一种链刀式地下连续墙设备切削力复合控制方法以及系统与流程
本发明涉及工程机械基坑支护,尤其涉及一种链刀式地下连续墙设备切削力复合控制方法以及系统。
背景技术:
1、随着地下空间开发规模向大、深、紧、复杂多变发展,给深基坑工程支护新技术的应用提供了广阔的舞台。超深等厚水泥土连续搅拌墙工法,简称trd工法,就成为可供选择的基坑支护施工新技术。trd工法是将满足设计深度的附有切割链条以及刀头的切割箱插入地下,在进行纵向切割横向推进成槽的同时,向地基内部注入水泥浆以达到与原状地基的充分混合搅拌在地下形成等厚度连续墙的一种施工工艺,其具有施工深度大、适应地层广、成墙质量好和施工效率高等显著优点,广泛适用于地铁站和地下通道的防护止水墙、堤坝加固工程和江河疏浚工程等。
2、而链刀式地下连续墙设备则是trd工法施工的关键设备。在横向切削和注浆时,设备通过横推油缸推动切削机构(含链刀和刀箱)做横向运动,其中切削工况是设备施工时最关键的步骤。在设备切削工况中,横推油缸推进速度和链刀马达切削力是影响切削效率的主要因素,其中,切削力主要与地质情况、链刀马达转速n、横推油缸推进速度v和横推油缸推进压力p等因素有关,而横推油缸推进速度的大小直接影响成槽效率,理论上横推油缸推进速度越大,切削效率越高,但横推油缸推进速度过大则会导致链刀马达切削力升高,而切削力过大,地下复杂的地质变化会使切削机构被负载卡停,一旦卡停,可能会导致切削机构长时间无法脱困,反而影响切削效率,所以保证设备在合适的切削力范围内以较大的横推油缸推进速度工作是提高切削效率的关键。
3、目前,连续墙设备施工效率较低,主要原因还是无法保证控制切削力在合适范围内的情况下以较大速度推进,所以解决此问题是连续墙设备高效施工的关键所在。
技术实现思路
1、(一)要解决的技术问题
2、鉴于现有技术的上述缺点、不足,本发明提供一种链刀式地下连续墙设备切削力复合控制方法以及系统,其解决了现有技术对切削力的调节手段单一且对调节后的结果未进行进一步检测和控制,无法及时且精确的控制切削力在合适范围内的技术问题。
3、(二)技术方案
4、为了达到上述目的,本发明采用的主要技术方案包括:
5、第一方面,本发明实施例提供一种链刀式地下连续墙设备的切削力复合控制方法,包括:
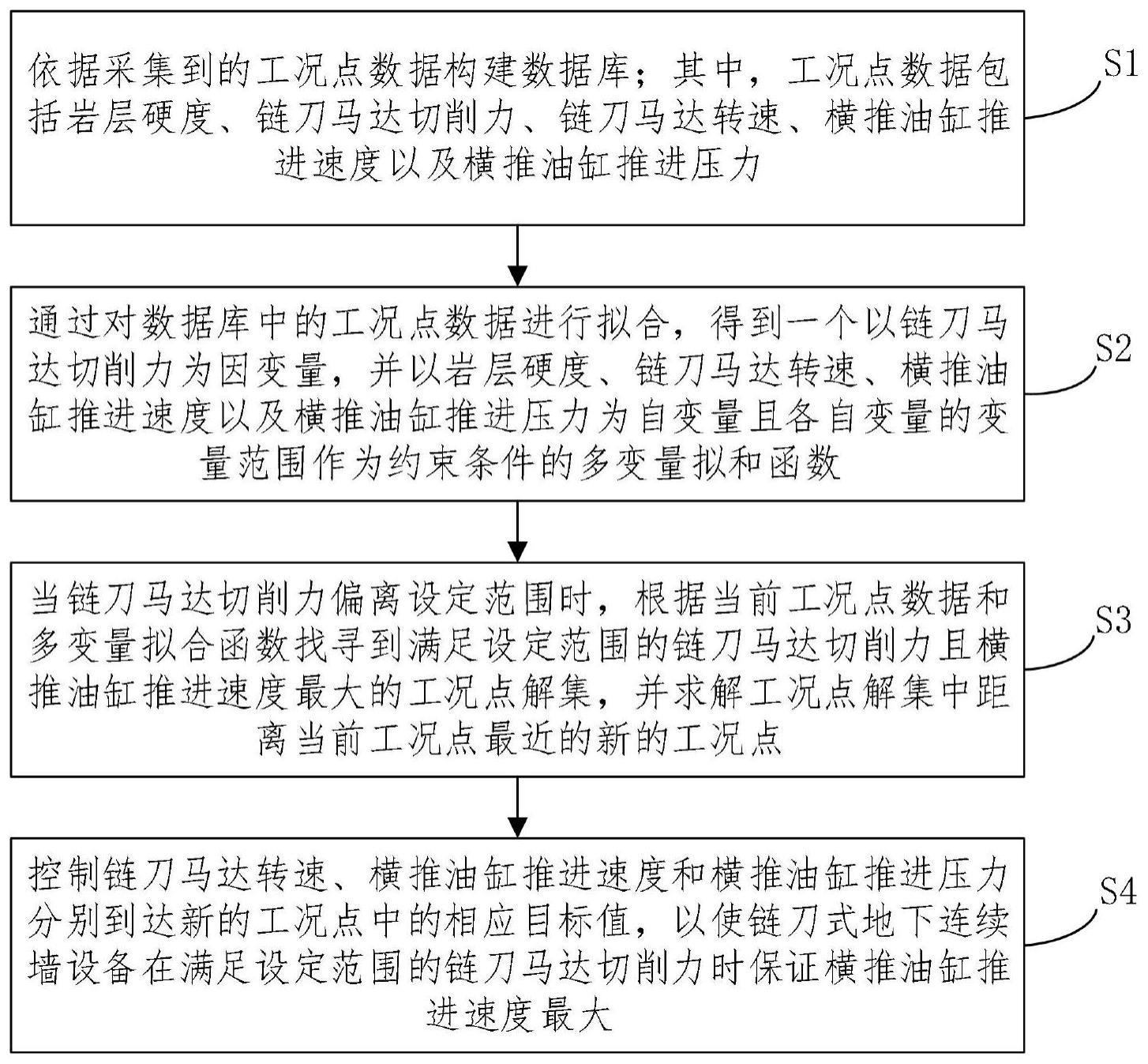
6、依据采集到的工况点数据构建数据库;其中,工况点数据包括岩层硬度、链刀马达切削力、链刀马达转速、横推油缸推进速度以及横推油缸推进压力;
7、通过对数据库中的工况点数据进行拟合,得到一个以链刀马达切削力为因变量,并以岩层硬度、链刀马达转速、横推油缸推进速度以及横推油缸推进压力为自变量且各自变量的变量范围作为约束条件的多变量拟和函数;
8、当链刀马达切削力偏离设定范围时,根据当前工况点数据和多变量拟合函数找寻到满足设定范围的链刀马达切削力且横推油缸推进速度最大的工况点解集,并求解工况点解集中距离当前工况点最近的新的工况点;
9、控制链刀马达转速、横推油缸推进速度和横推油缸推进压力分别到达新的工况点中的相应目标值,以使链刀式地下连续墙设备在满足设定范围的链刀马达切削力时保证横推油缸推进速度最大。
10、可选地,通过对数据库中的工况点数据进行拟合,得到一个以链刀马达切削力为因变量,并以岩层硬度、链刀马达转速、横推油缸推进速度以及横推油缸推进压力为自变量且各自变量的变量范围作为约束条件的多变量拟和函数包括:
11、依据数据库中工况点数据拟合成不同的函数类型,在多个函数类型中找寻出误差最小的函数类型,以作为待拟合的函数类型;
12、基于待拟合的函数类型和数据库的数据,确定以链刀马达切削力为因变量,并确定以岩层硬度、链刀马达转速、横推油缸推进速度以及横推油缸推进压力为自变量的拟合函数的各系数值;
13、通过链刀式地下连续墙设备的配置参数确定拟合函数的定义域与值域,最后输出如下多变量拟和函数:
14、f=g(n,v,p,f);
15、其中,f为链刀马达切削力,n为马达转速,p为横推油缸推进压力,v为横推油缸推进速度,f为岩层硬度。
16、可选地,当链刀马达切削力偏离设定范围时,根据当前工况点数据和多变量拟合函数找寻到满足设定范围的链刀马达切削力且横推油缸推进速度最大的工况点解集,并求解工况点解集中距离当前工况点最近的新的工况点包括:
17、获取当前工况点数据并判断链刀马达切削力是否偏离设定范围;
18、当链刀马达切削力偏离设定范围时,根据链刀马达切削力的设定范围和多变量拟合函数求得满足设定范围的链刀马达切削力且在各个自变量的定义域范围内的函数解集;
19、在此函数解集中求得横推油缸推进速度最大的子解集作为工况点解集,并在工况点解集中找寻出距离当前工况点最近的新的工况点。
20、第二方面,本发明实施例提供一种链刀式地下连续墙设备的切削力复合控制系统,包括:原动机(1)、闭式双向变量柱塞泵(2)、负载敏感变量柱塞泵(3)、链刀马达(4)、电比例多路阀(8)、横推油缸(9)、电比例溢流阀(10)、传感器组件、电控组件、机械控制组件、控制元件(13)以及梭阀(14);
21、原动机(1)的用于为闭式双向变量柱塞泵(2)和负载敏感变量柱塞泵(3)提供动力源;
22、闭式双向变量柱塞泵(2)用于为链刀马达(4)提供压力油;
23、负载敏感变量柱塞泵(3)用于为横推油缸(9)提供压力油;
24、链刀马达(4)用于为链刀式地下连续墙设备的切削机构提供动力;
25、电比例多路阀(8)用于改变液流方向从而控制横推油缸(9)的伸出和缩回;
26、横推油缸(9)用于推动链刀式地下连续墙设备的切削机构进行横向切削;
27、电比例溢流阀10并联在负载敏感变量柱塞泵(3)的反馈压力油路上,用于限制反馈压力值,从而限制推进横推油缸(9)的推进压力;
28、传感器组件用于对链刀马达(4)的a口压力和b口压力、链刀马达(4)的转速、横推油缸(9)的推进速度以及横推油缸(9)的推进压力之中的一种或多种进行检测;
29、机械控制组件用于对负载敏感变量柱塞泵(3)的出口压力进行调节;
30、电控组件用于根据获取的电信号对闭式双向变量柱塞泵(2)的排量、电比例多路阀(8)的流量以及电比例溢流阀(10)的溢流压力之中的一种或多种进行调节;
31、控制元件(13)用于接收传感器组件的检测信号并转化为对应参数值,以及进行内部运算之后向电控组件输出对应的电信号;
32、梭阀(14)用于引出横推油缸(9)的控制回路中的高压油液,用于推进压力检测。
33、可选地,
34、传感器组件包括:第一压力传感器(5)、转速传感器(6)、第二压力传感器(7),速度传感器(11)以及压力传感器(12);
35、第一压力传感器(5)用于检测链刀马达(4)的a口压力;
36、转速传感器(6)用于检测链刀马达(4)的转速;
37、第二压力传感器(7)用于检测链刀马达(4)的b口压力;
38、速度传感器(11)用于检测横推油缸(9)的推进速度;
39、压力传感器(12)用于检测横推油缸(9)的推进压力;
40、机械控制组件包括:负载敏感阀(301),负载敏感阀(301)用于调节负载敏感变量柱塞泵(3)的出口压力始终比反馈压力高一个固定值;
41、电控组件包括:电比例控制阀(201)、电比例多路阀电磁铁(801)以及电比例溢流阀电磁铁(1001);
42、电比例控制阀(201)与闭式双向变量柱塞泵(2)连接,用于根据输入的电信号调节闭式双向变量柱塞泵(2)的排量;
43、电比例多路阀电磁铁(801)与电比例多路阀(8)连接,用于根据输入的电信号调节电比例多路阀(8)的流量,从而控制横推油缸(9)的推进速度;
44、电比例溢流阀电磁铁(1001)与电比例溢流阀(10)连接,用于根据输入的电信号改变电比例溢流阀(10)的溢流压力,从而限制横推油缸(9)的推进压力。
45、可选地,根据第一压力传感器(5)和第二压力传感器(7)的数据结合第一系统配置参数组得到链刀马达(4)的链刀马达切削力与链刀马达(4)的a、b口压力的函数关系,记作:
46、f=y1(|pa-pb|),fmin≤f≤fmax (1)
47、式(1)中,pa为压力传感器(5)检测的链刀马达(4)的a口压力,pb为压力传感器(7)所检测链刀马达(4)的b口压力;第一系统配置参数组包括:链刀马达(4)的切削力f、链刀马达(4)的排量、链刀直径、减速机减速比以及传动效率;
48、根据闭式双向变量柱塞泵(2)的数据结合第二系统配置参数组,得到链刀马达转速与电比例控制阀(201)输入电流值的函数关系,记作:
49、n=y2(i2),nmin≤n≤nmax (2)
50、式(2)中,n为转速传感器(6)检测的链刀马达(4)的转速,i2为电比例控制阀(201)输入电流值;第二系统配置参数组包括:闭式双向变量柱塞泵(2)的排量与电比例控制阀(201)输入电流值的关系式、链刀马达排量、闭式双向变量柱塞泵(2)和链刀马达(4)的容积效率以及原动机转速;
51、根据电比例多路阀(8)的数据结合第三系统配置参数组,可得到横推油缸(9)的推进速度与电比例多路阀电磁铁(801)输入电流的函数关系,记作:
52、v=y3(i8),vmin≤v≤vmax (3)
53、式(3)中,v为速度传感器(11)检测的横推油缸(9)的推进速度,i8为电比例多路阀电磁铁(801)输入电流;第三系统配置参数组包括:横推油缸进油腔的作用面积、电比例多路阀(8)的输出流量与电比例多路阀电磁铁(801)输入电流的关系式;
54、根据电比例溢流阀(10)的数据结合第四系统配置参数组,可得到横推油缸(9)的推进压力p与电比例溢流阀电磁铁(1001)输入电流i10的函数关系,记作:
55、p=y4(i10),pmin≤p≤pmax (4)
56、式(4)中,p为压力传感器(12)检测的横推油缸(9)的推进压力,i10为电比例溢流阀电磁铁(1001)输入电流;第四系统配置参数组包括:横推油缸(9)的推进压力p与电比例溢流阀电磁铁(1001)输入电流i10的关系式。
57、可选地,控制元件(13)包括:
58、存储转化单元(1301),用于依据采集到的工况点数据构建数据库;其中,工况点数据包括岩层硬度、链刀马达切削力、链刀马达转速、横推油缸推进速度以及横推油缸推进压力;
59、函数拟合单元(1302),用于通过对数据库中的工况点数据进行拟合,得到一个以链刀马达切削力为因变量,并以岩层硬度、链刀马达转速、横推油缸推进速度以及横推油缸推进压力为自变量且各自变量的变量范围作为约束条件的多变量拟和函数;
60、计算单元(1303),用于当链刀马达切削力偏离设定范围时,根据当前工况点数据和多变量拟合函数找寻到满足设定范围的链刀马达切削力且横推油缸推进速度最大的工况点解集,并求解工况点解集中距离当前工况点最近的新的工况点;
61、主控单元(1304),用于控制链刀马达转速、横推油缸推进速度和横推油缸推进压力分别到达新的工况点中的相应目标值,以使链刀式地下连续墙设备在满足设定范围的链刀马达切削力时保证横推油缸推进速度最大。
62、可选地,函数拟合单元(1302)包括:
63、导入子单元,用于导入数据库中的数据;
64、函数类型确定子单元,用于依据数据库中的工况点数据拟合成不同的函数类型,在多个函数类型中找寻出误差最小的函数类型,以作为待拟合的函数类型;
65、参量确定子单元,用于基于待拟合的函数类型和数据库的数据,确定以链刀马达切削力为因变量,并确定以岩层硬度、链刀马达转速、横推油缸推进速度以及横推油缸推进压力为自变量的拟合函数的各系数值;
66、拟合函数输出子单元,通过链刀式地下连续墙设备的配置情况确定拟合函数的定义域与值域,最后输出如下多变量拟和函数:f=g(n,v,p,f);其中,f为链刀马达切削力,n为马达转速,p为横推油缸推进压力,v为横推油缸推进速度,f为岩层硬度。
67、可选地,计算单元(1303)包括:
68、工况点导入子单元,用于导入当前时刻的工况点数据和切削前采集的岩层硬度,记作(nx1,vx1,px1,f0,fx1);
69、比较子单元,用于将此刻的链刀马达切削力fx1与设定切削力f0进行比较:若链刀马达切削力fx1与设定切削力f0未发生偏离,则不做操作;若链刀马达切削力fx1与设定切削力f0发生偏离,根据设定切削力f0和多变量拟合函数求得满足设定范围的链刀马达切削力且在各个自变量定义域范围内的函数解集,记作(n0,v0,p0,f0);
70、第一求取子单元,用于在此函数解集(n0,v0,p0,f0)中求得横推油缸推进速度最大的子解集作为工况点解集,记作(n0,v0max,p0,f0);
71、第二求取子单元,用于在工况点解集(n0,v0max,p0,f0)找寻出距离当前工况点(nx1,vx1,px1,f0)最近的点(nx2,v0max,px2,f0)作为新的工况点。
72、可选地,主控单元(1304)包括:
73、第一主控子单元,用于根据公式(1)向电比例控制阀(201)输出电流i2,且通过转速传感器(6)检测链刀马达(4)的转速为nx3,进而判断nx3是否等于nx2,若nx3不等于nx2则进行负反馈调节;
74、第二主控子单元,用于根据公式(2)向电比例多路阀电磁铁(801)输出电流i8,且通过速度传感器(11)检测横推油缸(9)的推进速度vx2,进而判断vx2是否等于v0max,若vx2不等于v0max则进行负反馈调节;
75、第三主控子单元,用于根据公式(3)向电比例溢流阀电磁铁(1001)输出电流i10,且通过压力传感器(12)检测横推油缸(9)的推进压力px3,进而判断px3是否等于px2,若px3不等于px2则进行负反馈调节。
76、(三)有益效果
77、本发明的有益效果是:本发明采用对施工数据进行数学建模的方法,通过对链刀马达切削力的主要影响因素进行函数拟合,从定量的角度分析各影响因素的相关性,在施工过程中精确控制各影响因素的变化量,可以提高施工的规范性,且拟合的函数关系式对于改进设备、优化工法等方面均具有较大的参考意义。再者本发明采用多变量同时调节的控制方法,可实现多维度调整设备的切削工况,从而保证链刀式地下连续墙设备以更快更精准的控制方法达到预期设定值。
- 还没有人留言评论。精彩留言会获得点赞!