一种水面垃圾自动收集船
1.本发明涉及水面垃圾收集设备技术领域,具体为小型水域自动识别收集领域。
背景技术:
2.随着我国经济的发展,水体污染越来越严重。漂浮于水面的垃圾是常见的一种水体表面的污染,水体表面的生活废弃物严重破坏河道或湖泊的生态平衡。及时清除水面垃圾,传统的方式采用人工打捞进行水面垃圾的清除。这一传统方式,存在打捞成本高昂,效率低,受天气影响较大等不足。
3.目前自动打捞船对漂浮废物可自动打捞,就是在船只航行的过程中依托水流将打捞水面垃圾送入船舱内,可实现高效清理垃圾。但是为了保证清洁效率这些船设计的都很大,适用于大中型水域环境,无法应用于小型水域环境,桥下人视线受阻,无法分辨垃圾,使用不方便等缺陷。因此,研发一种可以在水域内进行水面垃圾自动识别、压缩、收集的清洁船技术方案意义重大。
技术实现要素:
4.本水面垃圾搜集装置的是为了展示一种新型的水面垃圾处理方式,解决现有水面垃圾处理方式的局限性问题和功能缺陷。
5.为实现上述的一种水面垃圾自动收集装置目的,本发明是采用如下的技术方案:包括船体主体,所述船体主体呈u型, 所述船体尾部末端对称设置有第一电机和第二电机,所述船体侧壁设置有安装销,所述船体上方是图像传感器。所述船体内部设置有控制室。所述控制室由gps模块、主控处理器、电源组成。所述船体开口设有压缩装置,由电动液压推杆和压缩推头组成。所述传送带位于压缩装置后方。所述刀片组位于传送带上方。所述垃圾收集容器位于传送带后方。
6.进一步的,上述u型船体,在材质上选取了聚四氟乙烯,这种材料具有抗酸抗碱,对不同的水质有良好的适应性,有着更长的生命周期。
7.进一步的,上述船体内部设置有控制室。控制室由gps模块、主控处理器、电源、第三电机与第四电机五个部分组成。
8.进一步的,上述gps能实时连续监控目标,持有者还能实时通过gsp模块和电控装置查看垃圾收集器的工作状态,调整垃圾收集器的工作位置。
9.进一步的,上述主控处理器为自动化变速控制系统,由接收到图像处理器发出的信号到确定垃圾的位置,再到控制发动机,已达到自动前往垃圾所在的位置的效果。
10.进一步的,上述电源考虑到防止实际应用中可能会出现的安全情况,电压不超过24v,为了确保能工作3小时,采用了8000mah的电池容量。
11.进一步的,上述图像传感器,本装置应用了图像传感器,在水面垃圾的搜索和判断中,能够更加精准的识别垃圾,防止误判垃圾的情况出现。安装在控制室中间的顶端,固定在船体上,能够进行360度的旋转。
12.进一步的,在垃圾搜集装置上安装了6个超声波传感器,三个个一组船体前的左右两边,可以配合摄像头来测量垃圾搜集装置与周围存在垃圾的距离。
13.进一步的,上述主控处理器,安装在垃圾搜集装置的船体的内部,功能主要是结合搜集到的各个数据,决定垃圾搜集装置的前进路线,或模式的调整与执行。
14.进一步的,上述电机通过转轴连接着螺旋桨,由主控处理器根据图像以及传感器综合做出判断后,控制电阻器来调节运行速度,根据不同场景,做出合适的动态变化。
15.进一步的,上述两个小型二叶螺旋桨采用耐腐蚀合金,对称安装于船体尾,由两个电机分别带动。
16.进一步的,上述螺旋桨末端在第一电机和第二电机的驱动下,速度随电机转动速率变化,以实现转弯。
17.进一步的,上述传送带装置,分为前后两截,采用不锈钢材料,表面打孔,安装在u型船体中间,前段水平,后段与水平面呈40度倾斜角,速度控制在2m/s。传送带两边高,中间低,防止垃圾从两侧掉出,传送带下端连接着垃圾压缩装置,上端连接着垃圾搜集的容器。
18.进一步的,上述垃圾压缩装置,位于传送带入口处。组成为有两个液压推杆带动两侧压缩推头,向中靠拢进行压缩,液压推杆采用电动液压推杆,由第三电机与第四电机带动,液压推杆一头连接压缩推头,一头通过滚珠丝杠与电源控制的电机相连,压缩推头采用耐腐蚀耐磨损的不锈钢板焊接而成。此外,压缩推头中间留有缝隙,以布置刀片组。
19.进一步的,上述刀片组总计有两组扇叶型刀片,位于对称分布在压缩装置的缝隙之中,刀片为三叶刀片,连接着电机,在装置启动后由两个电机分别带动。
20.进一步的,上述垃圾收集容器为金属过滤网制成的类似箱子,采用统一规格的,长方体结构,利用特制弯钩可拆卸垃圾收集容器,两边下边都焊接有外框支架,压力传感器利用外框支架固定在船体上,垃圾收集容器紧压传感器,可实时测量压力大小。上方不封闭,垃圾可经过传送带直接进入。
21.进一步的,上述太阳能电池板的正极通过太阳能电源控制器连接电源的正极, 太阳能电池板的负极通过太阳能电源控制器连接电源的负极。
22.进一步的,本发明以水面垃圾搜集为目的,采用的技术方案上:融入了视觉传输的技术,自动识别技术,实现了全自动化的垃圾处理,节省了人力成本的同时,操作也更为简单方便。另一方面本垃圾搜集装置为双电机驱动,由电机通过转动轴带动螺旋桨,稳定性强,清理垃圾更为高效。
附图说明
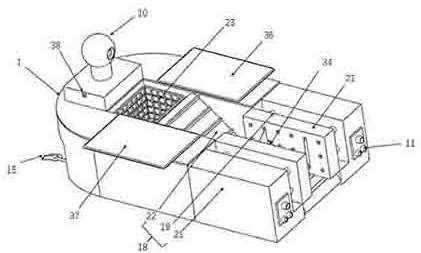
23.图1为本发明立体结构图。
24.图2为本装置纵向切面图。
25.图3为螺旋桨与船体连接部分图。
26.图4为滚动珠丝杆切面图。
27.图5为船体俯视图。
具体实施方式
28.下面与具体的实施例相结合,对本发明的垃圾搜集装置在技术方案上展开清晰、
完整地介绍。此外,申请人声明,虽然专利说明书对发明的实施方案进行了说明,但说明书的说明方式只是为了让本垃圾搜集装置更加清晰明了的呈现。所述的实施例仅仅只是一部分实施例,而非本发明的全部实施例。在本发明中的实施例的基础之上,其他人员依靠如下实施方式所实现的功能或者在结构方面的等效变换或类似替代,均在本发明的专利保护范围之中,所附权利要求应与等同物限定。
29.请参阅图1,一种水面垃圾自动收集装置,包括u形船体1,u形船体1侧壁设置有安装销2,以及第一太阳能板36和第二太阳能板37,u形船体1一端设置有控制室3,控制室3上方有图像传感器1,以及充电插孔38,控制室3内部有gps模块4、主控处理器12、电源13、驱动电机20。参考图3,u形船体1尾部末端对称设置有第一电机8和第二电机9,第一电机分别通过转轴16与二叶螺旋桨14相连,驱动二叶螺旋桨14转动,第二电机9通过转轴17与二叶螺旋桨15相连。参考图2,驱动二叶螺旋桨15转动,第三电机6和第四电机26位于船体内部两侧,分别通过滚珠丝杠27连接着第一电动液压推杆19和第二电动液压推杆20,两个电动液压推杆连接左右两个压缩推头21,船体中部传送带22与电源13相连,压缩推头的中间有刀片组7,刀片组7通过转轴17连接到电机34,35,垃圾收集容器23位于传送带22结束位置两边挂着u型船体1之上,垃圾收集容器23一边下方有压力传感器24。
30.综上,参考图5,u形船体1为倒u型结构,既减少了船体在水上收集垃圾的阻力,又使被收集的垃圾不会溢出。u形船体1内部两侧有浮体19,使船体可以浮于水面上。gps模块4、主控处理器12、电源13、驱动电机20通过螺栓固定安装在控制室3内部,主控室内部设备通过导线与内部电源电性连接,通过主控处理器12对所有电力部件进行自动控制,主控处理器12驱动第一电机8和第二电机9 的转速,控制u形船体1前进的速度。第一电机8和第二电机9通过转轴控制船尾的二叶螺旋桨14,二叶螺旋桨14与转轴键联接,螺旋桨14在第一电机8和第二电机9驱动下,水平方向摆动10-30度,实现u形船体1的转向,第一电动液压推杆19和第二电动液压推杆20在第三电机6和第四电机26的驱动下,推进压缩推头21,在电机(34)(35)的带动下,刀片组7开始运转,传送带22在连通电源13后,实现将垃圾切割传输到垃圾储存容器23。主控处理器12控制四个驱动电机实现对垃圾收集装置的控制,主控处理器12获取压力传感器24数据,做出是否满载的判断与进一步处理。
31.上述使用电力作为驱动的基于图像识别的新型水面垃圾搜集装置主要包括如下步骤方法。
32.步骤1:通过gps模块4,超声波传感器11,获取船体的位置信息,船体到水面上的各个物体的距离信息。并将这些信息传递给主控处理器12,在处理器内部生成一张二维的地图模型,对本装置附近水面是否能活动的范围做出划分。
33.步骤2:通过图像传感器10捕获到各个疑似垃圾物体的图像信息:把光聚焦到传感器上,将光信号转换成电信号,将图像信息传递给主控处理器12进行分析。
34.步骤3:主控处理器12接受到图像信息,根据预置的图像识别算法程序,对图像中的各物体检索并判断图像之中是否存在垃圾,及垃圾的个数。
35.步骤4:主控处理器12确认垃圾,并根据之前获取的距离信息与所在位置信息做出路径的规划,并运用算法将所做出的路径规划转化为各驱动电机8的转动的速度值大小和时间值长短。
36.步骤5:主控处理器12调节主电路中电阻大小来改变电源13与驱动电机8之间的电
流大小用以控制电机的实时转速,并控制转速维持在正常范围内。
37.步骤6:第一电机8和第二电机9通过转轴带动两侧的第一二叶螺旋桨14和第二二叶螺旋桨15,通过不同的电机转速来控制船体的前进方向以及前进速度。当电机停止转动时,第一二叶螺旋桨14和第二二叶螺旋桨15也减速到静止状态。
38.步骤7-1:垃圾进入压缩装置,第三电机6和第四电机26分别带动第一液压推杆19和第二液压推杆20,2个压缩推头21受到第一液压推杆19和第二液压推杆20挤压,向中推动挤压垃圾,将垃圾压缩。
39.步骤7-2:压缩垃圾同时进入刀片组7,刀片组7在第五电机34以及第六电机35带动下高速转动逆时针转动,将垃圾切割成更小的部分。最后运送到储存容器23。
40.步骤8:垃圾压力传感器24,将重量数据传输给主控处理器12,主控处理器12做出是否超重的判断,是否继续进行垃圾搜集,或提醒更换储存容器23。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1