可远程操控的挖掘机的制作方法
1.本技术涉及挖掘机的技术领域,尤其是涉及可远程操控的挖掘机。
背景技术:
2.挖掘机,又称挖掘机械,又称挖土机,是用铲斗挖掘高于或低于承机面的物料,并装入运输车辆或卸至堆料场的土方机械;
3.现有技术中可远程操控的挖掘机,远程控制终端为手机、平板电脑或计算机,图像采集模块包括五个红外摄像头,以及中央处理器、环境数据处理模块、无线接收模块、无线发射模块、显示屏、报警器、远程启动模块和操控单元,远程操控时,控制远程启动模块启动,进入远程操控模式,操作者远离挖掘机即可通过远程控制终端对挖掘机进行操控;
4.但是在实际使用的过程中,由于挖掘机上铲斗的尺寸大小固定,导致在挖掘过程中存放较多的不便,在需要更换不同尺寸的铲斗时,就需要更换不同的挖掘机,操作较为麻烦,增加了挖掘成本,因此有待改进。
技术实现要素:
5.为了解决上述背景技术中提出的问题,本技术提供可远程操控的挖掘机。
6.本技术提供的可远程操控的挖掘机采用如下的技术方案:
7.可远程操控的挖掘机,包括挖掘机本体、动臂、斗柄以及铲斗,所述动臂安装在挖掘机本体上,所述斗柄连接在动臂的一端,所述铲斗设置在斗柄的底端处,所述铲斗的两侧处均设置有侧斗,所述铲斗中开设有收纳槽,所述侧斗插进收纳槽中,所述铲斗侧沿的中间处穿过与破碎杆,所述破碎杆的一端呈尖端状,所述破碎杆为螺旋杆,所述破碎杆可转动。
8.通过采用上述技术方案,在挖掘时,可根据时实际情况的需要,在铲斗的两侧移动侧斗,来调节铲斗以及侧斗的整体尺寸大小,使用更加的方便,降低了挖掘成本,并且利用铲斗上破碎杆的转动,可在挖掘的过程中,来破碎坚硬的大石块,提高挖掘效率。
9.优选的,所述铲斗上穿过有两侧螺纹方向相反的螺纹杆,所述螺纹杆穿过侧斗上开设的螺纹孔,所述螺纹杆的两端处均套有转帽。
10.通过采用上述技术方案,利用转帽在铲斗上转动螺纹杆时,两个侧斗同步的在铲斗的两侧朝相反的方向移动,进而调节铲斗以及侧斗的整体尺寸大小,操作更加的简单、方便。
11.优选的,所述螺纹杆的中间处套有第一限位套,所述铲斗的内壁上开设有第一凹槽,所述第一限位套设置在第一凹槽中。
12.通过采用上述技术方案,利用第一限位套在铲斗上对螺纹杆起到限位的作用,使得螺纹杆可转动的同时,避免螺纹杆在铲斗上发生移动的问题。
13.优选的,所述破碎杆处于铲斗内的部分上套有第二限位套,所述铲斗的内壁上开设有第二凹槽,所述第二限位套设置在第二凹槽中。
14.通过采用上述技术方案,第二限位套对破碎杆起到限位的作用,使得破碎杆在转
动破碎的过程中,避免破碎杆发生移动,使得破碎杆对大石块的破碎效果更好。
15.优选的,所述铲斗的外侧壁处设置有转杆,所述转杆的底端套有第二锥齿轮,所述破碎杆的一端套有第一锥齿轮,所述第一锥齿轮与第二锥齿轮之间啮合连接。
16.通过采用上述技术方案,转杆在转动时,透过第二锥齿轮以及第一锥齿轮,来带动破碎杆转动,进行破碎工作。
17.优选的,所述铲斗的外侧壁上安装有保护罩,所述保护罩的上壁上安装有电机,所述电机的输出端与转杆的顶端连接。
18.通过采用上述技术方案,在启动电机时,可自动实现破碎杆的转动破碎工作,并且保护罩在挖掘的过程中,对电机起到保护的作用,延长其使用寿命。
19.综上所述,本技术包括以下有益技术效果:
20.1、本实用新型通过在铲斗的两侧设置有侧斗,侧斗插进开设在铲斗内的收纳槽中,在挖掘时,利用侧斗在铲斗上的移动,可根据实际情况的需要,对侧斗以及铲斗的整体尺寸大小进行调节,使用更加的方便,降低了工作成本;
21.2、铲斗上穿过有两侧螺纹方向相反的螺纹杆,螺纹杆穿过开设在侧斗上的螺纹孔,在利用转帽转动螺纹杆时,两块侧斗可在铲斗的两侧同步的朝相反的方向进行移动,来调节铲斗以及侧斗的整体尺寸大小,操作更加的简单、方便;
22.3、铲斗上穿过有破碎杆,破碎杆一端的第一锥齿轮与转杆上的第二锥齿轮之间啮合连接,转杆的顶端与电机的输出端连接,在启动电机时,可带动破碎杆转动,利用转动的破碎杆来破碎坚硬的大石块,提高挖掘效率,铲斗外壁设置保护电机的保护罩,可在挖掘的过程中,对电机起到保护的作用,延长电机的使用寿命。
附图说明
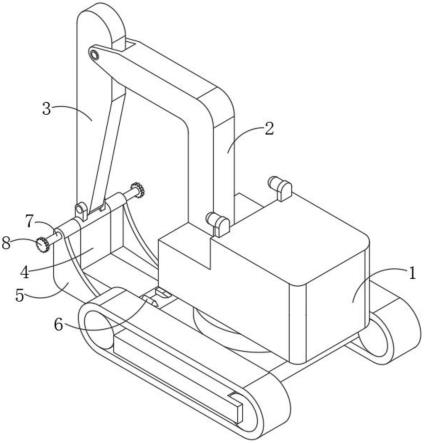
23.图1是本技术实施例中可远程操控的挖掘机的结构示意图;
24.图2是本技术实施例中可远程操控的挖掘机的铲斗正面处结构剖视图;
25.图3是本技术实施例中可远程操控的挖掘机的铲斗侧面处结构剖视图。
26.附图标记说明:1、挖掘机本体;2、动臂;3、斗柄;4、铲斗;5、侧斗;6、破碎杆;7、螺纹杆;8、转帽;9、螺纹孔;10、第一限位套;11、第一凹槽;12、收纳槽;13、第二限位套;14、第二凹槽;15、第一锥齿轮;16、第二锥齿轮;17、转杆;18、电机;19、保护罩。
具体实施方式
27.以下结合附图1-3对本技术作进一步详细说明。
28.本技术实施例公开可远程操控的挖掘机。参照图1-3,可远程操控的挖掘机,包括挖掘机本体1、动臂2、斗柄3以及铲斗4,动臂2安装在挖掘机本体1上,挖掘机本体1的前侧、后侧、左侧、右侧以及铲斗4上均安装有红外摄像头,挖掘机本体1内设置有中央处理器、环境数据处理模块、无线接收模块、无线发射模块、远程启动模块以及操控单元,与外界电脑信号连接,斗柄3连接在动臂2的一端,铲斗4设置在斗柄3的底端处,铲斗4的两侧处均设置有侧斗5,铲斗4中开设有收纳槽12,侧斗5活动的插进收纳槽12中,铲斗4侧沿的中间处穿过与破碎杆6,破碎杆6的一端呈尖端状,破碎杆6为螺旋杆,破碎杆6可转动,在挖掘时,可根据时实际情况的需要,在铲斗4的两侧移动侧斗5,来调节铲斗4以及侧斗5的整体尺寸大小,使
用更加的方便,降低了挖掘成本,并且利用铲斗4上破碎杆6的转动,可在挖掘的过程中,来破碎坚硬的大石块,提高挖掘效率铲斗4上穿过有两侧螺纹方向相反的螺纹杆7,螺纹杆7穿过侧斗5上开设的螺纹孔9,螺纹杆7的两端处均固定的套有转帽8,利用转帽8在铲斗4上转动螺纹杆7时,两个侧斗5同步的在铲斗4的两侧朝相反的方向移动,进而调节铲斗4以及侧斗5的整体尺寸大小,操作更加的简单、方便,螺纹杆7的中间处固定的套有第一限位套10,铲斗4的内壁上开设有第一凹槽11,第一限位套10活动的设置在第一凹槽11中,利用第一限位套10在铲斗4上对螺纹杆7起到限位的作用,使得螺纹杆7可转动的同时,避免螺纹杆7在铲斗4上发生移动的问题。
29.参见图1和3,破碎杆6处于铲斗4内的部分上固定的套有第二限位套13,铲斗4的内壁上开设有第二凹槽14,第二限位套13活动的设置在第二凹槽14中,第二限位套13对破碎杆6起到限位的作用,使得破碎杆6在转动破碎的过程中,避免破碎杆6发生移动,使得破碎杆6对大石块的破碎效果更好,铲斗4的外侧壁处设置有转杆17,转杆17的底端固定的套有第二锥齿轮16,破碎杆6的一端固定的套有第一锥齿轮15,第一锥齿轮15与第二锥齿轮16之间啮合连接,转杆17在转动时,透过第二锥齿轮16以及第一锥齿轮15,来带动破碎杆6转动,进行破碎工作,铲斗4的外侧壁上安装有保护罩19,保护罩19的上壁上安装有电机18,电机18的输出端与转杆17的顶端连接,在启动电机18时,可自动实现破碎杆6的转动破碎工作,并且保护罩19在挖掘的过程中,对电机18起到保护的作用,延长其使用寿命。
30.本技术实施例可远程操控的挖掘机的实施原理为:在使用前,可根据实际情况的需要,利用转帽8来转动螺纹杆7,两个侧斗5唉铲斗4的两侧同步的朝相反的方向进行移动,调节铲斗4以及侧斗5的整体尺寸大小,使用更加的方便,降低了挖掘成本,在挖掘的过程中,当铲斗4碰到坚硬的大石块时,可遥控启动电机18,带动转杆17转动,透过第二锥齿轮16以及第一锥齿轮15,来带动破碎杆6在铲斗4上转动,对大石块进行破碎工作,提高挖掘效率,结构简单、功能实用。
31.以上均为本技术的较佳实施例,并非依此限制本技术的保护范围,故:凡依本技术的结构、形状、原理所做的等效变化,均应涵盖于本技术的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1