一种智能除铁机器人的制作方法
本发明涉及除铁机器人,具体为一种智能除铁机器人。
背景技术:
1、通常在汽车修理厂等工作场所以及家庭居室中,若地面散落有铁屑、铁钉等废铁,就需要使用到除铁设备对铁屑铁钉进行清理,避免对人和设备造成伤害。除铁设备的原理通常是利用磁铁对铁屑铁钉进行吸附。
2、现有的除铁设备通常功能单一,如常用的杠杆手柄磁性清道夫,只是在手柄连接的尾部安装轮子和磁铁,通过推动手柄带动装置在建筑内边行走边吸附铁屑铁钉。其结构也较为简单,依赖人力使用,无法适应现代化家居和智能生产车间减少人力消耗,实现自动除铁的需求。
技术实现思路
1、本发明提供了一种智能除铁机器人,具备通过将磁吸模组安装在智能机器人上实现对地面上的铁屑铁钉进行自动清理,无需手动清理,磁吸模组还具备自动分类收集铁屑和铁钉的功能,扩大容量无需经常清理的有益效果,解决了上述背景技术中所提到的现有的除铁设备通常功能单一,结构也较为简单,依赖人力使用,无法适应现代化家居和智能生产车间减少人力消耗,实现自动除铁的需求的问题。
2、本发明提供如下技术方案:一种智能除铁机器人,包括智能机器人主体,所述智能机器人主体上设置有驱动模组和若干个磁吸模组,所述驱动模组包括设置于所述智能机器人主体下侧的驱动轮;
3、所述磁吸模组包括设置于所述智能机器人主体下侧的壳体,所述壳体内设置有圆柱形电磁铁,通过所述圆柱形电磁铁运行将铁屑和若干铁钉吸附在所述壳体的表面;
4、所述磁吸模组还包括铁屑收集机构和铁钉收集机构,所述铁屑收集机构包括开设于所述壳体下侧的环形收集槽,所述环形收集槽内滑动设置有第一密封块,所述第一密封块上设置有第一环形电磁铁;
5、通过所述第一密封块升起和所述第一环形电磁铁运行产生磁吸力,同时所述圆柱形电磁铁停止运行,使得铁屑吸附进所述环形收集槽内进行收集。
6、作为本发明所述一种智能除铁机器人的一种可选方案,其中:所述铁屑收集机构还包括滑动设置于所述壳体内的铁屑收集筒,所述铁屑收集筒上设置有筒盖,所述铁屑收集筒上开设有收集仓口,所述壳体内开设有连通槽,所述环形收集槽通过所述连通槽与所述收集仓口连通;
7、通过所述圆柱形电磁铁重新运行并产生大于所述第一环形电磁铁的磁吸力使得铁屑被吸附进所述铁屑收集筒内进行收集。
8、作为本发明所述一种智能除铁机器人的一种可选方案,其中:所述铁屑收集机构还包括开关组件,所述开关组件包括开设于所述铁屑收集筒上的第一滑槽,所述第一滑槽与所述收集仓口连通,所述第一滑槽内滑动设置有第二密封块,所述第二密封块上开设有与所述收集仓口适配的镂空槽;
9、所述第二密封块上设置有连接块,所述壳体上侧设置有第一电动推杆,所述壳体内滑动设置有与所述连接块适配的拉杆,所述第一电动推杆的输出轴与所述拉杆连接。
10、作为本发明所述一种智能除铁机器人的一种可选方案,其中:所述铁钉收集机构包括设置于所述壳体内的两个第二电动推杆,两个所述第二电动推杆的输出轴上均设置有环形推块,两个所述环形推块分别设置于所述环形收集槽的内圈和外圈,通过所述第一密封块继续升起和两个所述环形推块下降使得若干铁钉吸附在所述第一密封块的下侧。
11、作为本发明所述一种智能除铁机器人的一种可选方案,其中:所述铁钉收集机构还包括开设于所述壳体内的铁钉通道,所述铁钉通道与铁钉的形状契合,所述壳体内转动设置有铁钉收集筒,所述铁钉收集筒上周向开设有若干个与所述铁钉通道适配的l形槽,所述铁钉收集筒上滑动设置有第二环形电磁铁;
12、通过所述第一密封块带动若干铁钉升起至所述铁钉通道位置时,通过所述第二环形电磁铁运行产生大于所述第一环形电磁铁的磁吸力,同时所述铁钉收集筒和所述第二环形电磁铁旋转,使得若干铁钉一一吸附至若干个所述l形槽内,再通过所述第二环形电磁铁升起带动若干铁钉升起至若干所述l形槽的上侧。
13、作为本发明所述一种智能除铁机器人的一种可选方案,其中:若干个所述l形槽的上侧均设置有截停组件,所述截停组件包括开设于所述l形槽侧壁的第二滑槽,所述第二滑槽内滑动设置有卡扣,所述卡扣通过弹簧与所述第二滑槽的内壁弹性连接。
14、作为本发明所述一种智能除铁机器人的一种可选方案,其中:所述磁吸模组还包括驱动机构,所述驱动机构用于驱动所述第一环形电磁铁和所述第二环形电磁铁升降以及旋转;
15、所述驱动机构包括设置于所述壳体上侧的壳盖,所述壳盖内设置有第三电动推杆,所述第三电动推杆的输出轴上设置有连接座,所述连接座上转动设置有插杆,所述第一环形电磁铁和所述第二环形电磁铁上均设置有与所述插杆适配的插座;
16、所述连接座上设置有电机,所述电机的输出轴和所述插杆上均设置有齿轮,两个所述齿轮啮合。
17、作为本发明所述一种智能除铁机器人的一种可选方案,其中:所述连接座上设置有集电环和第三导线,所述插杆内设置有第一导线和第二导线分别用于连接所述第一环形电磁铁和所述第二环形电磁铁。
18、作为本发明所述一种智能除铁机器人的一种可选方案,其中:所述驱动模组还包括设置于所述智能机器人主体上的激光雷达、超声波避障雷达、状态指示灯和从动轮。
19、作为本发明所述一种智能除铁机器人的一种可选方案,其中:还包括充电模组,所述充电模组用于对所述智能机器人主体进行充电。
20、本发明具备以下有益效果:
21、1、该智能除铁机器人,通过将磁吸模组安装在智能机器人主体上,为智能机器人主体配备驱动模组,使其可以在地面根据制导自动设置路线,实现自动对地面上的铁屑铁钉进行吸附清理。从而无需人工操作来对地面进行除铁,填补现在智能家居和智能工厂领域里缺乏智能除铁机器人的空白。
22、2、该智能除铁机器人,对于传统的磁铁或电磁铁只能通过通断电来吸附铁屑铁钉或掉落的单一功能作出改进。在驱动模组中,除用于吸附铁屑铁钉的圆柱形电磁铁外,还设置有铁屑收集机构和铁钉收集机构,实现对铁屑铁钉的分类收集。扩大了容量,避免壳体表面被吸附满铁屑铁钉后需要人工清理才能继续作业的问题。同时考虑到对铁屑铁钉的回收利用,实现分类后也可避免人工从收集物中分离出铁钉时出现扎手的危险。
23、3、该智能除铁机器人,具体分类收集时,首先壳体下侧的环形收集槽打开,令铁钉卡在环形收集槽处,而铁屑则通过圆柱形电磁铁和第一环形电磁铁的磁力变化控制从环形收集槽进入壳体内的铁屑收集筒内进行分类收集,且铁屑收集筒可从壳体上侧取出,可以方便的对铁屑进行清理或回收利用。
24、而铁屑收集完后,则将铁钉一一收集入铁钉收集筒上周向设置的若干个l形槽内,通过打开壳盖,可从一个个l形槽内将大部分为钉头部朝上的铁钉取出,不仅提高了安全性,而且非常便捷。
技术特征:
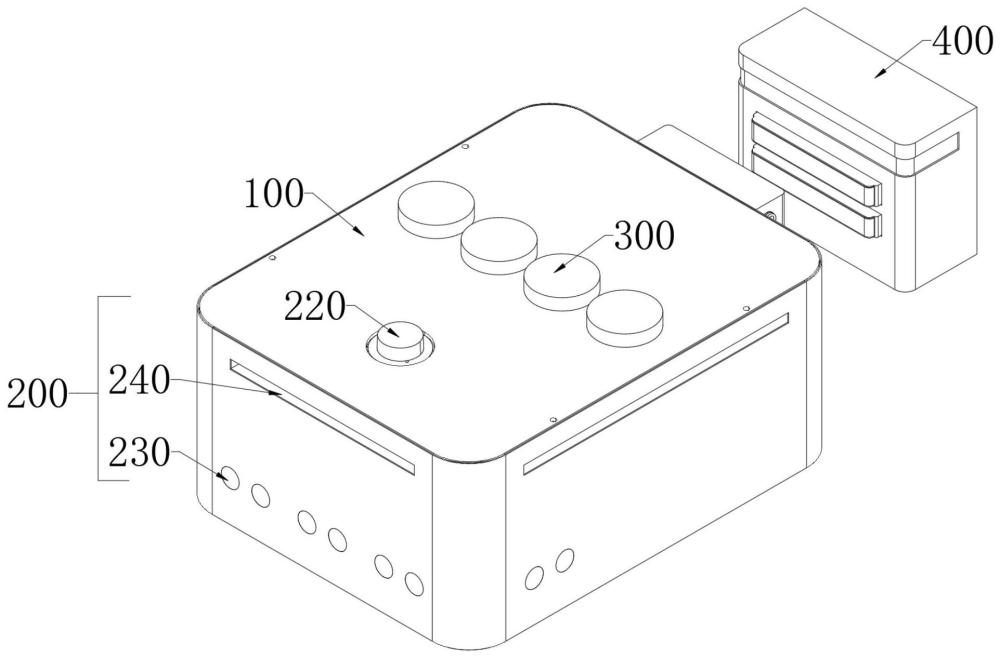
1.一种智能除铁机器人,包括智能机器人主体(100),其特征在于:所述智能机器人主体(100)上设置有驱动模组(200)和若干个磁吸模组(300),所述驱动模组(200)包括设置于所述智能机器人主体(100)下侧的驱动轮(210);
2.根据权利要求1所述的一种智能除铁机器人,其特征在于:所述铁屑收集机构(330)还包括滑动设置于所述壳体(310)内的铁屑收集筒(334),所述铁屑收集筒(334)上设置有筒盖(337),所述铁屑收集筒(334)上开设有收集仓口(335),所述壳体(310)内开设有连通槽(336),所述环形收集槽(331)通过所述连通槽(336)与所述收集仓口(335)连通;
3.根据权利要求2所述的一种智能除铁机器人,其特征在于:所述铁屑收集机构(330)还包括开关组件(338),所述开关组件(338)包括开设于所述铁屑收集筒(334)上的第一滑槽(3381),所述第一滑槽(3381)与所述收集仓口(335)连通,所述第一滑槽(3381)内滑动设置有第二密封块(3382),所述第二密封块(3382)上开设有与所述收集仓口(335)适配的镂空槽(3383);
4.根据权利要求1所述的一种智能除铁机器人,其特征在于:所述铁钉收集机构(340)包括设置于所述壳体(310)内的两个第二电动推杆(341),两个所述第二电动推杆(341)的输出轴上均设置有环形推块(342),两个所述环形推块(342)分别设置于所述环形收集槽(331)的内圈和外圈,通过所述第一密封块(332)继续升起和两个所述环形推块(342)下降使得若干铁钉(500)吸附在所述第一密封块(332)的下侧。
5.根据权利要求4所述的一种智能除铁机器人,其特征在于:所述铁钉收集机构(340)还包括开设于所述壳体(310)内的铁钉通道(343),所述铁钉通道(343)与铁钉(500)的形状契合,所述壳体(310)内转动设置有铁钉收集筒(344),所述铁钉收集筒(344)上周向开设有若干个与所述铁钉通道(343)适配的l形槽(345),所述铁钉收集筒(344)上滑动设置有第二环形电磁铁(346);
6.根据权利要求5所述的一种智能除铁机器人,其特征在于:若干个所述l形槽(345)的上侧均设置有截停组件(347),所述截停组件(347)包括开设于所述l形槽(345)侧壁的第二滑槽(3471),所述第二滑槽(3471)内滑动设置有卡扣(3472),所述卡扣(3472)通过弹簧(3473)与所述第二滑槽(3471)的内壁弹性连接。
7.根据权利要求5所述的一种智能除铁机器人,其特征在于:所述磁吸模组(300)还包括驱动机构(350),所述驱动机构(350)用于驱动所述第一环形电磁铁(333)和所述第二环形电磁铁(346)升降以及旋转;
8.根据权利要求7所述的一种智能除铁机器人,其特征在于:所述连接座(353)上设置有集电环(360)和第三导线(390),所述插杆(354)内设置有第一导线(370)和第二导线(380)分别用于连接所述第一环形电磁铁(333)和所述第二环形电磁铁(346)。
9.根据权利要求1所述的一种智能除铁机器人,其特征在于:所述驱动模组(200)还包括设置于所述智能机器人主体(100)上的激光雷达(220)、超声波避障雷达(230)、状态指示灯(240)和从动轮(250)。
10.根据权利要求1所述的一种智能除铁机器人,其特征在于:还包括充电模组(400),所述充电模组(400)用于对所述智能机器人主体(100)进行充电。
技术总结
本发明涉及除铁机器人技术领域,且公开了一种智能除铁机器人,包括智能机器人主体,智能机器人主体上设置有驱动模组和若干个磁吸模组,驱动模组包括设置于智能机器人主体下侧的驱动轮;磁吸模组包括设置于智能机器人主体下侧的壳体,壳体内设置有圆柱形电磁铁,通过圆柱形电磁铁运行将铁屑和若干铁钉吸附在壳体的表面;磁吸模组还包括铁屑收集机构和铁钉收集机构,铁屑收集机构包括开设于壳体下侧的环形收集槽,环形收集槽内滑动设置有第一密封块;该智能除铁机器人,将磁吸模组安装在智能机器人上实现对地面上的铁屑铁钉进行自动清理,无需手动清理,磁吸模组还具备自动分类收集铁屑和铁钉的功能,扩大容量无需经常清理。
技术研发人员:周吉林,周吉文,王克凡,王克标,王蓉,赵文强
受保护的技术使用者:周吉林
技术研发日:
技术公布日:2024/3/4
- 还没有人留言评论。精彩留言会获得点赞!