一种基于双臂协作的全自动咖啡冲泡装置及控制方法与流程
本发明涉及咖啡机,尤其涉及一种基于双臂协作的全自动咖啡冲泡装置及控制方法。
背景技术:
1、咖啡机是集磨粉、压粉、装粉、冲泡、清除残渣等咖啡酿制过程于一身的自动化机器。通过咖啡机冲泡咖啡能够有效的减少人力及降低时间消耗,对于快节奏生活中喝咖啡需要节省时间的人群是优先选择。因此,咖啡机常常广泛应用在办公室、访客接待等场景中。
2、但原味咖啡苦涩不太符合大多数国人的口味,故此,还需要添加糖、奶等调味料,现有的咖啡机只能够实现咖啡豆研磨后冲泡功能;加牛奶、加糖,市面上的设备均无法真正做到全自动操作。
技术实现思路
1、本发明的第一个目的在于提供一种基于双臂协作的全自动咖啡冲泡装置,其旨在解决现有的咖啡机无法实现全自动冲泡咖啡的技术问题。
2、为达到上述目的,本发明提供的方案是:
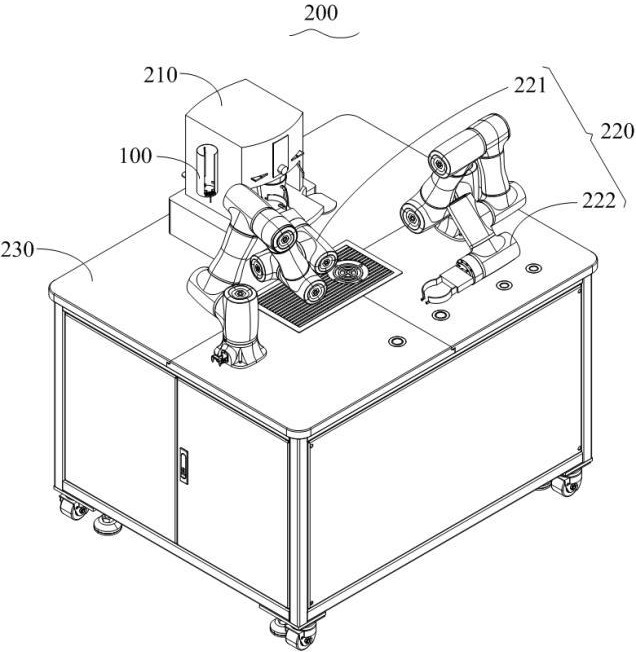
3、一种基于双臂协作的全自动咖啡冲泡装置,其特征在于,包括:
4、咖啡机主体,用于制作咖啡原液;
5、落杯器,用于放置杯体组;
6、置物台,用于放置糖包、搅拌器,奶罐;
7、机械手组件,所述机械手组件包括第一机械手和第二机械手,所述第一机械手用于拿取研磨好的咖啡原液和杯体,第二机械手用于拿取置物台上的糖包、搅拌器、奶罐。
8、可选地,所述第一机械手包括第一气缸和第一夹持件,所述第一夹持件与所述第一气缸连接,所述第一夹持件包括第三夹持部和第四夹持部,所述第三夹持部呈弧形,所述第四夹持部从所述第三夹持部背离所述第一气缸的一端延伸出,所述第四夹持部的宽度小于第三夹持部的宽度;
9、所述第二机械手包括第二气缸和第二夹持件,所述第二夹持件与所述第二气缸连接,所述第二夹持件包括第五夹持部和第六夹持部,所述第五夹持部呈弧形,所述第六夹持部从所述第五夹持部背离所述第二气缸的一端延伸出,所述第六夹持部的宽度小于第五夹持部的宽度;
10、所述第一机械手和第二机械手均包括机械臂,所述机械臂分别与第一气缸、第二气缸连接。
11、可选地,所述落杯器包括:
12、筒主体,所述筒主体具有贯穿的空腔;
13、定位构件,所述定位构件用于与所述杯体组抵接;
14、夹持构件,所述夹持构件用于夹持所述杯体组;
15、搭接构件,所述杯体组搭接于所述搭接构件上;
16、所述定位构件、所述夹持构件和所述搭接构件依次设置在所述空腔内,
17、传感器,设于所述筒主体上,所述传感器用于检测所述杯体组以发出控制信号;
18、控制器,所述传感器和所述夹持构件分别与所述控制器电连接,所述控制器根据控制信号控制所述夹持构件松开或夹紧。
19、可选地,所述定位构件包括多个延伸条,所述延伸条从靠近所述夹持构件的位置朝向所述空腔的开口延伸,多个延伸条呈圆周间隔布置。
20、可选地,所述延伸条包括连接部、延长部和抵接部,所述连接部固定于靠近所述夹持构件的位置,所述延长部连接于所述连接部和所述抵接部,所述抵接部在远离所述延长部的方向上距离所述空腔的侧壁逐渐减小然后逐渐增大,所述延长部到所述空腔的侧壁之间的距离不变。
21、可选地,所述夹持构件包括滑动座、驱动件、第一滑块、第二滑块、连杆、第一夹爪和第二夹爪;所述滑动座包括第一滑槽和第二滑槽,所述驱动件安装在所述滑动座上,所述第一滑块滑动安装于所述第一滑槽上,所述第二滑块滑动安装于所述第二滑槽上,所述连杆连接于所述第一滑块和所述第二滑块,所述第一夹爪和所述第二夹爪分别安装在不同的所述第二滑块上,所述驱动件用于驱动所述第一滑块沿第一方向滑动,所述第一滑块移动带动所述第二滑块沿第二方向往复移动,进而带动所述第一夹爪和所述第二夹爪。
22、可选地,所述第一夹爪包括第一固定部和与所述第一固定部连接的第一夹持部,所述第一固定部与所述第二滑块连接,所述第一夹持部位于所述空腔内,所述第一夹持部的形状与所述杯体组相适配,在所述筒主体的轴向方向上,所述第一夹持部的尺寸大于所述第一固定部的尺寸;
23、所述第二夹爪包括第二固定部和与所述第二固定部连接的第二夹持部,所述第二固定部与所述第二滑块连接,所述第二夹持部位于所述空腔内,所述第二夹持部的形状与所述杯体组相适配,在所述筒主体的轴向方向上,所述第二夹持部的尺寸大于所述第二固定部的尺寸。
24、可选地,所述搭接构件包括搭接件和弹性件,所述搭接件可转动安装于所述筒主体的内壁上,所述弹性件一端与所述筒主体的内壁抵接,另一端与所述搭接件抵接,所述搭接件可朝向远离所述夹持构件的方向转动。
25、可选地,所述搭接件包括固定部和活动部,所述固定部一端固定安装于所述筒主体的内壁,另一端与所述活动部连接,所述活动部朝向所述夹持构件的一侧具有预设曲率的弧面。
26、可选地,所述搭接件具有搭接位和下落位,所述搭接件设有多个,多个所述搭接件呈圆周间隔分布,当搭接件位于所述搭接位时,所述搭接件围合形成的圆周直径小于所述杯体组的直径,当搭接件位于所述下落位时,所述搭接件围合形成的圆周直径大于或等于所述杯体组的直径。
27、本发明的第二个目的的在于提供一种基于双臂协作的全自动咖啡冲泡装置的控制方法,包括:
28、s1:启动全自动咖啡冲泡装置
29、咖啡机主体,开始制作咖啡原液;
30、s2:所述第一机械手拿取所述杯体组中的一个杯子并放置到预定位,同时所述第二机械手拿取糖包并移动到所述预定位上方;
31、s3:所述第一机械手和所述第二机械手协作撕开所述糖包并使糖放入位于所述预定位的杯子里;
32、s4:所述第一机械手移动到制作位拿取研磨好的咖啡原液,并将研磨好的咖啡原液倒入位于所述预定位的杯子里;
33、s5:所述第二机械手拿取搅拌器,并伸入到位于所述预定位的杯子里搅拌。
34、可选地,在执行步骤s1之后和执行步骤s4之前,还包括以下步骤:
35、s6:所述第二机械手拿取奶罐,并再将奶罐中的鲜奶挤入位于所述预定位的杯子里。
36、可选地,所述第一机械手和所述第二机械手协作撕开所述糖包并使糖放入位于所述预定位的杯子里包括:
37、由第二机械手夹持住糖包口部,第一机械手夹持住糖包一个角落,此时第一机械手相对第二机械手做远离运动,使糖包出现一个缺口,并将糖沿缺口倒入位于预定位的杯子里。
38、与现有技术相比,本发明的有益效果在于:
39、在一实施例中,发明提供的一种基于双臂协作的全自动咖啡冲泡装置,包括咖啡机主体、落杯器、置物台、机械手组件;其中,由咖啡机主体制作咖啡原液,由机械手组件从落杯器拿取杯子,从置物台拿取糖包、奶罐、搅拌器;并由机械手组件中的第一机械手和第二机械手协作配合,实现加糖加奶的操作,本发明提供的装置只需要接收一个制作指令,即可全自动完成整个咖啡加糖加奶的流程,极大的提供了便利性。
40、又一个实施例中,本发明提供的一种基于双臂协作的全自动咖啡冲泡装置的控制方法,通过机械手组件拿取杯子并放置到预设的固定位置,再依次通过第一机械手和第二机械手的双臂协作加入咖啡原液、糖和牛奶制成咖啡,实现咖啡的全自动化制备。
- 还没有人留言评论。精彩留言会获得点赞!