一种土木工程移动在线监测仪
1.本发明涉及工程测量技术领域,更具体地说,它涉及一种土木工程移动在线监测仪。
背景技术:
2.在土木工程中,为保障已建、在建、将建的建筑工程安全,在建设全过程中对与建筑物有关的地基、建筑材料、施工工艺、建筑结构进行监测的是一项很重要工作。
3.任何一个工程结构都要承受自身重量,以及承受使用荷载和风力的作用。而承重墙体的垂直度以及地面的水平度是影响建筑质量重要因素之一。但在现有工程测量的技术中,对建筑工程结构进行质量监测时,通畅采用人工手动检测,例如需要对地面平整度进行检测时,就需要人员手持水平仪到现场的每一处进行检测;并且对墙体的垂直度进行检测时,就需要人员手持垂线或者水平仪到每一处墙体进行检测;同时现有技术中,对刚涂抹完泥浆或灰层之后的墙体,则不能采用上述装置,因为当垂线以及水平仪与墙体贴靠后,会与泥浆或灰层粘连,对墙体表面造成破坏。
4.因此,本发明旨在提供一种土木工程移动在线监测仪,以解决上述提到的相关问题。
技术实现要素:
5.本发明的目的是提供一种土木工程移动在线监测仪,以解决上述提到的传统对地面水平度以及墙面垂直度检测费时费力、以及传统器械对墙面造成破坏的问题。
6.本发明的上述技术目的是通过以下技术方案得以实现的:一种土木工程移动在线监测仪,包括箱体、水平检测装置以及垂直度检测装置,所述水平检测装置以及垂直度检测装置分别设于箱体的内侧底部,所述箱体的底部外侧设有移动部件,所述箱体的顶部外侧设有定位装置,所述箱体的内侧壁设有控制处理系统以及供电装置。
7.通过采用上述技术方案,通过箱体,便于固定水平检测装置以及垂直度检测装置提供水平检测装置,从而达到同时对建筑进行多方位检测的目的,便于对地面水平度进行检测;通过垂直度检测装置,便于对建筑墙体的垂直度进行检测;通过移动部件,便于在控制处理系统的控制下带动箱体移动,从而达到自动移动的目的;通过定位装置,便于对箱体达到精准定位的目的,从而传输信号至控制处理系统控制移动部件带动箱体在一条直线上进行移动。
8.本发明进一步设置为:所述水平检测装置包括具有空腔的圆盘以及若干个透明管,所述圆盘设于箱体的内侧底部,若干个所述透明管的一端均垂直设于圆盘的顶部,若干个所述透明管分别与所述圆盘的空腔贯通连接,所述圆盘以及透明管内设有检测液,若干个所述透明管内均设有液位传感器。
9.通过采用上述技术方案,通过圆盘,便于连通若干个透明管,从而使检测液在若干个透明管之间相互流通移动,通过透明管,便于体现由于地面倾斜导致箱体倾斜的角度,从
而检测出地面是否平整的目的;通过液位传感器,便于监测各个透明管内的水位变化,从而能够与水平时的水位值进行比较。
10.本发明进一步设置为:所述垂直度检测装置包括电动伸缩杆一以及激光测距传感器一,所述电动伸缩杆一的一端垂直设于箱体的内侧底部,所述电动伸缩杆一的另一端侧壁与激光测距传感器一的一端固定连接,所述箱体的顶部设有开口,所述开口处设有盖板,所述开口的中心点与垂直度检测装置的中心点平齐。
11.通过采用上述技术方案,通过电动伸缩杆一,便于带动激光测距传感器一上升以及下降移动;通过激光测距传感器一,便于在电动伸缩杆一的带动下测得箱体距离墙面每个高度的距离,从而根据距离的改变判断墙体的垂直度;通过开口,便于电动伸缩杆一带动激光测距传感器一从箱体内伸出。
12.本发明进一步设置为:所述移动部件采用带有驱动电机的万向轮。
13.通过采用上述技术方案,通过采用驱动电机的万向轮,便于带动箱体在任意方位平移。
14.本发明进一步设置为:所述定位装置包括壳体以及若干个激光测距传感器二,所述壳体设于箱体的顶部,所述壳体的侧壁垂直间隔设有若干个通孔,若干个所述激光测距传感器二的一端设于壳体的内侧,若干个所述激光测距传感器二的输出端分别贯穿若干个所述通孔设于壳体外侧。
15.通过采用上述技术方案,通过激光测距传感器二,便于测得箱体与建筑四周之间的距离,从而达到对箱体在建筑内的定位。
16.综上所述,本发明具有以下有益效果:
17.1.在本发明中,通过定位装置中若干个激光测距传感器二对四周的墙体进行测距,从而能够体现出箱体处于建筑的某一精确位置,以及能够通过控制处理系统控制移动部件平行于墙体移动,从而达到对建筑墙体垂直度以及地面水平度进行自动化监测的目的。
18.2.在本发明中,通过电动伸缩杆一匀速带动激光测距传感器一从箱体内伸出,然后控制处理系统间隔一定时间收集箱体距离到墙体的距离,从而根据连续若干个距离的差值体现出墙体的垂直度,从而达到对墙体的垂直度进行自动化检测的目的。
19.3.在本发明中,通过圆盘与若干个透明管连通,以及检测液在圆盘与若干个透明管之间流动,控制处理系统通过液位传感器监测各个透明管内的液位变化,然后通过各个透明管内的液位差从而体现出地面的水平度,从而达到对地面水平度进行自动化检测的目的。
20.4.在本发明中,通过激光测距传感器二对墙体的间断测距,从而解决了传统器械需要与墙体贴靠进行检测,对墙体造成不必要破坏的问题。
21.5.在本发明中,通过控制处理系统的控制以及定位装置的定位,从而在不需要工作人员监管的情况下,实现移动部件带动箱体在建筑内行驶移动,并对墙体的垂直度以及地面的倾斜度进行自动化监测的目的,以及能够对监测数据实时记录分析。
附图说明
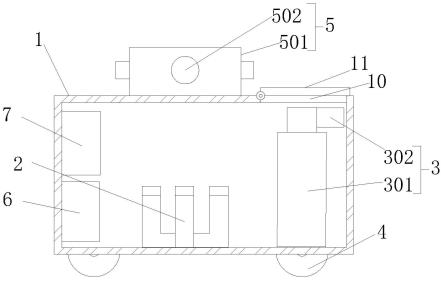
22.图1是本发明实施例中一种土木工程移动在线监测仪的剖视结构图;
23.图2是本发明实施例中一种土木工程移动在线监测仪的俯视图;
24.图3是本发明实施例中一种土木工程移动在线监测仪中水平检测装置的剖视图。
25.图中:1、箱体;2、水平检测装置;3、垂直度检测装置;4、移动部件;5、定位装置;6、控制处理系统;7、供电装置;8、检测液;9、液位传感器;10、开口;11、盖板;12、通孔;201、圆盘;202、透明管;301、电动伸缩杆一;302、激光测距传感器一;501、壳体;502、激光测距传感器二。
具体实施方式
26.以下结合附图1-3对本发明作进一步详细说明。
27.实施例:一种土木工程移动在线监测仪,如图1至图3所示,包括箱体1、水平检测装置2以及垂直度检测装置3,箱体1采用矩形结构,水平检测装置2以及垂直度检测装置3分别固定安装于箱体1的内侧底部,箱体1的底部外侧固定安装有移动部件4,箱体1的顶部外侧固定安装有定位装置5,箱体1的内侧壁固定安装有控制处理系统6以及供电装置7,控制处理系统6包括stm32单片机、无线通信模块以及导航信息处理模块,供电装置7采用蓄电池。
28.在本实施例中,通过箱体1,便于固定水平检测装置2以及垂直度检测装置3提供水平检测装置2,从而达到同时对建筑进行多方位检测的目的,便于对地面水平度进行检测;通过垂直度检测装置3,便于对建筑墙体的垂直度进行检测;通过移动部件4,便于在控制处理系统6的控制下带动箱体1移动,从而达到自动移动的目的;通过定位装置5,便于对箱体1达到精准定位的目的,从而传输信号至控制处理系统6控制移动部件4带动箱体1在一条直线上进行移动;通过无线通信模块,便于将实时监测数据传输至工作人员的移动端,从而便于工作人员及时查看墙体信息,以及发出控制指令;通过导航信息处理模块,便于在使用前工作人员将建筑结构图输入到控制处理系统6中,然后结合定位装置5对移动装置进行导航移动。
29.水平检测装置2包括具有空腔的圆盘201以及4个透明管202,圆盘201固定安装于箱体1的内侧底部,4个透明管202的一端均垂直固定安装于圆盘201的顶部,4个透明管202分别与圆盘201的空腔贯通连接,圆盘201以及透明管202内放置有检测液8,4个透明管202内均放置有液位传感器9。
30.在本实施例中,通过圆盘201,便于连通若干个透明管202,从而使检测液8在若干个透明管202之间相互流通移动,通过透明管202,便于体现由于地面倾斜导致箱体1倾斜的角度,从而检测出地面是否平整的目的;通过液位传感器9,便于监测各个透明管202内的水位变化,从而能够与水平时的水位值进行比较。
31.垂直度检测装置3包括电动伸缩杆一301以及激光测距传感器一302,电动伸缩杆一301的一端垂直固定安装于箱体1的内侧底部,电动伸缩杆一301的另一端侧壁与激光测距传感器一302的一端固定连接,箱体1的顶部开凿有开口10,开口10处铰接有盖板11,铰接件采用弹性铰接件,开口10的中心点与垂直度检测装置3的中心点平齐,垂直度检测装置3设于开口10的正下方。
32.在本实施例中,通过电动伸缩杆一301,便于带动激光测距传感器一302上升以及下降移动;通过激光测距传感器一302,便于在电动伸缩杆一301的带动下测得箱体1距离墙面每个高度的距离,从而根据距离的改变判断墙体的垂直度;通过开口10,便于电动伸缩杆
一301带动激光测距传感器一302从箱体1内伸出。
33.移动部件4采用带有驱动电机的万向轮,万向轮采用麦克纳姆轮结构,移动部件4的行驶路线采用s形路线,减少无效路径。
34.在本实施例中,通过采用驱动电机的万向轮,便于带动箱体1在任意方位平移。
35.定位装置5包括壳体501以及4个激光测距传感器二502,壳体501固定安装于箱体1的顶部,壳体501的侧壁垂直间隔设有4个通孔12,4个通孔12分别垂直箱体1的4个侧壁进行开设,4个激光测距传感器二502的一端设于壳体501的内侧,4个激光测距传感器二502的输出端分别贯穿4个通孔12设于壳体501外侧,4个激光测距传感器二502发射的激光分别垂直于箱体1的4个侧壁且与地面平行。
36.在本实施例中,通过激光测距传感器二502,便于测得箱体1与建筑四周之间的距离,从而达到对箱体1在建筑内的定位。
37.工作原理:在使用前,工作人员先将建筑结构图传输至控制处理系统6,然后放置监测仪进行现场进行监测。
38.顶部的定位装置5打开,将对所处的位置进行定位且同步显示到工作人员的移动端;然后控制处理系统6通过激光测距传感器二502测得的箱体1前后左右的距离,从而控制移动部件4平行于待测墙体移动,每移动2m将停止移动5s,同时电动伸缩杆一301带动激光测距传感器一302按照1m/s的速度匀速上升,上升高度为1.2m,并控制处理系统6每隔0.1s记录距离数据,从而12个测距点形成一条直线,通过测得距离形成的直线与初始定位距离形成的直线进行比较,从而得出墙体的垂直度;同时在行驶的过程中,通过水平检测装置2的4个透明管202内的液位传感器9分别检测透明管202内变化,从而与初始水平高度进行比较,从而测得地面的水平度。
39.同时监测的数据将实时反馈至工作人员的移动端,且记录在建筑结构图中,便于后期的下载查看。
40.本具体实施例仅仅是对本发明的解释,其并不是对本发明的限制,本领域技术人员在阅读完本说明书后可以根据需要对本实施例做出没有创造性贡献的修改,但只要在本发明的权利要求范围内都受到专利法的保护。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1