用于多用途车辆上的作业工具的控制系统和方法与流程
本发明总体上涉及一种多用途车辆。本发明的实施方式涉及一种用于多用途车辆上的作业工具的控制系统。
背景技术:
1、多用途车辆(诸如,自动平地机、滑动式和履带式装载机、以及履带式推土机)通常使用作业工具沿着表面移动物质。控制作业工具朝向表面上的压力量以移动期望量物质是困难的并且需要频繁调整。用于控制作业工具在作业表面上的压力的改进系统将有助于减少操作者疲劳并且还减少对多用途车辆的部件的不必要和/或过早磨损。
技术实现思路
1、本公开的示例的各个方面在权利要求中阐述。
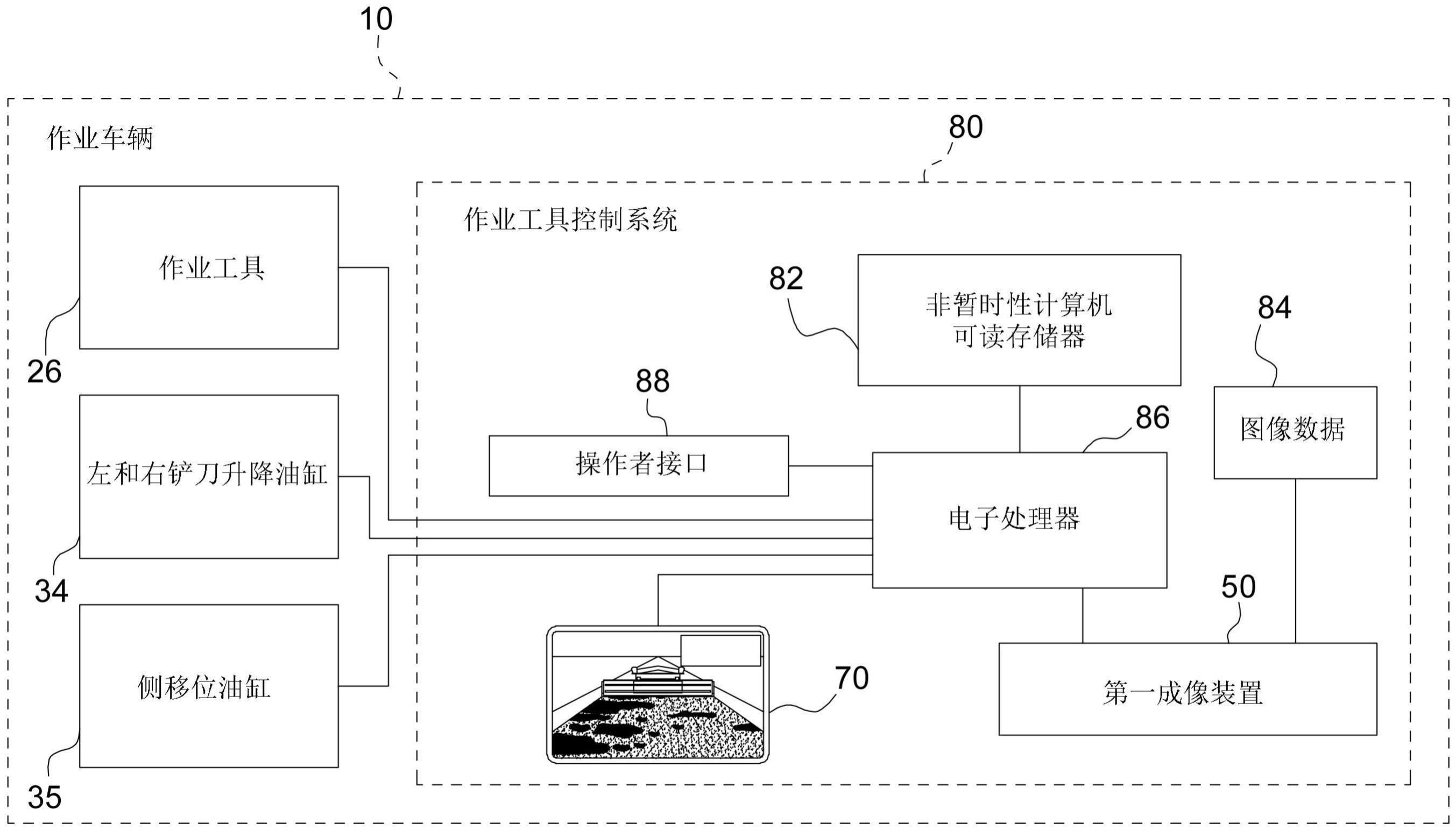
2、根据本公开的第一方面,一种用于控制多用途车辆的作业工具的系统,所述系统包括所述作业工具、与所述作业工具联接的一个或更多个移动机构、成像装置、存储操作信息的非暂时性计算机可读存储器、以及电子处理器,所述电子处理器被配置为在多用途车辆移动期间将所述作业工具应用到表面,其中,所述作业工具在第一位置朝向所述表面施加第一压力,通过所述第一成像装置捕获靠近所述作业工具的表面的第一图像,通过所述电子处理器评估所述第一图像以确定所述表面的受所述作业工具影响的区域,并且基于对所述第一图像的评估,通过所述一个或更多个移动机构将所述作业工具调整到第二位置以朝向所述表面施加第二压力。
3、根据本公开的第二方面,一种调整应用到表面上的作业工具的压力的方法,所述方法包括:在多用途车辆移动期间将所述作业工具应用到所述表面,其中,所述作业工具在第一位置朝向所述表面施加第一压力;通过成像装置捕获靠近所述作业工具的所述表面的第一图像;通过电子处理器评估所述第一图像以确定所述表面的受所述作业工具影响的区域;并且基于对所述第一图像的评估,通过一个或更多个移动机构将所述作业工具调整到第二位置以朝向所述表面施加第二压力。
4、根据本公开的第三方面,作业车辆包括作业工具、与所述作业工具联接的一个或更多个移动机构、成像装置、存储操作信息的非暂时性计算机可读存储器、以及电子处理器,所述电子处理器被配置为在所述多用途车辆移动期间将所述作业工具应用到表面,其中,所述作业工具在第一位置朝向所述表面施加第一压力,通过所述第一成像装置捕获靠近所述作业工具的所述表面的第一图像,通过所述电子处理器评估所述第一图像以确定所述表面的受所述作业工具影响的区域,并且通过所述一个或更多个移动机构,基于对所述第一图像的评估,将所述作业工具调整到第二位置以朝向所述表面施加第二压力。
5、根据以下描述和附图,上述和其它特征将变得显而易见。
技术特征:
1.一种用于控制用于多用途车辆的作业工具的系统,所述系统包括:
2.根据权利要求1所述的系统,其中,所述作业工具包括犁板、铲刀、铲斗、刮刀、犁、中耕机或圆盘耙。
3.根据权利要求1所述的系统,其中,所述第一成像装置包括相机。
4.根据权利要求1所述的系统,其中,所述电子处理器还被配置为基于所述表面的宽度来调整所述作业工具的位置。
5.根据权利要求1所述的系统,其中,对所述第一图像的评估包括:通过所述电子处理器将所述第一图像的较亮部分与所述第一图像的较暗部分进行比较,或者将所述第一图像的第一部分和所述第一图像的第二部分的表面纹理或表面反射或评估进行比较。
6.一种调整应用到表面上的作业工具的压力的方法,所述方法包括:
7.根据权利要求6所述的方法,其中,所述第二位置基于由所述作业工具朝向所述表面施加的较高压力将所述作业工具放置得更接近所述表面,或者基于由所述作业工具朝向所述表面施加的较低压力将所述作业工具放置得离所述表面较远。
8.根据权利要求6所述的方法,其中,所述一个或更多个移动机构包括液压缸、蜗轮以及齿条和齿轮轴中的一者或更多者。
9.根据权利要求6所述的方法,所述方法还包括在显示器上显示靠近所述作业工具的所述表面的所述第一图像。
10.一种作业车辆,所述作业车辆包括:
11.根据权利要求10所述的作业车辆,其中,所述作业工具包括犁板、铲刀、铲斗、刮刀、犁、中耕机或圆盘耙。
12.根据权利要求10所述的作业车辆,其中,所述第一成像装置包括相机。
13.根据权利要求10所述的作业车辆,其中,所述电子处理器还被配置为基于所述表面的宽度来调整所述作业工具的位置。
14.根据权利要求10所述的作业车辆,其中,对所述第一图像的评估包括:通过所述电子处理器将所述第一图像的较亮部分与所述第一图像的较暗部分进行比较。
15.根据权利要求10所述的作业车辆,其中,对所述第一图像的评估包括:通过所述电子处理器将所述第一图像的第一部分和所述第一图像的第二部分的表面纹理或表面反射或评估进行比较。
技术总结
本公开提供了用于多用途车辆上的作业工具的控制系统和方法。根据示例性实施方式,一种用于控制多用途车辆的作业工具的系统,所述系统包括作业工具、与所述作业工具联接的一个或更多个移动机构、成像装置和控制器,其中,所述控制器被配置成在多用途车辆移动期间将所述作业工具应用到表面,其中,所述作业工具在所述第一位置朝向所述表面施加第一捕获压力,通过所述第一成像装置捕获所述作业工具附近的所述表面的第一图像,通过处理器评估所述第一图像以确定所述表面的受所述作业工具影响的区域,并且基于对所述第一图像的评估,通过所述一个或更多个移动机构将所述作业工具调整到第二位置以朝向所述表面施加第二压力。
技术研发人员:C·克里斯托弗森,A·H·夸特科夫斯基,M·L·莱姆克
受保护的技术使用者:迪尔公司
技术研发日:
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!