一种基于仿生学的静力触探自主贯入系统
本发明涉及土工原位测试领域,一种基于仿生学的静力触探自主贯入系统,适用于在大型机械难以到达的地点开展静力触探试验,用于进行土层划分和估算土的物理力学性质指标等。
背景技术:
1、在各类工程项目设计和施工之前,需要首先通过原位测试或室内试验测量地基土的物理力学性质,与室内试验相比,原位测试具有能反映土体在天然应力状态下的特性、测量范围大、试验周期短等优点。静力触探是利用准静力以恒定的速率将圆锥形探头通过一系列探杆压入到土中,测量贯入过程中探头所受到的锥尖阻力,侧壁摩阻力和孔隙水压力的一种原位测试技术。静力触探的试验结果可用于土层划分、土体分类和估算各土层的物理力学性质指标,是目前岩土工程领域中应用最广的原位测试技术之一。
2、静力触探试验的贯入深度主要取决于贯入设备能力的大小以及可以提供的反力大小,因此传统的静力触探贯入系统往往包含体积庞大的反力装置,反力装置的作用是固定加压装置,提供探头在贯入过程中所需要的反力,可分为自重式和锚式。而在有些地点不具有使用大型反力装置的条件,如深海、深空等人类及大型机械难以到达的地点等,因此传统的静力触探贯入系统极大地限制了静力触探试验适用的场地范围。
3、仿生学是在工程上实现并有效地应用生物功能的一门学科。蛏子生活在浅海,涨潮就在水里,退潮就钻进沙子里,蛏子先用外硬壳支撑两侧土体,然后内部软体晶杆向下钻进,待内部软体晶杆钻入一定深度后,收缩外硬壳并沿内部软体晶杆向下移动,以此往复可以不断的向滩涂的沙地中钻进。蚯蚓是依靠纵肌、环肌的交互舒缩及体表刚毛的配合完成运动的,当蚯蚓前进时,身体后部的刚毛钉入土内不动,这时环肌收缩,纵肌舒张,身体就向前伸;接着身体前端的刚毛钉入土内不动,这时纵肌收缩、环肌舒张,身体向前缩短而前进。
4、基于“蛏子钻沙”以及“蚯蚓移动”的原理,本专利发明了一种静力触探自主贯入系统。传统的静力触探贯入系统需要体积庞大的反力装置、一系列探杆、且只能实现垂直贯入。
技术实现思路
1、针对上述现有技术,本发明提供一种基于仿生学的静力触探自主贯入系统,该系统可以利用周围岩土体自身提供反力,因此不需要反力装置和探杆,而且贯入过程中可以改变方向。与传统贯入系统相比,该自主贯入系统对周围环境扰动小、耗能少、成本低。
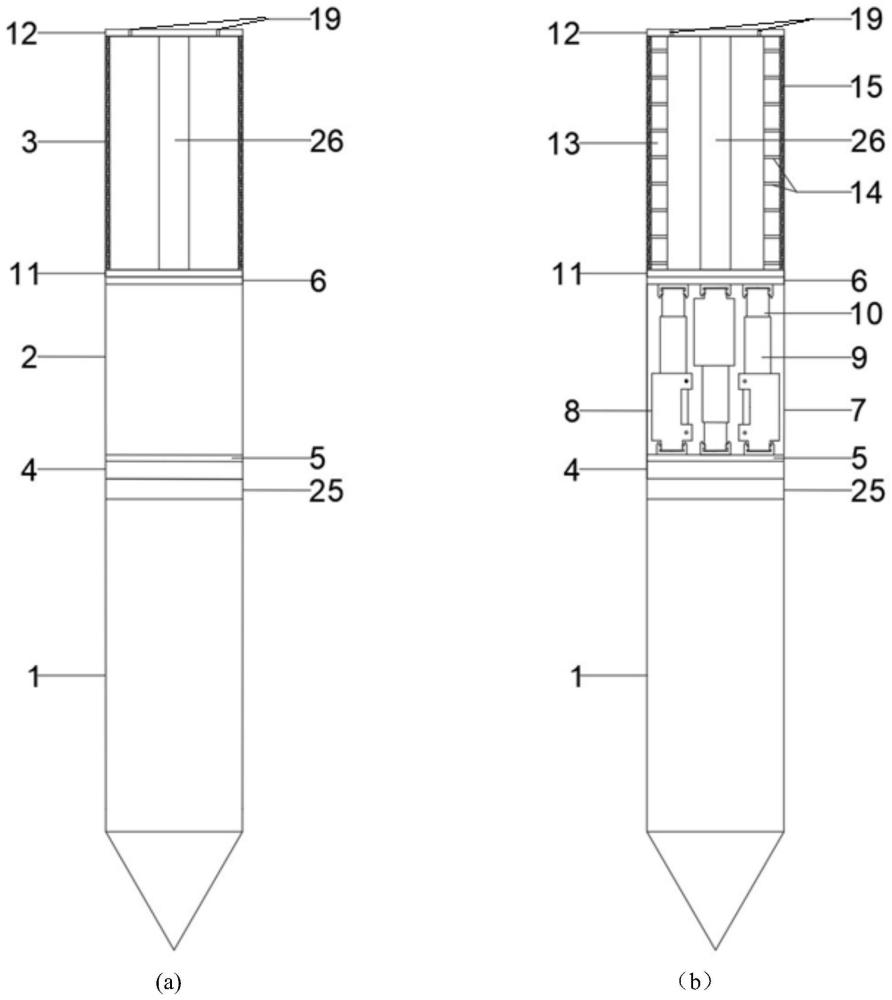
2、为了解决上述技术问题,本发明提出的一种基于仿生学的静力触探自主贯入系统,包括上部膨胀装置、加载装置、下部展缩装置和静力触探探头;
3、所述上部膨胀装置包括膨胀装置壳体,所述膨胀装置壳体由膨胀装置底座、膨胀装置侧壁和膨胀装置顶板构成,所述膨胀装置顶板设有注水孔,所述膨胀装置侧壁包括空心圆柱筒,所述空心圆柱筒的筒壁上设有透水孔,所述空心圆柱筒的外围包覆有弹性膜;所述空心圆柱筒的上下两端分别与所述膨胀装置底座和所述膨胀装置顶板固定连接,所述弹性膜的上下两端分别与所述膨胀装置底座和膨胀装置顶板密封连接;当需要上部膨胀装置提供反力时,自所述注水口向空心圆柱筒内注入压力水,压力水通过透水孔充入弹性膜;
4、所述加载装置包括加载装置壳体,所述加载装置壳体由加载装置底座、加载装置侧壁和加载装置顶板构成,所述加载装置侧壁由周向刚性、轴向可伸缩的材料制成;所述加载装置底座与加载装置顶板之间、按照前后对称和左右对称分别设置有四组液压加载单元,每组液压加载单元包括液压缸、活塞和活塞杆;
5、所述上部膨胀装置底座和加载装置顶板之间固定相连;自所述膨胀装置顶板依次经过所述空心圆柱筒和所述上部膨胀装置底座至所述加载装置顶板贯穿的设有一个钢管,所述液压缸的液压管路通过所述钢管外接至液压泵;所述加载装置底座的底面中心位置处设有轴承孔,在所述轴承孔的外围设有呈放射状布置的六个直线滑槽;
6、所述下部展缩装置包括六个金属叶片和由伺服电机带动的中心转轴,所述中心转抽上固定有转臂架,所述转臂架包括六个固定杆,所述固定杆的一端与所述转轴固定;六个固定杆与六个金属叶片之间分别设有传动及执行机构,所述传动及执行机构包括连杆,所述连杆的一端通过铰轴与固定杆另一端铰接,所述连杆的另一端通过铰链铰接有滑块,所述滑块嵌装在所述直线滑槽内、并与所在直线滑槽滑动配合;每个金属叶片分别与同一传动及执行机构中的铰轴和铰链铰接;控制并驱动所述伺服电机正转或反转做60°旋转,所述中心转轴通过传动及执行机构带动所有金属叶片同步旋转、并沿所述中心转轴的径向展缩移动;
7、所述静力触探探头内包含均与所述控制器相连的锥尖阻力传感器、侧壁摩阻力传感器、孔隙水压力传感器和测斜传感器;所述伺服电机、所述液压泵、注水管均与所述控制器相连。
8、进一步讲,本发明所述的基于仿生学的静力触探自主贯入系统,其中:
9、六个固定杆和六个金属叶片均呈放射状布置。
10、驱动所述伺服电机后,在中心转轴的带动下,所述转臂架同步转动,所述固定杆拉动传动及执行机构中的连杆,使得铰链靠近或远离所述中心转轴,从而带动金属叶片在其平面内展开和缩回。
11、所述静力触探探头的顶板上设有轴承,所述中心转抽的两端分别通过轴承支撑在所述加载装置底座与静力触探探头顶板之间。
12、通过控制所述加载装置中四个活塞杆的伸长幅度,实现改变所述静力触探探头的贯入方向。
13、所述伺服电机的电线通过所述钢管连接至电源。
14、与传统静力触探贯入系统相比,本发明静力触探自主贯入系统的有益效果是:
15、(1)传统的静力触探贯入系统需要在地表设置自重式或锚式的反力装置,对周围环境的扰动较大。而本发明的自主贯入系统根据蛏子钻沙以及蚯蚓移动的原理设计了上部膨胀装置3、加载装置2和下部展缩装置4,上部膨胀装置3和下部展缩装置4可以通过岩土体自身给加载装置2提供反力,因此不需要在地表设置体积大、重量重的反力装置,可用于深海、深空等人类及大型机械难以到达的地点,极大地拓展了静力触探试验的场地适用范围。
16、(2)传统的静力触探贯入系统需要在探头的上部连接一系列探杆,加载装置通过探杆将探头贯入到土体中,探杆与周围土体的摩擦力会极大地增大贯入阻力。贯入的深度越深,探杆与土体之间的摩擦力就会越大,贯入阻力也就越大。而本发明设计的贯入系统根据蚯蚓纵肌、环肌交互舒缩向前移动的原理将加载装置2直接设置在了静力触探探头1的上部,而且随着静力触探探头1的向下贯入,加载装置2会跟着静力触探探头1逐渐向下移动。因此不需要在两者之间设置探杆,可以极大地减小贯入到相同深度时所需要的贯入力,或者在相同贯入力下使静力触探探头1贯入到更深的土体中。
17、(3)传统静力触探贯入系统的加载设备和反力装置在地表固定不动,而本发明自主贯入系统的加载装置2、上部膨胀装置3和下部展缩装置4可以随着静力触探探头1的贯入逐渐向下移动。当加载装置2伸长时,上部膨胀装置3保持不动,下部展缩装置4和静力触探探头1向下移动;当加载装置2收缩时,下部展缩装置4和静力触探探头1保持不动,上部膨胀装置3向下移动。通过不断的循环此过程,可以使静力触探探头1逐渐贯入到指定深度处。
18、(4)传统静力触探贯入系统只能使探杆和探头竖直贯入到土体中,而本发明自主贯入系统在探头贯入时可以随时改变角度,从而使探头以任意方向在土体中贯入。加载装置2中设有四个活塞杆10,四个活塞杆10的伸长幅度相同时贯入方向不变,当四个活塞杆10的伸长幅度不同时,可以实现静力触探探头1贯入方向的改变,如图9所示,其中,(a)示出了静力触探探头1转向示意图,(b)示出了探头转向时,加载装置中各活塞杆10的伸长幅度。图10中,(a)示出了是活塞杆伸长后加载装置的外观图,(b)示出了活塞杆收缩后加载装置的外观图,(c)示出了由于加载装置中各活塞杆的伸长幅度不同,从而实现静力触探探头转向贯入时加载装置的外观图。
- 还没有人留言评论。精彩留言会获得点赞!