一种柔性自驱式海洋静力触探系统及其使用方法
本发明涉及工程勘察中的静力触探,尤其涉及一种柔性自驱式海洋静力触探系统及其使用方法。
背景技术:
1、海洋静力触探是一种用于获取海底地质和土壤性质的技术方法。它通过测量水下的静水压力变化来推断海底地质特征,包括沉积物类型、厚度、密度等。这项技术在海洋工程、海洋地质、海洋资源开发等领域具有广泛的应用价值。目前,国内外海洋静力触探技术趋于成熟,设备比较完善。能够在多种地质条件下开展静力触探工作。在海洋土层中开展静力触探工作,国内外有三种施工工艺较为成熟,即平台式(platforrn)、海床式(seabed)和井下式(downhole),由此也研制出三种对应的贯入设备:(1)平台式的主要特点是贯入设备安装在固定平台上,触探操作时探杆需要首先从平台甲板经过水层后才能贯入海底地层;(2)海床式的主要特点是贯入设备稳定支撑于海床面上,将探头直接连续的贯入海底以取得探头所检测到的地层应力;(3)井下式的主要特点是钻探与静力触探相结合的循环贯入方式,触探操作时贯入装置设置于钻杆内部并将探头从钻杆底部经钻头贯入海底地层,而钻探主要负责扫除触探已经完成的地层以便开始下一循环周期的触探操作。
2、现有技术中,海洋静力触探在实际操作中普遍出现的问题是,刚性探杆拼接工序繁琐,触探工作需要大型设备,在海底这一特殊工作环境下尤为复杂。若采用柔性触探杆连续贯入方式,在贯入机构中,柔性触探杆缠绕在绞盘上,经过滚筒矫直导正后垂直贯入。但柔性探杆材料要求较高,成本大,探杆经过多次重复弯曲会残留应力,反复触探试验后会产生误差。同时,柔性触探杆自身刚度不足,触探试验中随着贯入深度增加探杆长细比逐渐变大,且海洋土壤环境侧向约束较弱,柔性触探杆易失稳侧向弯曲导致数据失真。
3、因此,如何提供一种柔性自驱式海洋静力触探系统,使其具有在工作时保证连续贯入并保持柔性触探杆稳定的技术效果,是本领域技术人员亟需解决的技术问题。
技术实现思路
1、有鉴于现有技术中存在的触探设备无法小型化简单化和在保证探头连续贯入的前提下存在的柔性触探杆易失稳的问题,本发明所要解决的技术问题是提供一种柔性自驱式海洋静力触探系统,使探头小型化简单化,同时在工作时保证连续贯入并保持柔性触探杆稳定。
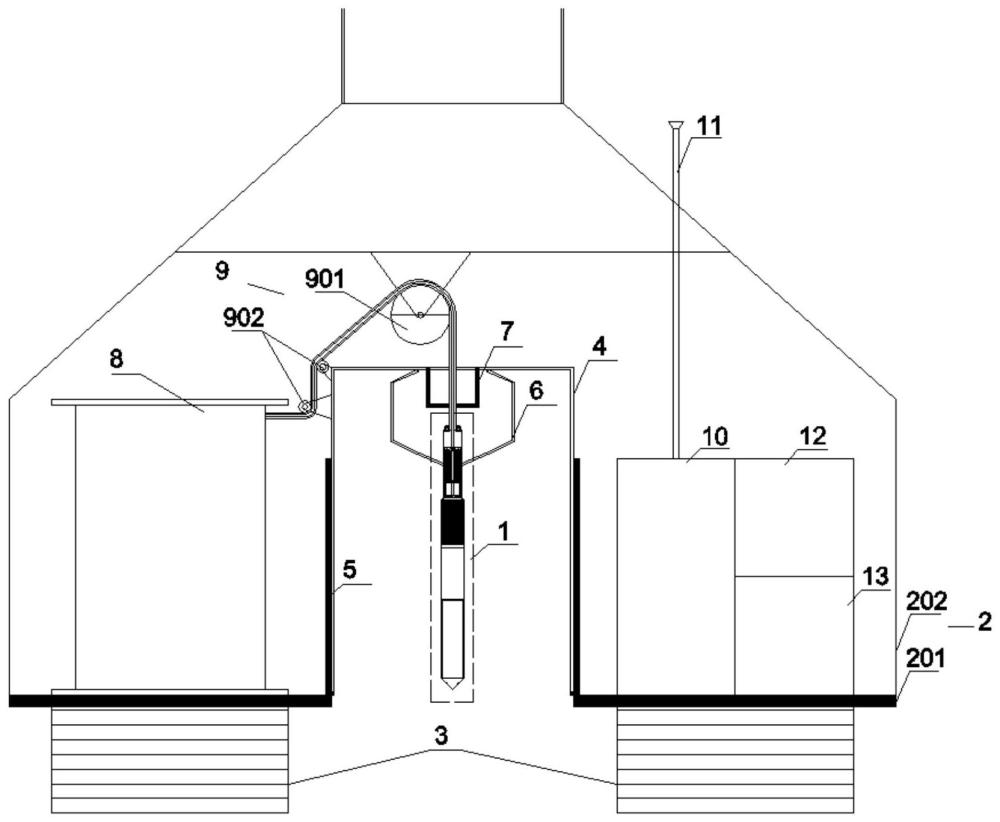
2、为实现上述目的,本发明提供了一种柔性自驱式海洋静力触探系统,所述柔性自驱式海洋静力触探系统包括:水动力自驱式探头装置,所述水动力自驱式探头装置包括供水数据传输管和动力喷嘴装置,所述供水数据传输管与所述动力喷嘴装置连接;本体框架,所述本体框架包括主承载平台框架和次平台框架,所述主承载平台框架设置于动力履带上方;保护罩,所述保护罩通过可控滑轨设置在所述主承载平台框架上;夹持器,所述夹持器设置在所述保护罩的内部顶端;反力感应架,所述反力感应架设置在所述保护罩的内部顶端,被所述夹持器包围;绞盘,所述绞盘设置在所述主承载平台框架一侧的上部,所述供水数据传输管缠绕在所述绞盘上;可调速滑轮组,所述可调速滑轮组包括第一滑轮组和第二滑轮组,所述第一滑轮组固定于所述次平台框架顶部,所述第二滑轮组设置在所述保护罩靠近所述绞盘的一侧;所述供水数据传输管穿过所述第一滑轮组和所述第二滑轮组缠绕在所述绞盘上;抽水泵,所述抽水泵的一端通过抽水管与海水连接,所述抽水泵的另一端与所述供水数据传输管连接;其中,所述绞盘和所述抽水泵均设置在所述主承载平台框架上
3、在第一方面中,所述柔性自驱式海洋静力触探系统还包括:集控模块,所述集控模块分别与所述供水数据传输管、所述动力履带、所述可控滑轨、所述夹持器、所述反力感应架、所述绞盘、所述第一滑轮组、所述第二滑轮组和所述抽水泵电连接;供电模块,所述供电模块与所述集控模块电连接;其中,所述集控模块和所述供电模块均设置在所述主承载平台框架上。
4、在第一方面中,所述供水数据传输管包括:供水管,所述供水管的一端与所述抽水泵的另一端连接,所述供水管的另一端与所述动力喷嘴装置连接;数据传输电缆,所述数据传输电缆的一端与所述集控模块电连接。
5、在第一方面中,所述水动力自驱式探头装置还包括:电控模块,所述电控模块设置在所述动力喷嘴装置下方,所述电控模块与所述数据传输电缆的另一端电连接;其中,所述电控模块与所述动力喷嘴装置电连接,所述电控模块与所述动力喷嘴装置均设置在第一探头装置本体内。
6、在第一方面中,所述水动力自驱式探头装置还包括:传感器模块,所述传感器模块与所述电控模块电连接,所述传感器模块设置在第二探头装置本体内;探头,所述探头的上端对称设置有两个摩擦传感器,所述探头的下端对称设置有两个第一压力传感器;配重仓,所述配重仓设置在所述第二探头装置本体和所述探头之间;其中,每一个所述摩擦传感器和每一个所述第一压力传感器分别与所述电控模块电连接;所述第二探头装置本体、所述配重仓和所述探头一体成型制得;所述第一探头装置本体与所述第二探头装置本体通过螺纹连接。
7、在第一方面中,所述传感器模块包括姿态传感器、速度传感器和轨迹检测器,所述姿态传感器、所述速度传感器和所述轨迹检测器均与所述电控模块电连接。
8、在第一方面中,所述动力喷嘴装置具有一腔室,所述腔室上方设置有若干可调控喷嘴;所述夹持器包括四个钢爪。
9、在第一方面中,所述绞盘的底部设置有轴承,所述绞盘由钢材制成;所述第一滑轮组和所述第二滑轮组均设置有一旋转电驱动器,每一个所述旋转电驱动器与所述集控模块电连接。
10、在第一方面中,所述反力感应架具有一钢制平台,所述钢制平台中间设置有一传输孔,所述钢制平台靠近所述动力喷嘴装置的一侧设置有第二压力传感器。
11、本发明还提供了一种柔性自驱式海洋静力触探系统的使用方法,所述使用方法用于上述的柔性自驱式海洋静力触探系统,所述使用方法具体包括:组装沉海准备:通过集控模块控制动力履带将柔性自驱式海洋静力触探系统运送至指定位置,再通过所述集控模块控制可控滑轨将保护罩下放至触碰海床平面;调姿:通过所述集控模块控制抽水泵向动力喷嘴装置内部抽水,开启所述动力喷嘴装置的喷嘴,通过反应感应架检测从所述动力喷嘴装置的喷嘴中喷出水的反冲力,判断所述动力喷嘴装置是否正常运行,同时,通过调节所述动力喷嘴装置的喷嘴阀门控制所述动力喷嘴装置的喷嘴中喷出水的反冲力的大小调节水动力自驱式探头系统至垂直姿态;自驱贯入:待水动力自驱式探头系统保持垂直稳定姿态时,通过所述集控模块控制夹持器打开,同时控制绞盘转动,并控制可调速滑轮组的转速,使水动力自驱式探头系统以垂直于地平面的状态匀速贯入海底土层,进行触探;回收:待触探完毕后,通过所述集控模块控制所述抽水泵停止工作,再通过所述集控模块控制所述绞盘转动和所述可调速滑轮组转动回收水动力自驱式探头系统,然后通过所述集控模块控制所述夹持器固定所述水动力自驱式探头系统,最后通过所述集控模块控制动力履带移动至下一个触探位置。
12、有益效果:
13、本发明的柔性自驱式海洋静力触探系统在运行过程中,动力履带起到移动柔性自驱式海洋静力触探系统整体的作用,将柔性自驱式海洋静力触探系统移动到指定的地方进行触探,可减少沉海误差;到达指定地点后,由于保护罩通过可控滑轨设置在主承载平台框架上,通过控制可控滑轨使保护罩下放至接触到海床平面,保护罩的下部开口为薄钢圆筒构件,可保护水动力自驱式探头装置在贯入前被水流影响贯入角度,在保护罩下方的过程中,绞盘开始运行,第一滑轮组固定在在次平台框架的顶部,位置不会随着保护罩的下放而改变,而第二滑轮组固定在保护罩上,第二滑轮组会随着保护罩的下放而下移,但不会改变供水数据传输管的运动线速度;然后利用抽水泵抽取海水通过供水数据传输管流入动力喷嘴装置,动力喷嘴装置再通过喷嘴向外喷水,喷出的水具有有一个反冲力作用于反应力感应架,反应力感应架监测到水的反冲力,证明动力喷嘴装置正常运行;通过传感器模块测定水流速度和水动力自驱式探头装置的姿态,然后通过传感器模块的测定数据来调节动力喷嘴装置的喷嘴阀门的大小控制水动力自驱式探头装置的姿态,使水动力自驱式探头装置保持垂直稳定性及水动力自驱式探头装置的贯入速度,保证探头贯入角度数据更加精准;接着打开夹持器,水动力自驱式探头装置在动力喷嘴装置喷出的水的反冲力的作用下垂直稳定向下贯入至土层,完成触探,在这个过程中,抽水泵是持续向动力喷嘴装置抽水的,同时,第一滑轮组和第二滑轮组以及绞盘是匀速转动的,通过第一滑轮组、第二滑轮组和绞盘的转速进一步的控制水动力自驱式探头装置的贯入速度,相较于传统液压油缸控制更加精准,且连续贯入时间更长;本发明的柔性自驱式海洋静力触探系统的探头设置在水动力自驱式探头装置上,且在探头随着水动力自驱式探头装置的贯入阶段,直接使用海水的反冲击力作为动力来源,无需液压油缸提供贯入力,减少了能源消耗,绿色环保,还避免了探杆过长弯曲导致数据失真,同时,通过调节海水的反冲击力调整并维持水动力自驱式探头装置的垂直姿态,避免了贯入深度过大侧向约束较弱情况导致探杆失稳的影响,有效的提高了贯入深度;除此之外,还可以通过水动力自驱式探头装置监控水动力自驱式探头装置和探头的贯入轨迹,在水动力自驱式探头装置上设置的供水数据传输管具有较小的体积,替代了传统探杆,可减小水动力自驱式探头装置的体积,提高贯入深度;在本发明中,柔性自驱式海洋静力触探系统的构件组合拆卸比较方便,便于构件的更换和维修,同时,本发明的柔性自驱式海洋静力触探系统可实现多次工业复制。
- 还没有人留言评论。精彩留言会获得点赞!