一种面向地下管廊的维修系统及方法
本发明涉及地下管廊维修,具体涉及一种面向地下管廊的维修系统及方法。
背景技术:
1、地下综合管廊是指在城市地下用于集中铺设各类市政管线的公共隧道;随着城市化进程的加速和交通基础设施的发展需求,地下管廊逐渐成为城市建设的不可或缺的一部分;我国对地下管廊需求逐年递增。
2、但是,目前存在问题在于:地下综合管廊内一旦发生事故,采用传统人工方式对故障点进行维修时,会造成安全风险指数的提高。
技术实现思路
1、有鉴于此,本发明的目的在于提供一种面向地下管廊的维修系统及方法,解决人工对地下管廊发生事故维修时风险高的问题。
2、第一方面,本发明公开了一种面向地下管廊的维修系统,包括巡检机器人,巡检机器人与第一控制器连接,巡检机器人用于对地下管廊内进行巡检;还包括维修机器人,维修机器人与第二控制器连接,维修机器人用于对地下管廊内进行维修;快拆底盘上安装环境传感器。
3、具体的,巡检机器人包括快拆底盘,快拆底盘的两侧分别以线型阵列方式安装至少两个滚轮,快拆底盘上安装驱动电机,通过驱动电机驱动滚轮转动,驱动电机与第一控制器电连接。
4、更加具体的,快拆底盘上形成滑槽部,锁定板转动连接在滑槽部的槽口一侧;锁定板的另一侧上安装定位锁销,定位锁销用于和槽口另一侧连接;锁定板与滑槽部共同形成滑行通道,滑行通道用于和地下管廊上的长轨道形成滑动连接。
5、优化的,快拆底盘上安装磁导航传感器,rfid标签安装于地下管廊廊壁上,磁导航传感器用于接受rfid标签发出的信号;磁导航传感器接受信号后,向第一控制器传递信号,并向滚轮发出移动的指令。
6、优化的,快拆底盘上安装双目视觉摄像头。
7、具体的,环境传感器为红外测温传感器、空气检测传感器、放电检测传感器、火灾检测传感器、温湿度检测传感器,且红外测温传感器、空气检测传感器、放电检测传感器、火灾检测传感器、温湿度检测传感器与第一控制器进行电连接。
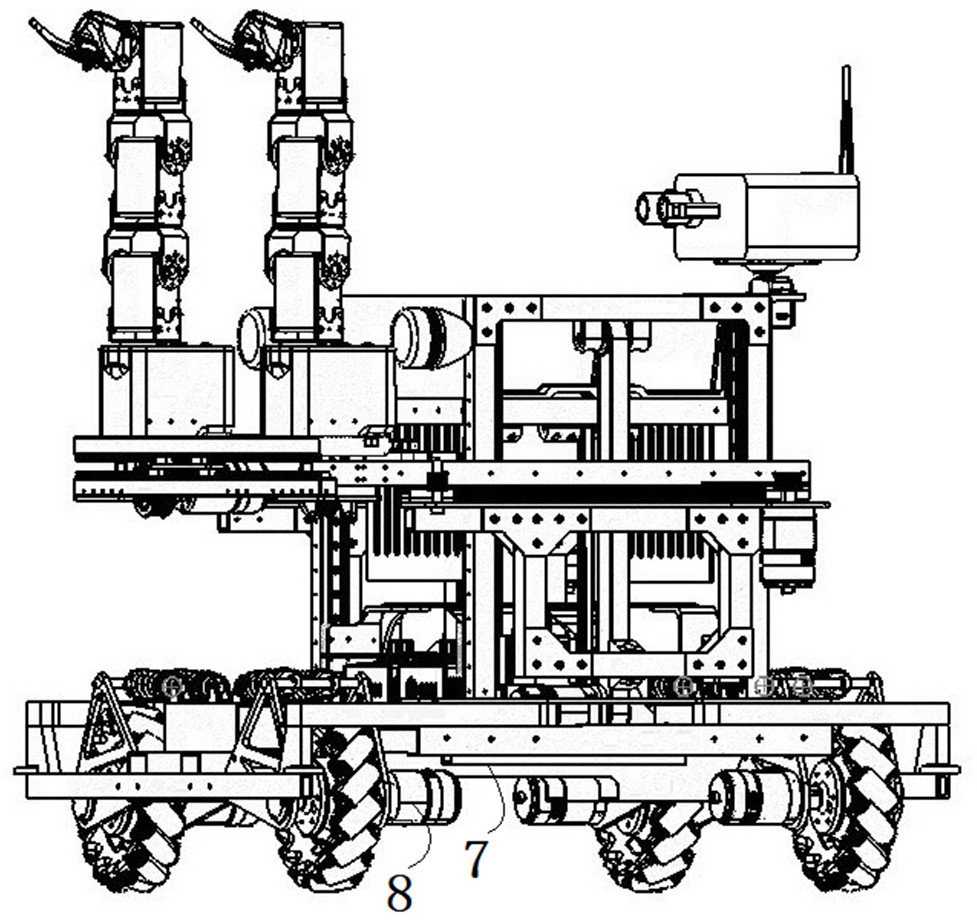
8、具体的,维修机器人包括支撑底盘,支撑底盘上设有用于驱动支撑底盘移动的底盘驱动单元,支撑底盘上设有升降单元,升降单元的一端设有机械臂单元,升降单元的另一端安装有第二控制器;支撑底盘的左右两侧分别通过独立悬挂结构设有两组底盘轮组,底盘轮组与底盘驱动单元传动连接,底盘驱动单元连接在支撑底盘上。
9、更加具体的,独立悬挂结构包括支撑刚性构件,支撑刚性构件的一端连接底盘轮组;支撑刚性构件另一端与支撑底盘活动连接;支撑刚性构件上转动连接第一滑动副,第一滑动副上滑动连接第二滑动副,第一滑动副、第二滑动副通过减震弹性部件连接,第二滑动副与支撑底盘连接。
10、第二方面,本发明公开了一种面向地下管廊的维修方法,其特征在于:应用于权利要求1至9中任意一项所述的面向地下管廊的维修系统,包括如下步骤:
11、s1,巡检机器人通过机器视觉-电磁场-gps进行自主巡检和导航,以传感器及视觉对于不同工作的某一点或某段实行定点检测;
12、s2,到达任务地点后,巡检机器人以嵌入式计算机为控制系统,自主作业将巡检图像与数据进行后台分析与判断并实时反馈数据,若判断出安全隐患时,进行报警并实时将数据传回pc端;
13、s3,维修机器人接收到报警信号时,利用定位至安全隐患处,通过对隐患处的问题进行智能检测,然后进行自主计算与自主维修,通过5g网络数据高速传回,实时掌握隐患信息及修复情况;
14、s4,在维修机器人对隐患处自主维修后,将自主返回充电桩准备下一次智能维修;或通过实时补充电能前往下一处隐患处;
15、s5,当巡检机器人再次进行维修时,切换至人工控制模式,进行远程控制对原存有隐患处的地点进行查看。
16、本发明的有益效果在于:
17、本发明中,巡检机器人进行自主巡检,搭配磁导航+gps+激光雷达slam导航算法+rfid标签多数据融合处理,可实现自主移动与最短路径的优化,并且通过5g数据传回和gps进行定位,实现对在各种环境中的地下管廊的检测,若发现隐患则实行报警,维修机器人通过搭配slam+ros的运行方式,通过slam+ros可实现实时场景建模,障碍物检测识别与定位、自主作业规划、自主越障、自主巡检。搭配双目视觉摄像头,可通过slam进行实时建模及深度学习算法识别,可使用双柔性机械臂进行管道缺陷修复及各类维修作业;接收信号后,根据定位进行自主规划路线,自主前往隐患出进行修复,同时可提供自主巡检或人工控制两种运行模式,实现远程控制,对某一点或某段进行定点检测;同时降低巡检工作者劳动强度,改善操作环境,降低工作风险,提高工作空间使用率。
技术特征:
1.一种面向地下管廊的维修系统,其特征在于:包括巡检机器人,巡检机器人与第一控制器连接,巡检机器人用于对地下管廊内进行巡检;还包括维修机器人,维修机器人与第二控制器连接,维修机器人用于对地下管廊内进行维修;维修机器人上安装环境传感器。
2.根据权利要求1所述的面向地下管廊的维修系统,其特征在于:巡检机器人包括快拆底盘(1),快拆底盘(1)的两侧分别以线型阵列方式安装至少两个滚轮(4),快拆底盘(1)上安装驱动电机,通过驱动电机驱动滚轮(4)转动,驱动电机与第一控制器电连接。
3.根据权利要求2所述的面向地下管廊的维修系统,其特征在于:快拆底盘(1)上形成滑槽部,锁定板(2)转动连接在滑槽部的槽口一侧;锁定板(2)的另一侧上安装定位锁销,定位锁销用于和槽口另一侧连接;锁定板(2)与滑槽部共同形成滑行通道(3),滑行通道(3)用于和地下管廊上的长轨道形成滑动连接。
4.根据权利要求2所述的面向地下管廊的维修系统,其特征在于:快拆底盘(1)上安装磁导航传感器,rfid标签安装于地下管廊廊壁上,磁导航传感器用于接受rfid标签发出的信号;磁导航传感器接受信号后,向第一控制器传递信号,并向滚轮(4)发出移动的指令。
5.根据权利要求2所述的面向地下管廊的维修系统,其特征在于:快拆底盘(1)上安装双目视觉摄像头(6)。
6.根据权利要求1所述的面向地下管廊的维修系统,其特征在于:环境传感器为红外测温传感器、空气检测传感器、放电检测传感器、火灾检测传感器、温湿度检测传感器,且红外测温传感器、空气检测传感器、放电检测传感器、火灾检测传感器、温湿度检测传感器与第一控制器进行电连接。
7.根据权利要求1所述的面向地下管廊的维修系统,其特征在于:维修机器人包括支撑底盘(7),支撑底盘(7)上设有用于驱动支撑底盘(7)移动的底盘驱动单元(8),支撑底盘(7)上设有升降单元,升降单元的一端设有机械臂(22)单元,升降单元的另一端安装有第二控制器;支撑底盘(7)的左右两侧分别通过独立悬挂结构(9)设有两组底盘轮组(15),底盘轮组(15)与底盘驱动单元(8)传动连接,底盘驱动单元(8)连接在支撑底盘(7)上。
8.根据权利要求7所述的面向地下管廊的维修系统,其特征在于:独立悬挂结构(9)包括支撑刚性构件(10),支撑刚性构件(10)的一端连接底盘轮组(15);支撑刚性构件(10)另一端与支撑底盘(7)活动连接;支撑刚性构件(10)上转动连接第一滑动副(12),第一滑动副(12)上滑动连接第二滑动副(13),第一滑动副(12)、第二滑动副(13)通过减震弹性部件(14)连接,第二滑动副(13)与支撑底盘(7)连接。
9.一种面向地下管廊的维修方法,其特征在于:应用于权利要求1至8中任意一项所述的面向地下管廊的维修系统,包括如下步骤:
技术总结
本申请公开一种面向地下管廊的维修系统及方法,面向地下管廊的维修系统包括巡检机器人,巡检机器人与第一控制器连接,巡检机器人用于对地下管廊内进行巡检;还包括维修机器人,维修机器人与第二控制器连接,维修机器人用于对地下管廊内进行维修;快拆底盘上安装环境传感器;以及应用面向地下管廊的维修系统的维修方法;本发明解决人工对地下管廊发生事故维修时风险高的问题。
技术研发人员:李建军,黄天勤,刘宴佐,陈荣健,林泽楷,高磊
受保护的技术使用者:内蒙古科技大学
技术研发日:
技术公布日:2024/2/25
- 还没有人留言评论。精彩留言会获得点赞!