液方法。
背景技术:
1、现有技术的清洁机器人通过清洁刷工作,在对地面进行清洁工作时,由于应用场景的不同,需要适应各种类型的地面,当地面存在浅深不一的凹槽和坑洼时,此时,现有技术的清洁机器人的清洁刷被地面限制,难以深入凹槽和坑洼区域,往往会漏过地面存在的凹槽和坑洼,导致地面的脏污残留,清洁不彻底,需要人工进一步清理。
技术实现思路
1、本发明的一个目的在于提供一种带有吸风吸液组件的清洁机器人及其吸风吸液方法,通过吸风吸液组件,实现对凹坑、沟槽路面的深层清理,清洁程度较彻底。
2、本发明的其它优势和特点通过下述的详细说明得以充分体现并可通过所附权利要求中特地指出的手段和装置的组合得以实现。
3、依本发明的一个方面,能够实现前述目的和其他目的和优势的本发明的一种带有吸风吸液组件的清洁机器人,包括:
4、车体,所述车体包括处理器;
5、刷体,所述刷体被可移动地设于所述车体的底部;
6、行走件,所述行走件被可转动地设于所述车体的底部;
7、喷液组件,所述喷液组件被设于所述车体底部的前方;
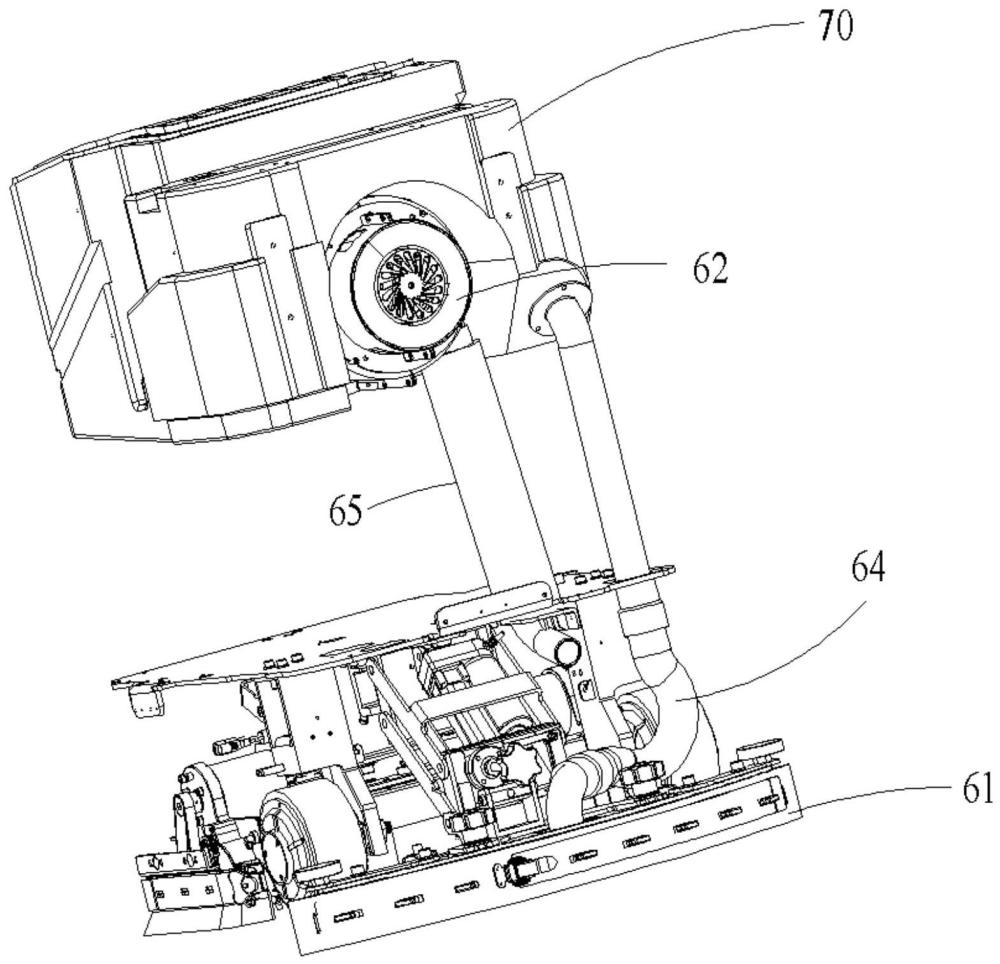
8、吸风吸液组件,所述吸风吸液组件包括吸液扒和吸风管,所述吸液扒被可移动地设于所述车体底部的后方,所述刷体位于所述喷液组件和所述吸液扒之间;
9、深度成像装置,所述深度成像装置被设于所述车体的上方,所述深度成像装置被连接至所述处理器;
10、污液箱,所述污液箱被设于所述车体,所述吸风管自所述吸液扒被连通至所述污液箱;
11、清液箱,所述喷液组件被连通至所述清液箱。
12、根据本发明的一个实施例,所述吸风吸液组件还包括吸液电机,所述吸液电机被设于所述吸风管,所述吸液电机在正常清洁和深度清洁的两个工作模式之间被切换。
13、根据本发明的一个实施例,所述吸风吸液组件还包括水气隔离件,所述水气隔离件被设于所述污液箱的内部,所述吸液电机被连接至所述水气隔离件。
14、根据本发明的一个实施例,所述喷液组件包括喷液管,所述喷液管被连通至所述清液箱,所述喷液管被设于所述刷题的前方。
15、根据本发明的一个实施例,所述喷液管具有多个出液孔,每个所述出液孔被均匀地设于所述喷液管。
16、根据本发明的一个实施例,所述喷液组件包括被设于所述车体的过滤器、液泵、电磁阀、软管,所述喷液管通过所述软管被连通至所述电磁阀,所述电磁阀通过所述软管被连通至所述液泵,所述液泵通过所述软管被连通至所述过滤器,所述喷液管、所述过滤器、所述液泵、所述电磁阀和所述软管组成出液的液路路径。
17、根据本发明的一个实施例,所述吸风吸液组件还包括排气管,所述吸液电机被设于所述吸风管和所述排气管,所述排气管和所述吸风管被连通。
18、根据本发明的一个实施例,所述吸液扒具有胶皮和被所述胶皮形成的腔体。
19、依本发明的又一个方面,能够实现前述目的和其他目的和优势的本发明的一种带有吸风吸液组件的清洁机器人的吸风吸液方法,包括以下步骤:
20、(a)启动正常清洁的工作模式;
21、(b)判断前方路面环境是否存在沟槽,如是接步骤(c),如否接步骤(d);
22、(c)减少或停止出液,增加吸液功率;
23、(d)保持正常清洁的工作模式。
24、根据本发明的一个实施例,所述步骤(c)包括子步骤:切换正常清洁的工作模式至深度清洁的工作模式,直至通过沟槽环境后,自深度清洁的工作模式切回正常清洁的工作模式。
25、本发明的有益效果是:通过正常清洁和深度清洁的两种工作模式的切换,实现对存在沟槽凹陷等问题路面的深层清理,无需人工二次清理,自动化清洁程度较高。
技术特征:
1.一种带有吸风吸液组件的清洁机器人,其特征在于,包括:
2.根据权利要求1所述的清洁机器人,其特征在于,所述吸风吸液组件还包括吸液电机,所述吸液电机的入口端被设于所述污液箱,所述吸液电机在正常清洁和深度清洁的两个工作模式之间被切换。
3.根据权利要求2所述的清洁机器人,其特征在于,所述吸风吸液组件还包括水气隔离件,所述水气隔离件被设于所述污液箱的内部,所述吸液电机被连接至所述水气隔离件。
4.根据权利要求3所述的清洁机器人,其特征在于,所述喷液组件包括喷液管,所述喷液管被连通至所述清液箱,所述喷液管被设于所述刷体的前方。
5.根据权利要求4所述的清洁机器人,其特征在于,所述喷液管具有多个出液孔,每个所述出液孔被均匀地设于所述喷液管。
6.根据权利要求5所述的清洁机器人,其特征在于,所述喷液组件包括被设于所述车体的过滤器、液泵、电磁阀、软管,所述喷液管通过所述软管被连通至所述电磁阀,所述电磁阀通过所述软管被连通至所述液泵,所述液泵通过所述软管被连通至所述过滤器,所述喷液管、所述过滤器、所述液泵、所述电磁阀和所述软管组成出液的液路路径。
7.根据权利要求6所述的清洁机器人,其特征在于,所述吸风吸液组件还包括排气管,所述吸液电机被设于所述吸风管和所述排气管,所述排气管和所述吸风管被连通。
8.根据权利要求7所述的清洁机器人,其特征在于,所述吸液扒具有胶皮和被所述胶皮形成的腔体。
9.一种带有吸风吸液组件的清洁机器人的吸风吸液方法,其特征在于,包括以下步骤:
10.根据权利要求9所述的吸风吸液方法,其特征在于,所述步骤(c)包括子步骤:切换正常清洁的工作模式至深度清洁的工作模式,直至通过沟槽环境后,自深度清洁的工作模式切回正常清洁的工作模式。
技术总结
本发明公开了一种带有吸风吸液组件的清洁机器人,包括:车体、刷体、喷液组件、吸风吸液组件、深度成像装置、污液箱和清液箱,所述车体包括处理器,所述刷体被可移动地设于所述车体的底部,行走件,所述行走件被可转动地设于所述车体的底部,所述喷液组件被设于所述车体底部的前方,所述吸风吸液组件包括吸液扒和吸风管,所述吸液扒被可移动地设于所述车体底部的后方,所述刷体位于所述喷液组件和所述吸液扒之间,所述深度成像装置被设于所述车体的上方,所述深度成像装置被连接至所述处理器,所述污液箱被设于所述车体,所述吸风管自所述吸液扒被连通至所述污液箱,所述喷液组件被连通至所述清液箱。
技术研发人员:鲁超,李岩,吴潇,石福君,苗应亮,胡刚
受保护的技术使用者:盛视科技股份有限公司
技术研发日:
技术公布日:2024/3/4
- 还没有人留言评论。精彩留言会获得点赞!