清洁机器人的控制方法和装置、设备及介质与流程
本技术涉及机器人,尤其涉及一种清洁机器人的控制方法和装置、设备及介质。
背景技术:
1、随着计算机技术和嵌入式技术的发展,各种清洁机器人如扫地机器人、拖地机器人等应运而生。目前,用户可以在app(应用程序)上通过虚拟按键或语音等方式与清洁机器人进行交互,清洁机器人可以按照交互指令在指定区域自行行进并进行清洁或清除等操作。
2、然而,目前只能向清洁机器人发送固定指令,对于用户而言,固定指令不能满足用户多样化和个性化的配置功能需求。因而,亟待解决这一技术问题。
技术实现思路
1、鉴于上述问题,提出了本技术以便提供一种克服上述问题或者至少部分地解决上述问题的清洁机器人的控制方法和装置、设备及介质。所述技术方案如下:
2、第一方面,提供了一种清洁机器人的控制方法,应用于配置端,所述方法包括:
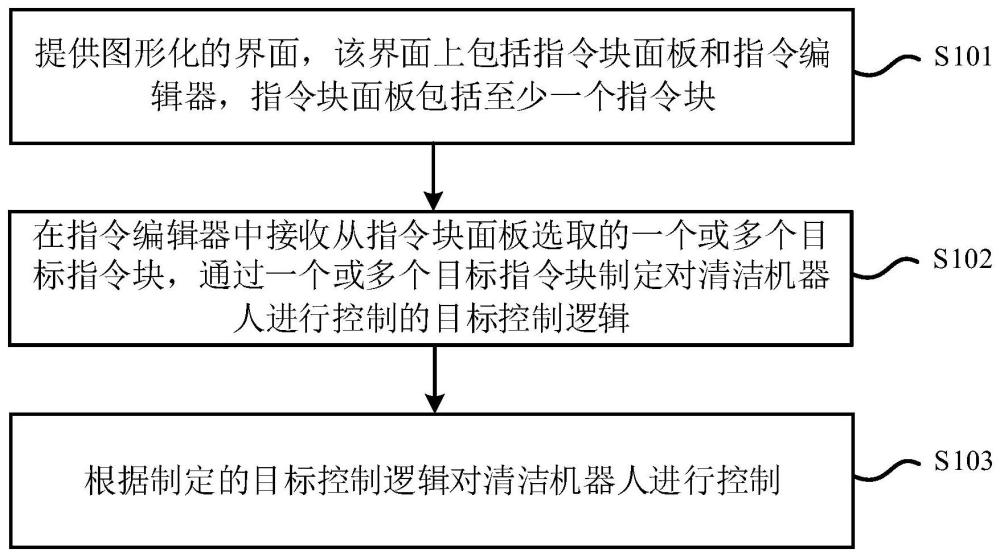
3、提供图形化的界面,所述界面上包括指令块面板和指令编辑器,所述指令块面板包括至少一个指令块;
4、在所述指令编辑器中接收从所述指令块面板选取的一个或多个目标指令块,通过所述一个或多个目标指令块制定对清洁机器人进行控制的目标控制逻辑;
5、根据制定的所述目标控制逻辑对所述清洁机器人进行控制。
6、在一种可能的实现方式中,所述指令块包括至少一个一级指令块。
7、在一种可能的实现方式中,所述一级指令块下包括至少一个二级指令块。
8、在一种可能的实现方式中,在所述指令编辑器中接收从所述指令块面板选取的一个或多个目标指令块,包括:
9、在所述指令编辑器中接收从所述指令块面板的一级指令块和/或二级指令块选取的一个或多个目标指令块。
10、在一种可能的实现方式中,至少一个所述一级指令块包括人工智能指令块、清扫指令块、判断指令块、动作指令块、函数指令块、循环和分支指令块、事件指令块、其他指令块中的一种或多种。
11、在一种可能的实现方式中,若所述一级指令块包括人工智能指令块,所述一级指令块下的至少一个二级指令块包括语音识别、物体识别、污渍识别、语言识别唤醒中的一种或多种。
12、在一种可能的实现方式中,若所述一级指令块包括清扫指令块,所述一级指令块下的至少一个二级指令块包括清扫位置、清扫模式、吸力中的一种或多种。
13、在一种可能的实现方式中,通过所述一个或多个目标指令块制定对清洁机器人进行控制的目标控制逻辑,包括:
14、获取对清洁机器人进行控制所要实现的功能的说明信息;
15、基于所述功能的说明信息,通过所述一个或多个目标指令块制定对清洁机器人进行控制的目标控制逻辑。
16、第二方面,提供了一种清洁机器人的控制方法,应用于清洁机器人,所述方法包括:
17、接收来自配置端发送的目标控制代码;其中,所述目标控制代码是所述配置端根据制定的目标控制逻辑生成的,所述配置端在指令编辑器中接收从指令块面板选取的一个或多个目标指令块,通过所述一个或多个目标指令块制定对清洁机器人进行控制的目标控制逻辑;所述配置端提供图形化的界面,所述界面上包括所述指令块面板和所述指令编辑器,所述指令块面板包括至少一个指令块;
18、执行所述目标控制代码对所述清洁机器人进行控制。
19、在一种可能的实现方式中,所述清洁机器人包括代码片段管理器和代码执行器;
20、接收来自配置端发送的目标控制代码之后,所述方法还包括:
21、所述代码片段管理器存储所述目标控制代码;
22、执行所述目标控制代码对所述清洁机器人进行控制,包括:
23、所述代码片段管理器加载所述目标控制代码至所述代码执行器;
24、所述代码执行器执行所述目标控制代码,对所述清洁机器人进行控制。
25、在一种可能的实现方式中,所述清洁机器人还包括功能服务器;
26、所述代码执行器执行所述目标控制代码,对所述清洁机器人进行控制,包括:
27、所述代码执行器在执行所述目标控制代码的过程中,在涉及功能服务时,向所述功能服务器定制所述功能服务,所述功能服务器向物联网iot事件总线订阅所述功能服务对应的事件;
28、所述代码执行器监听到所述功能服务对应的事件时,执行所述功能服务对应的事件的控制代码,对所述清洁机器人进行控制。
29、在一种可能的实现方式中,所述代码执行器执行所述目标控制代码,对所述清洁机器人进行控制,包括:
30、所述代码执行器启动线程执行所述目标控制代码,并在执行所述目标控制代码的过程中,按照设定时长检查下列一项或多项的所述目标控制代码的执行情况:
31、线程是否存在;
32、事件响应的控制代码是否有异常发生;
33、所述目标控制代码的执行时长是否超出预设阈值;
34、所述清洁机器人是否有报错;
35、是否收到来自所述配置端发送的停止命令;
36、当出现线程不存在、事件响应的控制代码有异常发生、所述目标控制代码的执行时长超出预设阈值、所述清洁机器人有报错、收到来自所述配置端发送的停止命令中的一种或多种,则停止执行所述目标控制代码。
37、在一种可能的实现方式中,所述代码片段管理器加载所述目标控制代码至所述代码执行器,包括:
38、所述代码片段管理器加载所述目标控制代码至沙箱化的所述代码执行器;
39、所述代码执行器执行所述目标控制代码,对所述清洁机器人进行控制,包括:
40、所述代码执行器在沙箱中执行所述目标控制代码,对所述清洁机器人进行控制。
41、第三方面,提供了一种清洁机器人的控制装置,应用于配置端,所述装置包括:
42、显示单元,用于提供图形化的界面,所述界面上包括指令块面板和指令编辑器,所述指令块面板包括至少一个指令块;
43、制定单元,用于在所述指令编辑器中接收从所述指令块面板选取的一个或多个目标指令块,通过所述一个或多个目标指令块制定对清洁机器人进行控制的目标控制逻辑;
44、控制单元,用于根据制定的所述目标控制逻辑对所述清洁机器人进行控制。
45、第四方面,提供了一种清洁机器人的控制装置,应用于清洁机器人,所述装置包括:
46、接收单元,用于接收来自配置端发送的目标控制代码;其中,所述目标控制代码是所述配置端根据制定的目标控制逻辑生成的,所述配置端在指令编辑器中接收从指令块面板选取的一个或多个目标指令块,通过所述一个或多个目标指令块制定对清洁机器人进行控制的目标控制逻辑;所述配置端提供图形化的界面,所述界面上包括所述指令块面板和所述指令编辑器,所述指令块面板包括至少一个指令块;
47、执行单元,用于执行所述目标控制代码对所述清洁机器人进行控制。
48、第五方面,提供了一种配置端,包括处理器和存储器,其中,所述存储器中存储有计算机程序,所述处理器被配置为运行所述计算机程序以执行上述任一项所述的清洁机器人的控制方法。
49、第六方面,提供了一种存储介质,所述存储介质存储有计算机程序,其中,所述计算机程序被配置为运行时执行上述任一项所述的清洁机器人的控制方法。
50、第七方面,提供了一种清洁机器人,包括处理器和存储器,其中,所述存储器中存储有计算机程序,所述处理器被配置为运行所述计算机程序以执行上述任一项所述的清洁机器人的控制方法。
51、第八方面,提供了一种存储介质,所述存储介质存储有计算机程序,其中,所述计算机程序被配置为运行时执行上述任一项所述的清洁机器人的控制方法。
52、借由上述技术方案,本技术实施例提供的清洁机器人的控制方法和装置、设备及介质,配置端可以提供图形化的界面,该界面上包括指令块面板和指令编辑器,指令块面板包括至少一个指令块;在指令编辑器中接收从指令块面板选取的一个或多个目标指令块,通过一个或多个目标指令块制定对清洁机器人进行控制的目标控制逻辑;根据制定的目标控制逻辑对清洁机器人进行控制。可以看到,本实施例在配置端可以提供图形化的界面,用户可以根据自身多样化和个性化的需求制定目标控制逻辑,实现相应的目标功能需求,使得清洁机器人的使用场景更加丰富,提升清洁机器人的工作效率。
- 还没有人留言评论。精彩留言会获得点赞!