一种挖掘机施工引导系统及施工方法与流程
[0001]
本发明涉及测量技术领域,具体涉及一种挖掘机施工引导系统及施工方法。
背景技术:
[0002]
挖掘机包括掘机车体、动臂、斗杆以及铲斗,斗杆与动臂之间铰接,并通过斗杆液压油缸进行驱动斗杆与动臂之间发生转动,铲斗与斗杆之间铰接,并通过铲斗液压油缸驱动铲斗与斗杆之间发生转动。现有的挖掘机测量系统,一般为两gnss卫星接收天线安装在车体上,测角传感器直接安装在车体、动臂、斗杆、车体和动臂的转轴、动臂和斗杆的转轴、斗杆和铲斗的转轴、铲斗的摇杆上,推算斗齿三维坐标需要先由车体推算动臂转轴的空间位置,相比直接测量推算动臂的位姿,累加了测量推算误差,测角传感器如果选用倾角传感器,要求倾角传感器的动态测量精度高,而倾角传感器的动态测量精度相比静态测量精度差很远,故对倾角传感器的动态性能要求较高。
[0003]
测角传感器安装在铲斗和斗杆的转轴、摇杆上,其位置需要近距离接近施工对象,若施工对象较坚硬,施工时会造成较大的振动,因此要求测角传感器能高抗振,其防脱落、防碰坏的防护要求较高,如果在水下施工,测角传感器会完全泡在水中,对防水要求较高,当要拆装铲斗时,拆装铲斗测角传感器会很不方便,使用维护难度很大;测角传感器安装在斗杆、动臂和斗杆的转轴上,其位置离施工对象也较近,在施工对象较坚硬时,也要求测角传感器有较大的抗振性能,在深水施工时也要求防水性能较好,当要拆装斗杆时,拆装斗杆测角传感器会较不方便,使用维护难度较大。
[0004]
现有的带可视化的挖掘机施工引导系统施工方法,需另外加装采集实际地形的设备,加装设备时还需要在挖掘机上伸出支架安装设备以减少盲区,设备安装麻烦,但还是不可避免视角有时受铲斗的遮挡,不能实时采集斗齿处的地形数据,且实时采集、传输和处理的数据量庞大,对处理设备的性能要求高,系统运行负担较重,在水下挖泥时受浑浊水质的影响,采集地形数据质量较差,水下漂浮物、气泡影响也会带来错误的数据,环境变化不确定性因素较多,降低了系统的稳定性,故现有的挖掘机施工引导系统关注设计地形的同时没有考虑或没有处理好实际地形,不能从整体上把握避免超挖、欠挖、漏挖、重复挖现象。
技术实现要素:
[0005]
针对现有技术的不足,本发明提供一种挖掘机施工引导系统及施工方法。
[0006]
为实现上述目的,本发明的技术方案为:
[0007]
一种挖掘机施工引导系统,包括挖掘机车体、动臂、斗杆以及铲斗,所述挖掘机车体和/或动臂上设有用于测量推算动臂位姿信息的定位模块以及所述挖掘机上设有测量斗杆液压油缸和/或铲斗液压油缸的伸缩长度的测量组件,
[0008]
进一步地,还包括测量终端,所述测量终端用于接收定位模块和测量组件的测量信息;根据测量信息计算动臂、斗杆以及铲斗的位姿信息;利用软件建立施工地地形模型和铲斗模型,并根据铲斗的位姿信息确定铲斗模型的位姿,从而确定斗齿的空间位置,结合终
端显示的包含设计地形的断面图引导施工;根据斗齿的路径轨迹动态模拟施工工地地形施工情况,结合终端显示的包含设计地形和实际地形的断面图和平面图引导施工。
[0009]
进一步地,所述定位模块包括设置在动臂上的至少两个第一卫星天线以及不一定设置在动臂上的实现其卫星天线rtk测量的配套;
[0010]
还包括设置在动臂或挖掘机车体上的倾斜仪,或,
[0011]
设置在动臂上的且与其中两个第一卫星天线不处于同一空间直线上的第二卫星天线以及不一定设置在动臂上的实现其卫星天线rtk测量的配套。
[0012]
进一步地,所述测量组件包括位移传感器、测量绳、回卷装置以及套管,所述测量绳的一端与液压油缸的活动端连接,另一端与回卷装置连接,所述位移传感器用于测量测量绳拉出的长度,所述套管套设在测量绳上,所述套管的一端与液压油缸的输出端连接。
[0013]
一种挖掘机施工引导系统施工方法,包括
[0014]
根据定位模块测量推算动臂的位姿信息;
[0015]
根据测量模块及动臂的位姿信息测量推算斗杆和铲斗的位姿信息;
[0016]
根据铲斗的位姿信息确定斗齿的路径轨迹;
[0017]
利用软件建立施工地地形模型和铲斗模型,并根据铲斗的位姿信息确定铲斗模型的位姿;
[0018]
根据斗齿的路径轨迹模拟施工工地地形施工情况。
[0019]
进一步地,所述施工地地形模型包括实际地形模型和设计地形模型,所述设计地形模型为挖掘的目标地形的三维坐标数据仿真模型。
[0020]
进一步地,模拟施工工地地形施工挖掘情况时,根据斗齿的路径轨迹面调整实际地形模型的高程,得出施工后实际地形模型,通过施工后实际地形模型与设计地形模型比对,确定实际工地施工情况,具体当斗齿的路径轨迹面的坐标高程低于经过点的实际地形模型高程时,将该点实际地形模型的高程修改为当前斗齿路径轨迹面与该点竖线交点的高程。
[0021]
进一步地,所述定位模块包括设置在动臂上的至少两个第一卫星天线以及不一定设置在动臂上的实现其卫星天线rtk测量的配套;
[0022]
还包括设置在动臂或挖掘机车体上的倾斜仪,或,
[0023]
设置在动臂上的且与其中两个第一卫星天线不处于同一空间直线上的第二卫星天线以及不一定设置在动臂上的实现其卫星天线rtk测量的配套。
[0024]
进一步地,所述测量模块包括设置在挖掘机上的测量组件,所述测量组件用于测量斗杆液压油缸和/或铲斗液压油缸的伸缩长度,根据液压油缸的伸缩长度以及动臂的位姿信息得到斗杆和铲斗的位姿信息。
[0025]
进一步地,所述测量组件包括位移传感器、测量绳、回卷装置以及套管,所述测量绳的一端与液压油缸的活动端连接,另一端与回卷装置连接,所述位移传感器用于测量测量绳拉出长度,所述套管套设在测量绳上,所述套管的一端与液压油缸的输出端连接。
[0026]
本发明与现有技术相比,具有如下优点:
[0027]
本发明采用套管与测量绳来远程测量液压油缸的伸缩长度,使测量传感器远离恶劣环境,主要部件安装位置避开需要经常维修、替换的部位,维护方便;通过对铲斗的铲齿路径轨迹修改实际地形,得出施工后的实际地形模型,同步动态模拟实际地形模型、设计地
形模型及铲斗模型,界面中显示平面图和断面图,通过施工后的实际地形模型与设计地形模型比对,引导施工,确定实际工地挖掘情况,避免出现超挖、欠挖、漏挖、重复挖现象。
附图说明
[0028]
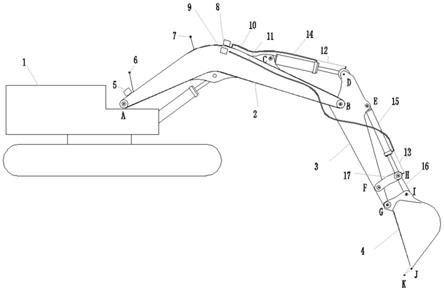
图1为挖掘机施工引导系统的整体结构示意图;
[0029]
图2为挖掘机施工引导系统的斗杆部分采用圆管和实心杆替代部分套管和测量绳的结构示意图;
[0030]
图3为挖掘机施工引导系统中根据斗齿路径修改实际地形格网点高程计算原理图;
[0031]
图4为挖掘机施工引导系统的使用方法的流程框图;
[0032]
附图标记说明:1、车体;2、动臂;3、斗杆;4、铲斗;5、倾斜仪;6、第一卫星天线;7、第二卫星天线;8、第一拉绳位移传感器;9、第二拉绳位移传感器;10、第一套管;11、第二套管;12、第一测量绳;13、第二测量绳;14、斗杆液压油缸;15、铲斗液压油缸;16、连杆;17、摇杆;18、圆管;19、实心杆。
具体实施方式
[0033]
为使本发明的上述目的、特征和优点能够更加明显易懂,下面结合附图和具体实施方式对本发明作进一步详细的说明。
[0034]
实施例
[0035]
如图1所示,一种挖掘机施工引导系统,包括挖掘机车体1、动臂2、斗杆3以及铲斗4,挖掘机上设有用于测量推算动臂2位姿信息的定位模块以及测量斗杆液压油缸14和/或铲斗液压油缸15的伸缩长度的测量组件,还包括测量终端。
[0036]
测量终端具体可为计算机,可通过串口接收定位模块和测量组件的测量信息;根据测量信息推算动臂2、斗杆3以及铲斗4的位姿信息;利用软件建立施工地地形模型和铲斗4仿真模型,并根据铲斗4的位姿信息确定铲斗4仿真模型的位姿,从而确定斗齿的位置;结合终端显示的包含设计地形的断面图引导施工;根据斗齿的路径轨迹动态模拟施工工地地形施工情况,结合终端显示的包含设计地形和实际地形的断面图和平面图引导施工。
[0037]
定位模块,采用至少两个设置在动臂2上的第一卫星天线6、7,同时在动臂2上安装倾斜仪5,从而测量求得动臂2的空间位置姿态。在该方案中,倾斜仪5的安装位置还可选安装在挖掘机车体1上,因为挖掘机车体1和动臂2的横向倾斜是一样的。而作为替代,还可以不采用倾斜仪5,而是在动臂2上额外加装至少一个第二卫星天线,两个第一卫星天线和第二卫星天线不在同一空间直线上,从而测量求得动臂2的空间位置姿态,具体第一卫星天线和第二卫星天线均采用gnss卫星接收天线,接收机采用定位定向gnss接收机。
[0038]
测量组件包括位移传感器、测量绳、回卷装置以及套管,回卷装置可安装在挖掘机的车体、动臂或斗杆上,具体在本实施例中,回卷装置安装在动臂2上,测量绳的一端与液压油缸的活动端连接,另一端与回卷装置连接,位移传感器设在回卷装置侧,用于测量测量绳拉出的长度,套管套设在测量绳上,套管的一端与液压油缸的输出端连接。具体在本实施例中,可采用拉绳位移传感器替代位移传感器、测量绳以及回卷装置,同样能起到相同的效果。
[0039]
具体到在动臂2上,测量组件包括第一拉绳位移传感器8、第一套管10以及第一测量绳12,第一位移传感器,第一拉绳位移传感器8安装在动臂2上,第一测量绳12的一端与斗杆液压油缸14的活动端连接,另一端与第一拉绳位移传感器8连接,第一套管10套设在第一测量绳12上,第一套管10的一端与斗杆液压油缸14的输出端连接。
[0040]
在斗杆3上,测量组件包括第二拉绳位移传感器9、第二套管11以及第二测量绳13,第二位移传感器,第二拉绳位移传感器9安装在动臂2上,第二测量绳13的一端与铲斗液压油缸15的活动端连接,另一端与第二拉绳位移传感器9连接,第二套管11套设在第二测量绳13上,第二套管11的一端与铲斗液压油缸15的输出端连接。
[0041]
测量模块在测量的时候,以设置在动臂2上的测量组件为例,当斗杆液压油缸14伸缩时,由于第一套管10的一端固定在斗杆液压油缸14的输出端,第一测量绳12的一端固定在斗杆液压油缸14的活动端,根据第一测量绳12在第一套管10内的长度等于第一套管10长度的原理,结合位移传感器,可测量计算出第一测量绳12与第一套管10之间的长度差,并根据该长度差与斗杆液压油缸14的伸缩长度的固有关系推断出斗杆液压油缸14的伸缩长度。
[0042]
由于套管的一端与液压油缸的输出端固定,测量绳的一端与液压油缸的活动端固定,因此液压油缸的伸缩杆上方的测量绳与伸缩杆必定是平行且长度相等的,设通过位移传感器测得的测量绳伸出长度为l1,套管的长度为l2,套管与拉绳位移传感器的出线口之间的距离为l3,露出在液压油缸上的测量绳的长度为l4,则l4=l1-l2-l3,而套管一端在液压油缸的输出端的位置是固定的,在液压油缸轴线上的投影点与液压油缸的转轴间的距离是已知固定不变的,因此即可远程算出cd和eh的长度。
[0043]
为了减少测量绳往复运动的阻力,应选用内表光滑阻力小的套管,套管应尽量少弯曲,同时可在套管内加上润滑剂。为使测量准确,要求测量绳和套管的伸缩应变小,应根据测量绳的外径大小适量选择套管的内径大小,套管的内径应比测量绳的外径大,还可在套管的两端设有环状活塞,环状活塞的外径分两段,较小的外径与套管内径相同,以插入套管的端部,较大的外径结构能够防止环状活塞整体进入套管,环状活塞的内径与测量绳的外径相同,同时还可在套管的端部加上防尘套,防止污物进入套管中。为了减少套管的长度,也可增加滑轮代替部分套管或全部套管。
[0044]
如图2所示,由于铲斗4会与施工地直接接触,因此铲斗4的测量绳h端是较易触碰的位置,该套管端的连接端可移至铲斗液压油缸15与斗杆3的转轴e处,然后利用圆管18替代部分套管,实心杆19替代部分测量绳,从而避免测量绳出现断落等情况。
[0045]
如图4所示,一种挖掘机施工引导系统施工方法,包括:
[0046]
s1、根据定位模块测得动臂2的位姿信息;
[0047]
s2、根据动臂2的位姿和测量模块测得斗杆3和铲斗4的位姿信息;
[0048]
s3、根据铲斗4的位姿信息确定斗齿的路径轨迹;
[0049]
s4、利用软件建立施工地地形模型,并建立铲斗4仿真模型,并根据铲斗4的位姿信息确定铲斗44仿真模型的位姿;
[0050]
s5、根据斗齿的路径轨迹模拟施工工地地形施工情况。
[0051]
具体地,在s1中的定位模块,采用至少两个设置在动臂2上的第一卫星天线,同时在动臂2上安装倾斜仪5,从而测量求得动臂2的空间位置姿态。在该方案中,倾斜仪5的安装位置还可选安装在挖掘机车体1上,因为挖掘机车体1和动臂2的横向倾斜是一样的。而作为
替代,还可以不采用倾斜仪5,而是在动臂2上额外加装至少一个第二卫星天线,第一卫星天线和第二卫星天线不在同一空间直线上,从而测量求得动臂2的空间位置姿态,具体第一卫星天线和第二卫星天线均采用gnss卫星接收天线,接收主机采用定位定向gnss接收机接收基站信号实时rtk测量。
[0052]
具体地,在s2中,测量模块包括分别用于测量斗杆液压油缸14和/或铲斗液压油缸15的伸缩长度,根据液压油缸的伸缩长度以及动臂2的位姿信息得到斗杆3和铲斗4的位姿信息。测量组件包括位移传感器、测量绳、回卷装置以及套管,回卷装置可安装在挖掘机的车体、动臂或斗杆上,具体在本实施例中,回卷装置安装在动臂2上,测量绳的一端与液压油缸的活动端连接,另一端与回卷装置连接,位移传感器设在回卷装置侧,用于测量测量绳伸出长度的,套管套设在测量绳上,套管的一端与液压油缸的输出端连接。具体在本实施例中,可采用拉绳位移传感器替代位移传感器、测量绳以及回卷装置,同样能起到相同的效果。在实际测量过程中,测量斗杆液压油缸14和/或铲斗液压油缸15的伸缩长度并不一定需要都采用测量组件进行测量,亦可择一采用测量组件进行测量,另一采用现有技术中的测量方式进行测量,其均能够实现相应的功能。
[0053]
测量模块在测量的时候,以设置在动臂2上的测量组件为例,当斗杆液压油缸14伸缩时,由于第一套管10的一端固定在斗杆液压油缸14的输出端,第一测量绳12的一端固定在斗杆液压油缸14的活动端,根据第一测量绳12在第一套管10内的长度等于第一套管10长度的原理,结合位移传感器,可测量计算出第一测量绳12与第一套管10之间的长度差,并根据该长度差与斗杆液压油缸14的伸缩长度的固有关系推断出斗杆液压油缸14的伸缩长度。
[0054]
由于套管的一端与液压油缸的输出端固定,测量绳的一端与液压油缸的活动端固定,因此液压油缸的伸缩杆上方的测量绳与伸缩杆必定是平行且长度相等的,设通过位移传感器测得的测量绳伸出长度为l1,套管的长度为l2,套管与拉绳位移传感器的出线口之间的距离为l3,露出在液压油缸上的测量绳的长度为l4,则l4=l1-l2-l3,而套管一端在液压油缸的输出端的位置是固定的,其在液压油缸轴线上的投影点与液压油缸的转轴间的距离是已知固定不变的,因此即可远程算出cd和eh的长度。
[0055]
为了减少测量绳往复运动的阻力,应选用内表光滑阻力小的套管,套管应尽量少弯曲,同时可在套管内加上润滑剂。为使测量准确,要求测量绳和套管的伸缩应变小,应根据测量绳的外径大小适量选择套管的内径大小,套管的内径应比测量绳的外径大,还可在套管的两端设有环状活塞,环状活塞的外径分两段,较小的外径与套管内径相同,以插入套管的端部,较大的外径结构能够防止环状活塞整体进入套管,环状活塞的内径与测量绳的外径相同,同时还可在套管的端部加上防尘套,防止污物进入套管中。为了减少套管的长度,也可增加滑轮代替部分套管或全部套管。
[0056]
由于铲斗4会与施工地直接接触,因此铲斗4的测量绳h端是较易触碰的位置,该套管端的连接端可移至铲斗液压油缸15与斗杆3的转轴e处,然后利用不锈钢圆管18替代部分套管,不锈钢实心杆19替代部分测量绳,从而避免测量绳出现断落等情况。
[0057]
在测量推算斗杆3的位姿信息的时候,根据动臂2的位姿和动臂2与斗杆3之间的转轴b与动臂2的固有空间位置关系,求得转轴b的空间位置,根据动臂2的位姿和bc与动臂2的固有位置关系,求出bc的空间位置;根据测量组件测得的斗杆液压油缸14的伸缩长度,求得斗杆3绕转轴b相对bc方向的旋转角度,再根据转轴b的空间位置、bc的空间位置以及斗杆3
绕转轴b相对bc方向的旋转角度,求得斗杆3的空间位置姿态。
[0058]
在测量铲斗4的位姿信息的时候,根据斗杆3的空间位置姿态和斗杆3与铲斗4之间的转轴g与斗杆3的固有空间位置关系,求得转轴g的空间位置,再根据斗杆3的位姿和gf与斗杆3的固有空间关系,求出gf的空间位置;根据测量组件测得的铲斗液压油缸15的伸缩长度,求得铲斗4绕转轴g相对gf方向的旋转角度,再利用转轴g的空间位置、gf的空间位置以及铲斗4绕转轴g相对gf方向的旋转角度,求得铲斗4的空间位置姿态。最后根据斗齿在铲斗4中的固有空间位置关系,推算得斗齿的三维坐标,确定斗齿的路径轨迹。
[0059]
具体地,图1中,设转轴c和转轴d间的距离、转轴b和转轴c间的距离、转轴b和转轴d间的距离为l
cd
、l
bc
、l
bd
,l
bc
、l
bd
是已知固定的,通过测量组件远程测量出l
cd
,在三角形bcd中,根据余弦定理,l
cd2
=l
bc2
+l
bd2
+2
×
l
bc
×
l
bd
×
cos(∠cbd),据此可以解出斗杆3的旋转角∠cbd;
[0060]
设ef、fg、gi、fh、hi、eg、eh、eg、hg的长度为l
ef
、l
fg
、l
gi
、l
fh
、l
hi
、l
eg
、l
eh
、l
eg
、l
hg
,ef、fg、gi、fh、hi、eg的长度l
ef
、l
fg
、l
gi
、l
fh
、l
hi
、l
eg
是已知固定不变的;在三角形efg中,根据余弦定理,l
eg2
=l
ef2
+l
fg2
+2
×
l
ef
×
l
fg
×
cos(∠efg),解方程得∠efg;通过测量组件远程测量出eh长度l
eh
,在三角形efh中,根据余弦定理,l
eh2
=l
ef2
+l
fh2
+2
×
l
ef
×
l
fh
×
cos(∠efh),解方程得∠efh,∠efg=∠efh+∠hfg,因而得到∠hfg=∠efg-∠efh;在三角形hfg中,根据余弦定理,l
hg2
=l
fg2
+l
fh2
+2
×
l
fg
×
l
fh
×
cos(∠hfg),求得l
hg
;在三角形hfg中,根据余弦定理,l
fh2
=l
hg2
+l
fg2
+2
×
l
hg
×
l
fg
×
cos(∠fgh),解方程得∠fgh;在三角形hgi中,根据余弦定理,l
hi2
=l
hg2
+l
gi2
+2
×
l
hg
×
l
gi
×
cos(∠hgi),解方程求得∠hgi,因而求得铲斗4的转角∠fgi=∠fgh+∠hgi。
[0061]
在s3中,在进行数据获取计算时,需先对挖掘机各部件的相互位置关系进行设定,用在同一假定坐标系统用全站仪测出如图1中挖掘机的轴a、b、c、e、f、g、h、i、j、k各轴两端端点的三维坐标,并取左右两侧对称点的平均值,根据三维坐标平均值反算bc、bd、ef、fg、gi、fh、hi、eg的三维长度l
bc
、l
bd
、l
ef
、l
fg
、l
gi
、l
fh
、l
hi
、l
eg
,并测得定位第一卫星天线相位中心的三维坐标;把gnss的rtk实时测量数据、倾斜仪实时测量数据、测量模块的实时数据通过串口输入至测量终端,测量终端具体可以可选用带触摸功能的平板电脑,该电脑上可安装有挖掘机施工引导系统软件;通过软件,设置l
bc
、l
bd
、l
ef
、l
fg
、l
gi
、l
fh
、l
hi
、l
eg
的三维长度,设置gnss接收卫星天线相位中心相对动臂2上b轴c轴的安装位置,根据b、d、f、g各点的三维坐标,设置斗杆3上b轴、d轴、f轴、g轴的位置关系,根据g、i、j、k各点的三维坐标,设置铲斗4上g、i、j、k的位置关系,设置gnss坐标转换参数,使软件上显示的三维坐标与施工坐标高程一致,设置动臂2上的倾斜仪5的纵向倾斜加常数改正,使第一卫星天线的接收机rtk窄距解测出的倾斜与倾斜仪5测出的倾斜相同;设置动臂2上的倾斜仪5的横向加常数改正,使挖掘机的横向倾斜与倾斜仪5测出的横向倾斜相同;设置测量斗杆3的测量组件的位移传感器的加常数,使其显示的测距值等于cd的距离,设置铲斗4的测量组件的位移传感器的加常数,使其显示的测距值等于eh的距离。
[0062]
在s4和s5中,施工地原始地形包括实际地形模型和设计地形模型,设计地形模型为挖掘的目标地形的空间三维数据仿真模型,具体根据设计线路中线的平曲线、竖曲线数据和不同里程的设计断面数据,输入设计地形数据,实际地形模型根据原始地形数据或实测地形数据输入网格实际地形数据,如果施工前实测得到的原始地形数据点平面分布是不
规则的,可通过内插生成规则平面分布的网格点地形数据,也可根据实测地形数据内插生成网格实际地形数据,内插高程可以采用距离倒数加权法或距离平方倒数加权法。建立铲斗4模型后,模拟施工工地地形施工挖掘情况时,根据斗齿的路径轨迹调实际地形模型的高程,得出被挖后的实际地形模型,通过被挖后的实际地形模型与设计地形模型比对,确定实际工地施工情况。具体地,根据挖掘机铲斗4的多个斗齿连线的运动轨迹面,当经过的网格点高程大于该点在轨迹面上的竖直投影点高程时,实时修改网格点高程为方形网格点的平面位置对应的轨迹曲面的高程,从而能够监视目前挖掘机施工情况,以避免出现超挖、欠挖、漏挖、重复挖现象。
[0063]
具体可用网格点表标施工地原始地形三维数据,施工过程中,由于实时调整实际地形模型的高程,经过施工的实际地形模型的网格点高程数值不断变小,每个方形网格中间拉一条对角线,可用两个三角形面表示一个方形网格面,以实现三维效果,设计地形模型的模型同理,施工地地形每个网格面可用对角线分开成两个三角形面来表示,对施工工地地形屏幕可见的所有三维网格面进行材质、贴图、光照三维效果处理进行三维仿真,从而能更形象直观对比显示实际地形和设计地形。
[0064]
在建立铲斗4模型时,如果铲斗4的多个斗齿齿尖在一直线上,可用铲斗4左侧斗齿尖和右侧斗齿尖的连线代替,该连线经过的路径实时,得出被挖地形模型,从而修改施工地地形模型,测量铲斗4的路径轨迹时,前后两个测量时刻该路径可用两个三角形面表示。
[0065]
如图3所示,l1、r1、l2、r2为实测某两个时间点的铲斗4路径轨迹面,其中l1和r1为铲斗4在第一时间点中的左侧斗齿尖和右侧斗齿尖的实际坐标点,l2和r2为铲斗4在第二时间点中的左侧斗齿尖和右侧斗齿尖的实际坐标点。判断施工地地形模型的网格点p的水平投影是否落在顶点是ll、l2、r1组成的三角形的水平投影内的方法,可用面积比较的方法,设p点的三维坐标是(x
p
,y
p
、h
p
),l1点的三维坐标是(x
l1
,y
l1
、h
l1
),l2点的三维坐标是(x
l2
,y
l2
、h
l2
),r1点的三维坐标是(x
r1
,y
r1
、h
r1
),则d12=(x
l1-x
r1
)2+(y
l1-y
r1
)2,求出d1,同理求出d2、d3、d4、d5、d6;设顶点为l1、l2、r1的水平投影三角形的面积为s1,设顶点为p、l1、r1的水平投影三角形的面积为s2,设顶点为p、r1、l2的水平投影三角形的面积为s3,设顶点为p、l2、l1的水平投影三角形的面积为s4,设m1=(d1+d2+d3)/2,根据海伦公式,则s12=m1
×
(m1-d1)
×
(m1-d2)
×
(m1-d3),求出s1,同理求出s2、s3、s4;如果s1<s2+s3+s4,则p点水平投影点不在顶点为l1、l2、r1的水平投影三角形内,如果s1=s2+s3+s4,则p点水平投影在顶点为l1、l2、r1的水平面三角形内,此时p点的坐标修改为p点在顶点为l1、l2、r1的空间三角形所在的空间平面内的竖直投影点的高程,同理判断q点水平投影是否在顶点为r1、r2、l2的水平投影三角形内,以及判断其他网格点是否在这两个三角形水平面内,已知三个三维空间点,设经过顶点是ll、l2、r1组成的空间三角形的空间平面方程为a
×
x+b
×
y+c
×
z+d=0,(a,b,c)为该平面法线方向,可由向量l1-l2和向量l1-r1的向量积算得,根据向量积公式有
[0066]
a=(y
l2-y
l1
)
×
(h
r1-h
l1
)-(h
l2-h
l1
)
×
(y
r1-y
l1
)
[0067]
b=(x
r1-x
l1
)
×
(h
l2-h
l1
)-(x
l2-x
l1
)
×
(h
r1-h
l1
)
[0068]
c=(x
l2-x
l1
)
×
(y
r1-y
l1
)-(x
r1-x
l1
)
×
(y
l2-y
l1
)
[0069]
代入l1点的三维坐标(x
l1
,y
l1
、h
l1
)得
[0070]
d=-(a
×
x
l1
+b
×
y
l1
+c
×
h
l1
)
[0071]
p点在该空间平面上竖直投影点高程h
p投影
=-(a
×
x
p
+b
×
y
p
+d)/c,如果h
p投影
<h
p
,施
工后实际地形网格点p的坐标修改为(x
p
,y
p
、h
p投影
),同理,设q点的三维坐标是(x
q
,y
q
、h
q
),q点在r1、r2、l2组成的空间三角形所在的空间平面上竖直投影点高程hq投影,如果h
q投影
<h
q
,施工后实际地形网格点q的坐标修改为(x
q
,y
q
、h
q投影
)。
[0072]
上述实施例只是为了说明本发明的技术构思及特点,其目的是在于让本领域内的普通技术人员能够了解本发明的内容并据以实施,并不能以此限制本发明的保护范围。凡是根据本发明内容的实质所做出的等效的变化或修饰,都应涵盖在本发明的保护范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1