一种基于单目视觉的基坑多测点一体化监测方法
本发明涉及基坑变形监测领域,具体涉及一种基于单目视觉的基坑多测点一体化监测方法。
背景技术:
1、随着城市建设的发展,地下轨道交通、地下综合商场和各类高层建筑的建设对基坑工程的施工提出了更高要求。由于地质情况的不确定性、复杂性、差异性等因素,基坑工程存在较大风险,其发生事故的概论远高于其他工程。为确保基坑施工的安全性和稳定性,需要在施工过程中同步赋予严密的监测系统对基坑进行全程实时的监控,以便及时发现由于设计缺陷、施工管理不到位和环境变化等因素所导致的潜在安全隐患。因此,基坑变形监测已成为保障基坑施工安全至关重要的一环。
2、目前,基坑变形监测主要以采用全站仪和水准仪的人工监测方法为主,该方法由于依赖人为操作且测量工序繁琐,其监测数据存在目视误差大、可靠性低、时效性差、监测周期长等缺点,尤其是较长的人工监测周期,导致监测数据不连续,施工现场的数据分析往往只能停留在简单的数据对比,即根据规范要求的阈值来评价基坑安全状况。此外,由于人工监测无法实时反馈监测数据,数据分析具有滞后性,基坑工程中可能存在预警不及时的安全隐患。为了优化基坑变形的预警方式,也为了更好地指导实际施工,国内外学者尝试利用卷积神经网络、有限元分析等技术对基坑变形进行预测,这极大程度地提高了基坑施工的效率和安全性,然而卷积神经网络和有限元分析往往需要极为全面且连续的监测数据作为分析的基础,显然人工监测所得到的数据无法满足这一要求,连续实时的监测数据逐步成为当前基坑工程最为迫切的需求之一。在这一驱动力下,传统监测设备得到了改进,其他领域的连续实时测量技术也被尝试用于基坑监测,但是这些设备与技术都存在着一定局限性。静力水准仪可在基坑中多点铺设并连续性地反馈监测数据但其仅能反馈监测点的竖向位移;三维激光技术对基坑的变形监测具有一定可行性,但其存在精度要求不达标,易受天气环境影响等缺陷;北斗卫星技术系统在基坑监测方面的运用条件苛刻,需要有较为开阔的空间用以设置无竖向遮挡的基准站,且其精度较为有限,同样无法满足基坑变形监测规范的要求;全站仪机器人具有较高的精度,然而其造价高昂,维护成本较高,当前的基坑工程普遍不具有全面使用的条件。总的来说,当前的连续实时监测技术还无法满足基坑工程的需求,基坑工程需要一种兼顾效率、精度和性价比的连续实时监测技术。
技术实现思路
1、本发明要克服现有技术存在的以上问题,提供一种基于单目视觉的基坑多测点一体化监测方法,实现基坑变形连续实时监测,提升监测效率,降低监测成本。
2、为解决上述技术问题,本发明所采取的技术方案为:
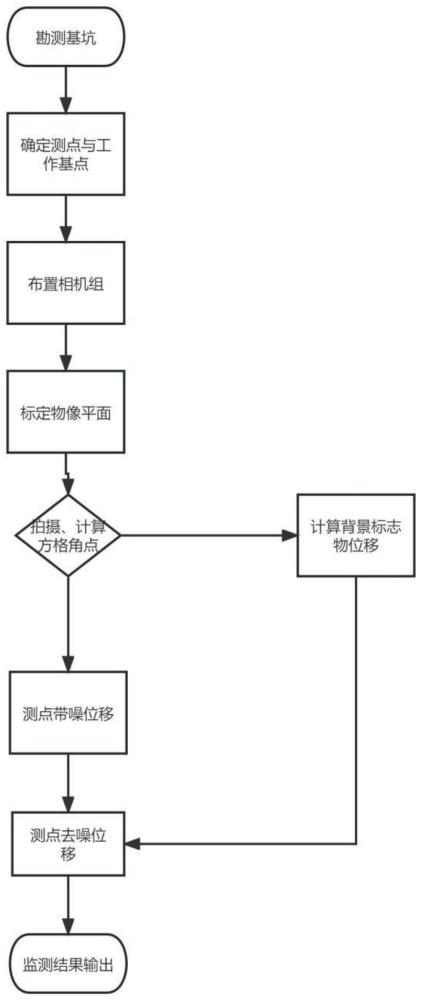
3、一种基于单目视觉的基坑多测点一体化监测方法,包括如下步骤:
4、(1)勘察基坑,选取监测点与工作基点位置。
5、根据《建筑基坑工程监测技术标准》和《建筑变形测量规范》选取基坑围护墙位移监测点,监测点布置于基坑冠梁上,距离应介于10~15m,布置在基坑各侧边中部、阳角处、邻近保护对象的部位。
6、将相机设置于基坑环境中的不动点位置以减少由相机位置变动产生的测量误差。根据《建筑变形测量规范》,距离建筑基坑边缘2倍基坑深度以上的区域的位移可忽略不计,故将此区域拟定为视觉测量工作基点的设置范围。
7、(2)确定相机种类(红外相机),选择相机、镜头参数,构建多测点水平与竖向位移一体化的同步监测系统。
8、采用环境适应性更好的红外相机进行图像采集,在光照良好的条件下,红外相机直接接受红外波段光成像;而在照度不足时,红外相机便可通过红外发射二极管产生主动红外光实现补光。
9、选择相机参数:基于基坑监测的需求,选择低帧频,高信噪比,大动态范围的红外相机,分辨率则依据被监测基坑尺寸及测点布置情况确定。
10、选择相机镜头:针对基坑围护墙的监测点往往呈线性或接近线性分布的特点,使用小视场角大景深的镜头进行拍摄(视场角建议选择5°~10°)。在实际工程应用中,应根据精度要求,利用工作距离、视场、相机芯片尺寸、焦距和景深之间的相互关系,综合考虑性价比以确定合适的镜头。
11、(3)布置测点靶标,浇筑工作基点相机监测墩,安装相机组及补光设备,确定背景标志物并布置校准靶标。
12、安装测点靶标:在监测点安装标靶底座,并用铆钉枪进行固定。使用万向节与机械升降杆将靶标安装在底座上,以实现靶标角度、高度灵活调整,靶标按序表示为t1、t2、t3......tn。
13、制作底座及布置相机组:使用现浇钢筋混凝土法在工作基点制作相机监测墩,安装强制对中底盘。将相机安装至强制对中底盘上,并设置红外补光灯。
14、选取背景标志物及校准靶标:对于每台相机,需要在拍摄图像中确定一个或多个静止的背景标志物以便后续修正相机的偏移误差,将相机监测墩作为背景标志物,在监测墩表面布置方格靶标作为校准靶标。
15、(4)校准惯性测量单元(inertial measurement unit,imu),利用imu调整靶标与相机位姿,以实现靶标平面与对应的相机平面平行。
16、将imu分别平放于工作基点与靶标平台上,得到两处的磁力计数值,随后调整靶标万向节与工作基点对中底盘,直到两处的磁力计读数一致,完成初步物像平面平行标定,随后便可应用角速度计对校准结果进行检验:将imu放置于相机监测墩强制对中底盘上,稳定后将imu尽量平稳地移动至该工作基点所对应的靶标平台上,同样等待传感器稳定,随后使用计算软件将移动过程中角速度计与加速度计的数值积分,得到整体的位移与欧拉角转动量,进而求得imu在靶标处位姿与监测墩处的相对位姿,判断其变化量是否在被允许的误差区间内,否则对靶标的万向节作相应调整,而后重复上述步骤直至靶标平面与对应的相机平面平行。
17、(5)预热相机,设置拍摄频率,对测点靶标连续、实时监测。
18、启动相机组,等待相机温度上升至常态工作均温,设置拍摄频率,具体频率应综合考虑设备条件、基坑尺寸、工作环境等因素,对于基坑监测,拍摄频率建议不小于每分钟10次。获取实时监测图像pct,c表示拍摄相机的编号,t为图像的时序编号,代表其拍摄顺序。
19、(6)使用边缘计算方法,划分图像感兴趣区域,定位靶标像素,实时解算方格靶标角点。
20、采用边缘计算方式在相机端实时对图像进行解算,即通过相机集成的处理器实现图像处理,后续的测点位移计算与背景标志物位移计算同样采用相机端直接解算方式。
21、定位靶标图像所在的感兴趣区域,使用blob(小区块计算)分析图像中相同或相似灰度像素组成的连通域,并提取每一连通域的灰度突变极值点,将各极值点像素拟合,得到边缘图像,并与靶标形状比较,得到图像中的代表靶标的感兴趣区域。
22、使用susan角点检测算子计算各感兴趣区域内靶标角点,susan算法采用一个圆形模板,模型圆心为核,圆形区域内每一个像素的灰度值与中心像素的灰度值比较,取灰度值与中心像素相近的像素组成usan区域(同化核分割相似区域)。
23、模板圆各点与核心点的灰度值用下式比较
24、
25、随后计算usan区域大小
26、
27、式中:(x0,y0)为核心点位置;(x,y)为模板m(x,y)其中其他像素的位置;f(x0,y0)和f(x,y)分别表示(x0,y0)和(x,y)处像素的灰度;t表示灰度差值阈值;函数c表示比较输出结果,由模板中所有像素参与运算得出。取几何阈值g=smax/2,smax为一个模板圆能取到的最大s值,判断角点的响应函数便为
28、
29、随后对其应用局部极大值抑制便可得到所求的靶标方格角点i表示方格角点所在感兴趣区域靶标对应的编号,j表示方格角点在靶标中按坐标轴方向的编号,t表示图像的时序编号。
30、(7)对初始帧图像,计算各靶标对应比例系数μi,解算各测点及校准点初始坐标。
31、通过步骤(6)计算得到图像所包含感兴趣区域内的靶标方格角点坐标,使用类模板匹配算法,将预设好的靶标尺寸与实际识别得到靶标方格角点的像素间距对比,得到各靶标对应的比例系数μi,随后将图像坐标系内特征角点坐标换算得靶标各方格角点在相机坐标系中的初始坐标
32、
33、
34、其中xic表示测点在与围护墙正交方向上的坐标值,yic表示测点在竖直方向的坐标值。测点靶标与校准靶标对应的像素点真实坐标便为
35、
36、(8)对于后续每一帧,解算各测点及校准点坐标,与初始帧作差得到测点带噪位移并解算背景静止标志物位移,修正后得到测点去噪位移
37、对于后续图像,使用步骤(7)求得的不同靶标所对应的比例系数,分别解算各靶标方格角点在相机坐标系下的时序坐标并减去初始坐标得到测点的带噪位移
38、
39、
40、式中m是单个感兴趣区域内的方格角点数较小值,即t时序下识别的方格角点数与初始帧方格角点数中的较小值,以避免方格角点识别缺失对测点位移的影响。
41、在计算了监测点位移后,通过计算背景静止标志物的位移修正由相机位移造成的误差。背景静止物选取相机监测墩上的校准靶标,然后通过测点靶标相同的解算方式得到校准靶标的位移随后将测点带噪位移减去同一帧图像的校准靶标位移得到测点去噪位移对后续得到的图像序列重复上述步骤,即可实现测点位移的实时精确监测。
42、进一步的,在s1中,由于基坑边缘线普遍为直线或近似于直线,监测点的布置也近乎共线,为了保证这些监测点上所布置的靶标都处于相机的视场内,工作基点应布置在基坑边缘延长线附近,工作基点与基坑边缘延长线的垂直距离应根据相机视场角和测点间距进行调整。
43、进一步的,在s3中,在相机组监测到环境红外照度不足时,系统自启动环绕镜头的红外灯点阵,依靠红外灯发出红外线照射靶标及背景物,经过漫反射,被监测相机接收,形成可分辨的灰度图像。
44、进一步的,在s4中,imu在使用前需要校准各传感器校准imu磁力计:将磁力计正面、反面向上分别旋转一圈,在输出数据中将求得的极值的差值作为幅值修正,以实现磁力计的修正。
45、校准imu加速度计:将传感器各个面分别朝下,记录加速度计在重力作用下的读数,通过计算得到修正后的尺度因子。
46、校准imu陀螺仪:对于陀螺仪的误差因素主要是温漂,即工作温度上升所带来的误差,故在选择imu时着重考虑功率及散热,观察实际工作温度,在imu核心温度过高时暂停测量以减小温漂误差。
47、进一步的,在s6中,本发明选择的是平面方格特征靶标,在后续可以精确定位靶标角点,并提升测点位移的鲁棒性。由于本发明是对多测点位移的一体化监测,单部相机对应拍摄多个靶标,即图像上需要定位多个感兴趣区域,分别对应相机景深范围内的各测点靶标与用于修正相机偏移的校准靶标。
48、与现有技术相比,本发明具有以下有益效果:
49、1.本发明基于单目视觉测量技术实现了单部相机对基坑多测点水平与竖向位移一体化实时连续监测,从而提升了监测效率与经济性。
50、2.本发明应用主动红外技术以实现在复杂工况下设备的良好表现,具有更好的环境适应性与用户友好性。
51、3.本发明通过基于静止背景标志物的算法,实现了对于相机自身测量误差的自适应修正,有效地提升了测量精度。
52、4.本发明采用边缘计算方式在相机端实时对图像进行处理,由相机组解算靶标坐标,实现了基坑变形连续实时监测。
53、上述说明仅是本发明技术方案的概述,为了能够更清楚了解本发明的技术手段,并可依照说明书的内容予以实施,以下以本发明的较佳实施例并配合附图详细说明如后。本发明的具体实施方式由以下实例及其附图详细给出。
- 还没有人留言评论。精彩留言会获得点赞!