一种负压吸附轻松越障灵活作业智能擦窗机器人
本发明属于机器人,尤其涉及一种负压吸附轻松越障灵活作业智能擦窗机器人。
背景技术:
1、随着城市化进程的加快,采用玻璃幕墙的高层建筑逐步增多,窗户清洁成为一大难题。对于高层建筑的外用玻璃和住宅建筑的窗户表面清洁,不仅损耗人力财力,而且清洁工人在高空作业的安全难以保障,所以擦窗机器人应运而生。
2、根据大量的市场调查,发现目前市面上的擦窗机器人主要存在以下问题:
3、1.安全性问题:由于擦窗机器人通常在高楼外部工作,安全是最重要的考虑因素。目前的技术仍然需要进一步提高机器人的稳定性和可靠性,以确保机器人能够在高风、强风等恶劣天气条件下工作,并防止机器人意外坠落。
4、2.适应性问题:窗户的形状、尺寸以及表面材料的多样性导致擦窗机器人难以适应各种窗户情况。机器人需要能够准确感知窗户的大小和形状,并灵活调整清洁策略和路径规划,以适应不同的窗户类型。
5、3.清洁效果问题:擦窗机器人需要能够彻底清洁窗户表面的污垢,包括灰尘、垃圾等。然而,目前的清洁系统清洁效果仍然较差,机器人的清洁效果有待提高。
6、4.导航和避障问题:擦窗机器人需要准确感知窗户的位置和障碍物,并能够智能地规划清洁路径,目前擦窗机器人领域应用导航和避障技术有待提高。
7、5.电量和续航问题:擦窗机器人需要具备足够的电池寿命来完成清洁任务。但是,目前的电池技术仍然有限,机器人的续航能力有待提高。特别是在完成大型建筑物的清洁任务时,机器人需要多次充电才能完成工作。
8、6.价格问题:目前擦窗机器人的价格相对较高,限制了其在市场上的普及和推广。
9、针对目前擦窗机器人技术现状,本发明向安全化、轻便化、效率提升、清洁程度等方向进行改良和提升。
技术实现思路
1、针对现有技术存在的问题,本发明提供了一种新型智能擦窗机器人,通过吸附机构、越障机构、清扫装置、擦洗装置与辅助装置的配合使用,解决了现有真空吸附式擦窗机器人与玻璃之间接触强度低、难跨越、工作效率低的问题。
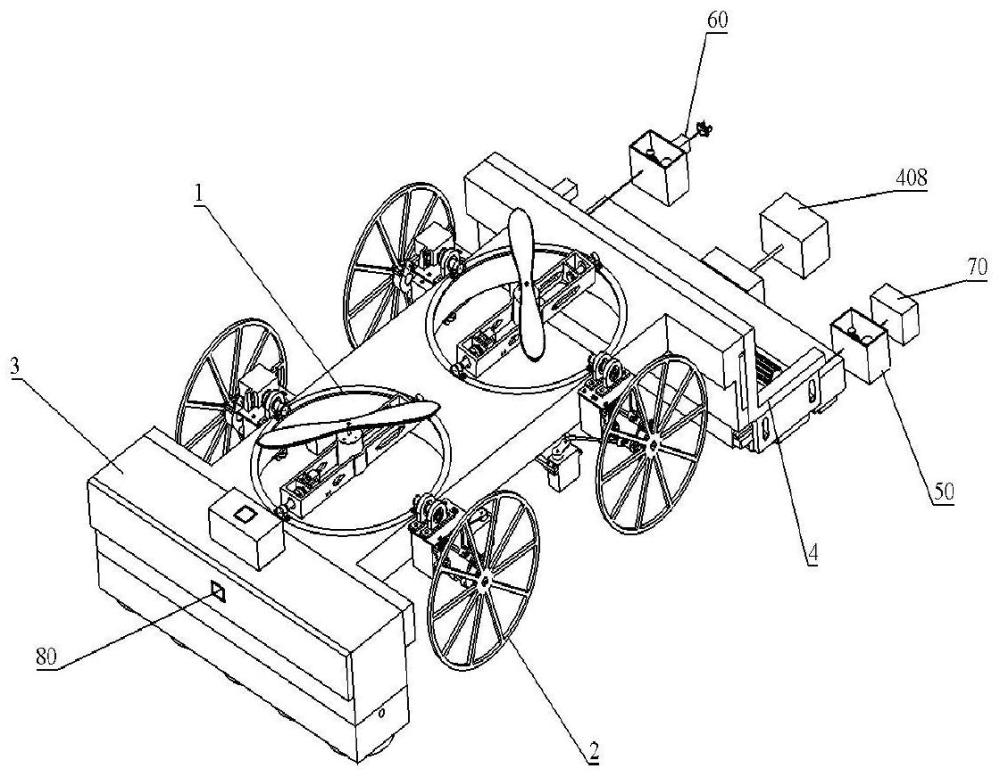
2、本发明是这样实现的,一种负压吸附轻松越障灵活作业智能擦窗机器人,所述负压吸附轻松越障灵活作业智能擦窗机器人设有主机架,主机架上安装有吸附机构和越障机构。
3、吸附机构由调节圈内部的控制骨架通过伺服电机连接螺旋桨叶片,由伺服电机以稳定转矩驱动螺旋桨叶片快速旋转,从而在玻璃表面产生负压吸附力实现吸附功能。
4、越障机构由螺旋桨控制平台控制导向轴,导向轴连接调节圈,通过调节螺旋桨机构与玻璃表面的相对角度为机器人行走和转向提供动力,完成机器人的越障功能。
5、进一步,负压吸附轻松越障灵活作业智能擦窗机器人采用大尺寸车轮行走,配合转向系统实现擦窗机器人灵活清洁作业;
6、越障机构由控制器连接转向系统,实现机器人转向及掉头功能;转向系统由舵机盘驱动曲柄摇杆机构带动车轮转向;越障装置关于主机架结构对称,四轮均配备转向装置,使机器人具有较高的灵活度,可实现小半径转弯功能、转向及掉头功能,使其适用于大片、分块的玻璃面清洁工作。
7、越障装置关于主机架结构对称,四轮均配备转向装置,使机器人具有较高的灵活度,可实现小半径转弯功能、转向及掉头功能,使其适用于大片、分块的玻璃面清洁工作。
8、进一步,清扫装置安装在主机架前端,通过吸尘泵和环形毛刷的配合清扫玻璃表面及窗格等边角位置;
9、清扫装置上安装有限位件,通过滑动于安装架上的限位槽调节清扫装置高度,使清扫装置充分接触玻璃表面,保证清洁质量;
10、清扫装置外壳内设有安装腔、吸尘通道以及汇聚腔,以上结构关于外壳中心对称;环形毛刷呈线性阵列安装在容纳腔内,其环形结构更易清扫玻璃边角位置;吸尘泵通过吸尘通道吸附玻璃表面尘土以及杂物;旋风锥安装在安装腔内部,在旋风锥的作用下,空气排出体外,尘土及杂物落入安装腔内;安装腔可拆卸连接,定期清除外壳杂物;汇聚腔的腔面成凹弧形设置,引导空气气流流向吸尘通道内。
11、进一步,擦洗装置通过安装架连接在主机架后端,通过第一支架和第二支架上限位件配合调节擦洗装置高度,保证滚刷充分接触玻璃表面;
12、滚轴与动力组件传动连接,滚轴表面设有多根刮条,由滚轴刮条带动滚刷清洗玻璃表面;喷淋室悬置于滚刷表面上方,由供水装置通过软管为滚刷表面供水,实现擦洗装置持续作业;滚刷外部设置收污装置,收污装置根据真空泵真空吸附的原理吸附滚刷面经滚轴刮条挤压流出的污水,通过污水管将污水排出,外部设置一污水处理装置,污水净化后为擦洗装置循环供水,可实现环保、节约的社会需求。
13、进一步,辅助装置包括安全装置、供电装置、供水装置以及控制装置,通过辅助装置与清洁模块的配合使用,完成擦窗机器人防坠、供水、供电、收污与控制“五位一体化”清洁功能,实现机器人持续安全作业。
14、进一步,擦窗机器人在本体外部设置安全装置,为机器人运行提供安全措施;安全装置通过安全绳连接机器人本体,发生跌落时止锁机构能够第一时间将绕线盘锁定,防止机器人发生坠落造成安全事故。
15、进一步,电机模块由供电系统提供电源,电源适配器用于将交流电转换为直流电为擦窗机器人本体供电;供水装置由外部吸水泵为擦洗装置的喷淋室供水,供水装置与同样在机器人远端的污水处理装置通过软管连接,为擦窗机器人循环供水,实现擦窗机器人的收污功能。
16、进一步,控制装置分别与吸附机构、越障机构、清扫装置、擦洗装置以及辅助装置电连接;当擦窗机器人进行清洁作业时,控制装置“一键启动”,供电装置为各模块供电,擦窗机器人开始工作;
17、控制装置,其特征在于,传感模块连接控制器,用于获取环境数据并通过传感模块发送至控制器内,以使控制模块根据环境数据规划行走路线,控制擦窗机器人各模块的工作状态。
18、进一步,安全装置安装于擦窗机器人外部两侧,其结构对称;安装在机器人远端的供电装置将电缆兼作为安全绳,通过出线孔连接安全装置,安装在机器人另一端的供水装置将软管亦作为安全绳连接安全装置,结构在减轻擦窗机器人重量的同时,也防止机器人坠落时失衡碰撞玻璃表面,通过供水、供电以及防坠功能三合一实现机器人持续性清洁作业。
19、结合上述的技术方案和解决的技术问题,本发明所要保护的技术方案所具备的优点及积极效果为:
20、第一,本发明通过负压式作用原理吸附在窗户表面,克服现有真空吸附式机器人易打滑的缺点;采用车轮式越障机构使擦窗机器人工作简捷,轻松越障且灵活作业;通过擦洗装置和清扫装置的配合使用,使擦窗机器人更有效、更全面清洁窗户表面;通过辅助装置(安全装置,供电装置、供水装置、控制装置)之间的配合使用,使擦窗机器人具备完整的清洁系统。相比于现有擦窗机器人,本发明能够无死角清洗玻璃表面,自动规划行走路线,供水、供电、控制、安保以及收污“五位一体化”不间断安全作业,具有高效、便捷、安全、自动、智能的功能特点。
21、第二,本发明通过各模块之间的相互作用,形成了一个玻璃幕墙清洁系统。本发明优点如下:结合螺旋桨结构功能特性实现机器人吸附及越障双重功能,减少成本,优化机器人功能;供电、供水、安全绳一体化使机器人实现持续作业,克服目前市场上擦窗机器人续航能力弱,无法持续作业的难题;监测装置与传感装置使机器人具备发展前沿的定位及导航优势;控制系统实现机器人智能规划路径且操作简单,使机器人极具市场竞争力;前后端吸尘与擦洗模块的相互配合清洁,提高清洁效率,克服了玻璃表面清洗不充分、不全面的清洁难题;机器人后端两侧对称的防坠结构为机器人提供了双重安全保护,最大程度上保证了机器人安全功能的稳定性。
22、第三,作为本发明的权利要求的创造性辅助证据,还体现在以下几个重要方面:
23、(1)本发明的技术方案转化后的预期收益和商业价值为:
24、提高效率:擦窗机器人将大幅提高擦窗作业的效率,相比传统的人工擦窗,机器人可以更快速、持续地完成任务。这将减少人力成本和时间成本,并提高工作效率。
25、提升安全性:擦窗机器人能够在高楼外部作业,减少了人力擦窗过程中的危险和安全隐患。机器人配备的安全装置和传感器可以有效预防意外坠落和事故发生,为工作环境提供更安全的条件。
26、节省人力成本:传统的窗户清洁工作需要大量的人力投入。引入擦窗机器人后,减少了对专业擦窗人员的需求,从而降低了人力成本。同时,机器人可以连续工作,节省了雇佣和培训人员的费用。
27、扩大应用范围:擦窗机器人不仅适用于商业建筑,还可以用于家庭和其他公共场所。这将扩大市场需求和商业机会,提升技术方案的商业价值。
28、提升服务质量:擦窗机器人具备智能化的清洁系统和导航技术,能够提供更加精确、一致的清洁服务。机器人操作准确无误,不会因为疲劳或人为因素而影响工作质量,提高了清洁效果的一致性和可靠性。
29、品牌价值和市场竞争力:作为一项创新技术,引入擦窗机器人将为企业增加品牌价值,并提升在市场上的竞争力。成为行业领先者,将有助于吸引更多客户和合作伙伴,为企业带来更多商机和合作机会。
30、综上所述,擦窗机器人技术方案的成功转化将为企业带来多方面的收益和商业价值,包括提高效率、节省成本、提升安全性、扩大市场份额以及提升品牌价值和竞争力等。这一技术的应用前景广阔,将为清洁行业带来革命性的变革。
31、(2)本发明的技术方案解决了人们一直渴望解决、但始终未能获得成功的技术难题:
32、外部因素:擦窗机器人操作的窗户的材料和形状会影响其性能。例如,窗户表面的高度差、窗户边角的形状等,使机器人无法完全清洁到所有区域。本发明擦窗机器人关于清扫装置的技术方案中,通过毛刷的环形结构以及吸尘装置的吸尘使机器人最大程度清扫玻璃边角及窗格区域,实现玻璃表面的全面清洁功能。
33、传感器限制:擦窗机器人通常使用传感器来感知窗户的位置和障碍物。然而,这些传感器无法100%准确地检测窗户的边界或障碍物的位置,导致机器人在某些情况下无法正确操作。本发明擦窗机器人在控制系统的技术方案中,传感器装置中的红外线发射模块选用遥控器芯片ht6221。该芯片发送的红外线信号可以经过调制装置调制,然后通过红外线发射二极管进行发送。当发射按键按下一定的时间,振荡器激活内部的芯片。ht6221有自己的编码规则,发射器不同的按键对应不同的功能,可以用于控制机器人的启动、前进、后退、左转、右转,还可以实现机器人手动、自动模式运行切换。在机器人运行过程中无法正确操作时切换手动控制模式,保证机器人正常运行。
34、清洁效果:虽然擦窗机器人可以提供一定的清洁效果,但机器人系统无法与手动擦窗一样完全清洁。本发明技术方案结合清扫装置与清洗装置,吸尘、清扫、喷淋、擦洗、收污五大功能的配合清洁下,提高擦窗机器人的清洁效率,最大程度上提升擦窗机器人的清洁效果。
35、(3)本发明的技术方案克服了技术偏见:
36、市场上现有的擦窗机器人出现了“擦的不干净”、“价格贵”、“不够智能”等偏见。本发明机器人致力于打造产品轻便化,高效率,低成本的预期目标,所述擦窗机器人电源端供电,安全绳与电缆和水管合二为一,减轻机器人重量的同时节省成本;控制系统中控制器、监测装置以及传感装置的相互配合下,不仅使擦窗机器人自动规划路线,且实现了机器人自动与手动灵活切换,极大提高机器人智能化水平。本发明技术方案结合清扫装置与擦洗装置双重清洁,且自主完成吸尘、清扫、喷淋、擦洗、收污,提高擦窗机器人的清洁效率,最大程度保证擦窗机器人的清洁效果。
37、第四,本发明的负压吸附轻松越障灵活作业智能擦窗机器人的设计带来了以下显著的技术进步:
38、1)高效的吸附机制:通过调节圈内部的控制骨架和伺服电机连接螺旋桨叶片,机器人能够在玻璃表面产生负压吸附力,实现稳固吸附。这种吸附机制使机器人能在垂直或倾斜的玻璃面上稳定工作,显著提高了清洁效率和安全性。
39、2)灵活的越障能力:越障机构的设计,通过调节螺旋桨机构与玻璃表面的相对角度,为机器人提供了有效的行走和转向动力。这种设计使机器人能够轻松越过窗格和边角等障碍物,提高了清洁作业的灵活性和全面性。
40、3)先进的清扫装置:机器人的清扫装置结合吸尘泵和环形毛刷,能够高效清扫玻璃表面及窗格边角。环形毛刷的线性阵列和旋风锥的设计提高了清扫效率,并确保了清洁质量。
41、4)增强的机动性和灵活性:四轮转向系统的设计,配合大尺寸车轮行走,使机器人在清洁作业中具有较高的灵活度。机器人能实现小半径转弯、转向和掉头,适应各种复杂环境,特别是在大片或分块的玻璃面清洁中表现出色。
42、5)易于维护和清理:清扫装置中的安装腔设计为可拆卸连接,方便定期清除外壳内的杂物,降低了维护难度和成本。
43、6)提升清洁效果的细节设计:清扫装置的高度调节功能和汇聚腔的凹弧形设置,都有助于确保清洁过程中毛刷与玻璃表面的充分接触,以及高效的空气和尘土流动,从而提升清洁效果。
44、本发明的智能擦窗机器人在清洁效率、操作灵活性、安全性、维护便捷性以及清洁质量方面都实现了显著的技术进步,代表了智能清洁设备领域的一大创新。
- 还没有人留言评论。精彩留言会获得点赞!