一种适用于挖掘发动机与ISG电机的控制系统及方法与流程
本发明属于新能源工程机械领域,具体涉及一种适用于挖掘发动机与isg电机的控制系统及方法。
背景技术:
1、挖掘机是一种多用途的工程机械,经常用于挖掘、平地、装载、破碎等形式作业,其工作周期性强,且外负载复杂多变,发动机因负载多变,出现转速不断波动,进一步造成发动机经常在高效区和低效区之间波动,在此瞬态工况下,油耗明显变高。油耗增加会增加客户使用成本。
2、为了实现能耗节约,混合动力挖掘机引入isg电机,挖掘机由发动机和isg电机同轴并联联合驱动,isg电机可以实现驱动和发电两种工作模式,驱动模式辅助发动机驱动,以提高发动机的负载响应;发电模式将发动机多余功率给电池充电,电池可以驱动挖掘机的附件如电子水泵、风扇、电回转等机构。因为是同轴并联的原因,发动机和电机会保持相同的转速,isg电机可以辅助驱动,相比于发动机单独驱动,有更好的调速性能,而且电机驱动的控制精度高、响应快,因此可以用来削弱突变负载对发动机的影响。
3、目前一般是基于发动机转速差通过plc、步进电机、齿轮齿条控制发动机油门,来实现对发动机恒转速控制,缺点是响应时间长、且未提及削弱负载扰动的能力。对于负载多变的动力系统,导致发动机处于低效区时间相对较长。
技术实现思路
1、针对上述问题,本发明提出一种适用于挖掘发动机与isg电机的控制系统及方法,控制isg电机对发动机进行转矩补偿,使发动机转速快速恢复到最佳油耗区,减少作业油耗。
2、为了实现上述技术目的,达到上述技术效果,本发明通过以下技术方案实现:
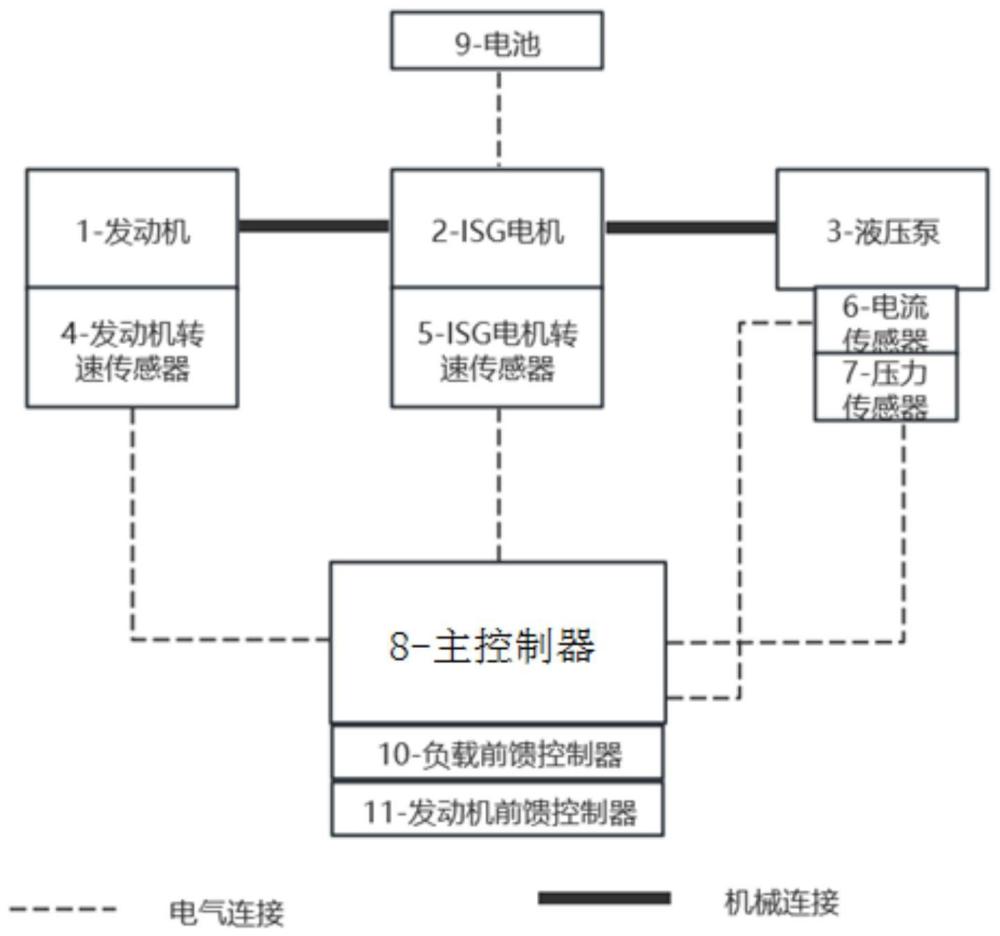
3、第一方面,本发明提供了一种适用于挖掘发动机与isg电机的控制系统,包括:发动机、isg电机、液压泵、传感器模块和主控制器;
4、所述传感器模块分别与所述发动机、isg电机和液压泵相连,采集液压泵的压力和排量,以及isg电机的转速和发动机的转速;
5、所述主控制器与所述传感器模块相连,基于液压泵的压力和排量,分别生成第一补偿转矩和第二补偿转矩;基于发动机的转速和isg电机的转速,生成第三补偿转矩和第四补偿转矩;基于发动机转速变化量,基于pi控制算法,计算得到第五补偿转矩;筛选出第一补偿转矩、第二补偿转矩、第三补偿转矩和第四补偿转矩中的最大值,与所述第五补偿转矩求和后作为isg电机目标补偿转矩,基于isg电机目标补偿转矩控制isg电机对发动机进行转矩补偿。
6、可选地,所述主控制器基于发动机转速n1,计算出发动机转速变化量δn1,δn1=f(n1);
7、当发动机转速变化量δn1大于设定阈值,则计算isg电机目标补偿转矩;
8、或者,所述主控制器基于传感器模块采集到的液压泵实际压力p1,计算出液压泵压力差δp,δp=f(p1);
9、当液压泵压力差δp大于设定阈值,则计算isg电机目标补偿转矩。
10、可选地,所述传感器模块包括:发动机转速传感器、isg电机转速传感器、电流传感器和压力传感器;
11、所述发动机转速传感器分别与所述发动机和主控制器相连;
12、所述isg电机转速传感器分别与所述isg电机和主控制器相连;
13、所述电流传感器分别与所述液压泵和主控制器相连;
14、所述压力传感器分别与所述液压泵和主控制器相连。
15、可选地,所述主控制器包括负载前馈控制器和发动机前馈控制器。
16、可选地,当挖掘机作业受阻,液压泵的压力急剧上升,产生液压泵压力差δp,若液压泵压力差δp大于设定阈值,则经负载前馈控制器计算得到第一补偿转矩,所述第一补偿转矩的计算公式为:
17、
18、其中,t1为第一补偿转矩,k1为负载前馈控制器的压力补偿系数,δp为液压泵压力差;v1为液压泵实际排量,v1由主控制器基于传感器模块采集到的液压泵实际电流i1计算获得,v1=f(i1)。
19、可选地,当液压泵突然加速动作,液压泵的排量急剧上升,产生液压泵排量差δv,若液压泵排量差δv大于设定阈值,则经负载前馈控制器计算得到第二补偿转矩,所述第二补偿转矩的计算公式为:
20、
21、其中,t2为第一补偿转矩,k2为负载前馈控制器的排量补偿系数,δv为液压泵排量差;p1为液压泵实际压力,由传感器模块采集获得。
22、可选地,当挖掘机作业受阻,液压泵的压力会急剧上升,产生液压泵压力差δp,因发动机压力增大,发动机转速突然下降δnf1,则经发动机前馈控制器计算得到第三补偿转矩,所述第三补偿转矩的计算公式为:
23、
24、其中,t3为第三补偿转矩,k3为发动机前馈控制器的压力补偿系数,pisg为isg电机的功率。
25、可选地,当液压泵突然加速动作,液压泵排量急剧增加,产生液压泵排量差δv,因发动机排量增大,转速突然下降δnf2,则经发动机前馈控制器计算得到第四补偿转矩,所述第四补偿转矩的计算公式为:
26、
27、其中,t4为第四补偿转矩,k4为发动机前馈控制器的排量补偿系数,pisg为isg电机的功率。
28、可选地,获取根据液压泵压力差δp、液压泵排量差δv,创建的比例控制参数kp的map数值表;
29、主控制器依据检测到的液压泵压力差δp、液压泵排量差δv,找到对应的比例控制参数kp;
30、当发动机实际转速与目标转速的差值δn2的绝对值小于设定阈值时,启动积分控制ki,当积分值超过上限kiupl,仅累积负偏差;当积分值超出下限kidownl时,仅累积正偏差;为积分计算值,e(t)为关于差值δn2的累计积分函数,t为积分时间;kiupl为积分上限值,kidownl为积分下限值;
31、最终计算得到第五补偿转矩t5,
32、第二方面,本发明提供了一种适用于挖掘发动机与isg电机的控制方法,包括:
33、利用传感器模块分别采集液压泵的压力和排量,以及isg电机的转速和发动机的转速;
34、利用主控制器液压泵的压力和排量,分别生成第一补偿转矩和第二补偿转矩;基于发动机的转速和isg电机的转速,生成第三补偿转矩和第四补偿转矩;基于发动机转速变化量,基于pi控制算法,计算得到第五补偿转矩;筛选出第一补偿转矩、第二补偿转矩、第三补偿转矩和第四补偿转矩中的最大值,与所述第五补偿转矩求和后作为isg电机目标补偿转矩,基于isg电机目标补偿转矩控制isg电机对发动机进行转矩补偿。
35、与现有技术相比,本发明的有益效果:
36、本发明根据液压泵(即负载)突变情况,基于液压泵的压力和排量,分别生成第一补偿转矩和第二补偿转矩;根据发动机转速突变情况,基于发动机的转速和isg电机的转速,生成第三补偿转矩和第四补偿转矩;还根据发动机转速突变情况,基于发动机转速变化量,基于pi控制算法,计算得到第五补偿转矩,筛选出第一补偿转矩、第二补偿转矩、第三补偿转矩和第四补偿转矩中的最大值,与所述第五补偿转矩求和后作为isg电机目标补偿转矩,基于isg电机目标补偿转矩控制isg电机对发动机进行转矩补偿,不仅能够带动发动机快速回归设定转速、减小发动机摩擦功、提高节油率,还能够实现多维度提高isg电机转矩转速控制精度,以及提高转速和转矩响应速度及控制精度。
- 还没有人留言评论。精彩留言会获得点赞!